地磁匹配导航中适配区的选择*
2011-11-14王向磊苏牡丹申杰敏
王向磊 苏牡丹 丁 硕 申杰敏
(1)解放军信息工程大学测绘学院,郑州 450052 2)63999部队,北京 100094
3)61081部队,北京100094)
地磁匹配导航中适配区的选择*
王向磊1)苏牡丹2)丁 硕3)申杰敏3)
(1)解放军信息工程大学测绘学院,郑州 450052 2)63999部队,北京 100094
3)61081部队,北京100094)
对地磁匹配导航中适配区的选择进行了研究,给出了选择适配区的基本原则,研究了基于磁场特征参数和基于地磁特征参数信息熵的适配区选择方法,结果表明基于地磁特征参数信息熵的适配区选择方法更有效,更适合作为适配区的选择标准。
地磁匹配导航;适配区;地磁信息熵;地形特征;选择标准
1 前言
由于磁场是地球本身的固有特性,获取地磁场信息的方式也是完全被动和无源的,因此地磁导航技术逐步成为21世纪导航技术发展的一个新方向,成为各个国家争相发展的热点[1-4]。
地磁匹配导航中适配区的选择是一个关键问题,影响导航精度。在相同的导航误差条件下,不同的航行轨迹会产生不同的磁场匹配辅助导航结果,尤其在磁场数据噪声高的情况下,航行区域和航迹的选择会直接关系到匹配的成功[5-7]。因此,事先对舰船航行海域进行磁场匹配导航的可导性评估,进而根据可导航性分析数据设计优化的舰船航行线路,对于地磁匹配导航的实际应用具有十分重要的意义。本文针对地磁匹配导航中适配区的选择、基于地磁特征参数的可导航性分析方法和基于地磁特征参数信息熵的可导航性分析方法等问题进行了研究,并结合实例,论证了基于地磁特征参数信息熵的可导航性分析方法更有效。
2 基于磁场特征参数的适配区选择方法的分析与计算
对地形的可导航性分析,大多从“地形特征参数”统计特性出发进行研究[5]。根据相关极值导航系统原理,在进行相关磁场匹配导航时,必须首先确定当前时刻和以前时刻的一组磁场测量值向量,然后根据惯导指示位置从参考磁场图上提取若干与测量值向量等长度的参考磁场向量,它们之间通过某种相关极值运算来估计载体当前的位置。
借鉴地形特征统计参数定义,可获得相对应的磁场特征参数,定义M×N的磁场数据网格,T(i,j)为其中网格点坐标为(i,j)处的磁场值。为了分析局部磁场的统计特征,定义大小为(2m+1)(2n+ 1)的局部计算窗口,用来计算局部磁场的各个统计参数。当计算窗口的中心在整个区域全部网格点上移动一遍后,就可以得到整个磁场区域的各个局部的统计特征值。由分析可知,借鉴地形特征参数定义,可得到如下磁场特征参数:
1)局部磁场标准差

2)局部磁场绝对粗糙度
经度方向的绝对粗糙度rλ:

纬度方向的绝对粗糙度rφ:

3)局部磁场相关系数
经度方向的相关系数:

纬度方向的相关系数:

4)局部磁场坡度
坡度S定位为磁场曲面上一点处的法线方向和垂直方向的夹角,它可以由磁场在经度方向和纬度方向的变化率Sλ和Sφ来确定:
为了说明以上特征参数所反映的磁场特征,绘出某区域分辨率为2'×2'的磁场格网数据(EMAG2)等值线图(图1),其中磁场变化最大值为402.204 2 nT,最小值为 -333.898 9 nT,均值为-8.231 8 nT,方差为57.105 0 nT。
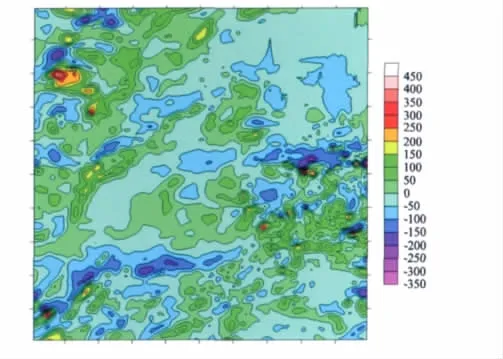
图1 磁场异常等值线图(单位:nT)Fig.1 Contour map of geomagnetic anomaly(unit:nT)
由式(1)~(3)可知,标准差反映了地磁格网数据的离散程度和整个区域总的起伏程度,粗糙度反映的是整个区域的平均光滑程度。通过编程计算,绘制出标准差图2(a)和2(b)、经纬度粗糙度图3 (a)和3(b),由仿真结果可以看出:3种统计参数的绘图都反映了区域的磁场数据变化,且趋势一致,即磁场异常变化越大,相应区域的磁场统计参数值也越大。
图2(a)表示了地磁场标准差特征参数小于10的区域,图2(b)绘制了标准差特征参数的3D表面图,这些区域都是磁场变化不明显的区域,都不利于地磁匹配导航的实施。
图3(a)表示了地磁场纬度粗糙度小于5的区域,图3(b)表示了地磁场经度粗糙度小于5的区域,这些区域都是磁场变化不明显的区域,都不利于地磁匹配导航的实施。
相关度是表示磁场变化快慢的关键参数,相关度越大,地磁数据的相关性越强,供匹配用的测量和基准数据就要多,相反相关度越小,说明数据之间独立性强,地磁特征较丰富。图4(a)和4(b)就反映了研究区域的磁场相关系数。
由以上分析可知,用来进行可导航性分析的特征参数非常多,这些参数也确实能在不同的侧面反映地磁分布与匹配成功概率的部分关系,但是,这些参数都有其局限性,即只能反映一个方面的磁场特征。因此利用任意一个统计参数来表现磁场区域的可匹配性是不够的,在实际分析区域可匹配性的过程中,往往要同时用到多个参数来进行比较和分析。从目前的资料来看,参数选择一般没有具体的标准,只能通过大量的试验获得统计标准,但由于选择过多,容易因为参数的差异导致错过有效区域。
3 基于磁场特征参数信息熵的适配区选择方法的分析与计算
利用信息熵进行可匹配区的划分是可匹配区划分方法的一大进步,其计算公式为[6]:

其中I为信息量,p(xi)表示事件xi出现的概率,对数的底a决定信息量的单位,如a=2,则信息量的单位为比特(bit)。通过比较高程差的地形熵,从而匹配得到准确的潜器位置[7]。
上述方法仅用磁场信息熵一个参数,即可对区域的可匹配性进行分析,但是在体现磁场特征方面却显得不够全面。由可匹配区划分的基本原则可知,完善的磁场可匹配区划分标准,应能同时反映磁场区域的相对变化和绝对变化,且形式简明。本文借鉴两种方法的优点,给出一种基于“磁场特征参数信息熵”的可匹配区划分方法,方法的具体原理如下:
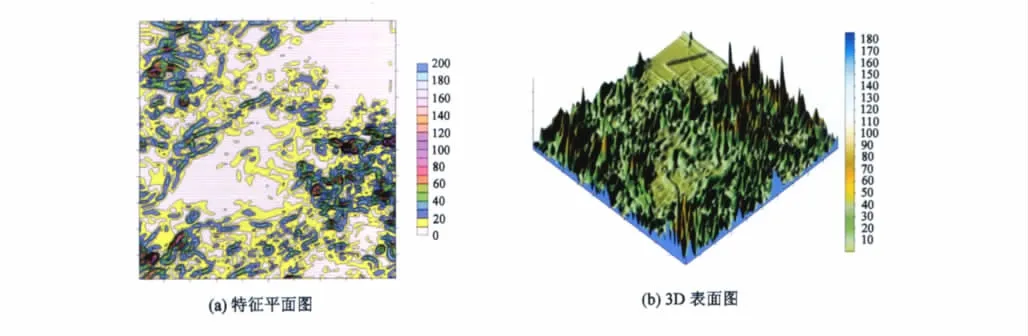
图2 区域地磁场标准差示意图Fig.2 Graphs of standard deviation of regional magnetic field
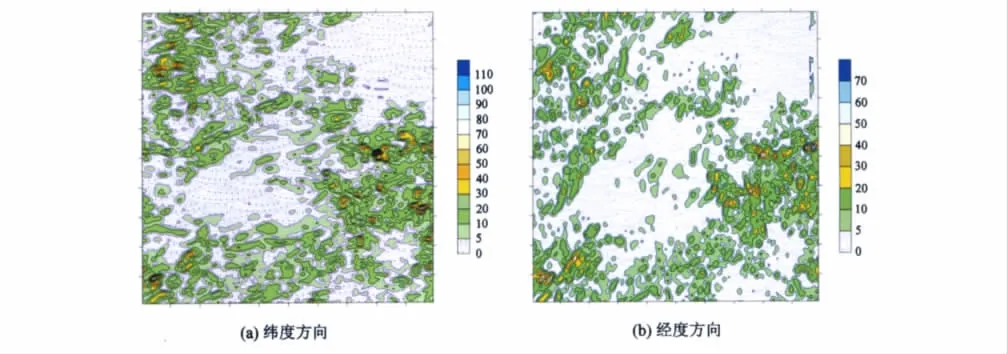
图3 区域地磁场粗糙度示意图Fig.3 Graphs of regional magnetic field roughness

图4 区域地磁场相关系数示意图Fig.4 Graphs of correlation coefficient of regional magnetic field
根据磁场特征参数的定义,纬度粗糙度rφ反映了磁场数据在纬度方向的变化,相对应的经度粗糙度rλ反映的是经度方向的变化,根据两种粗糙度并顾及信息熵的定义,可求解两种粗糙度的熵值

粗糙度的熵值可均衡体现磁场在两个方向上的变化,例如某区域中,磁场仅在纬度方向变化大,而在经度方向变化小,此时的熵值会非常小,若使熵值变大磁场需在两个方向上均衡变化。因而,根据粗糙度熵值的大小,可观察区域磁场在两个方向上的变化:熵值越大磁场变化越均衡,潜在的可匹配性能就越好,反之则越差。而熵值只能体现磁场的相对变化,有可能某区域的磁场在两个方向的绝对变化都非常小,但由于变化比较均衡,此时该区域的磁场熵值也可能很大。要想全面反映区域的磁场变化,磁场熵值还应能反映区域的绝对磁场变化,而磁场特征参数中的标准差σ恰恰是这一指标的反映,两种参数结合在一起就可较好地体现磁场的变化特征。由这一分析出发,最终给出网格点坐标为(i,j)处的磁场特征参数信息熵的公式如下:
Iij=-(p(rφ)logap(rφ)+p(rλ)logap(rλ))σij(9)
当计算窗口的中心在整个区域全部网格点上移动一遍后,就可以得到整个磁场区域的磁场特征参数信息熵。以图1仿真区域的磁场异常数据为例,计算的磁场特征参数信息熵值如图5所示。
熵值中最大值为163.285,最小值为0。由图5的熵值3D图,可了解区域磁场变化的基本特征:特征参数信息熵值越大的地方,磁场起伏也越大,在经、纬方向的变化也越均衡,反之亦然。根据计算的特征参数信息熵值,该海域磁场特征参数(熵值:0~10)的分布情况如图6所示圆点填充的区域。
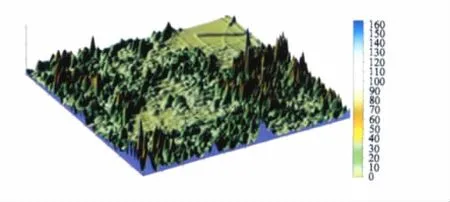
图5 区域地磁场特征参数信息熵图Fig.5 Graphs of the entropy of geomagnetic characteristic parameter
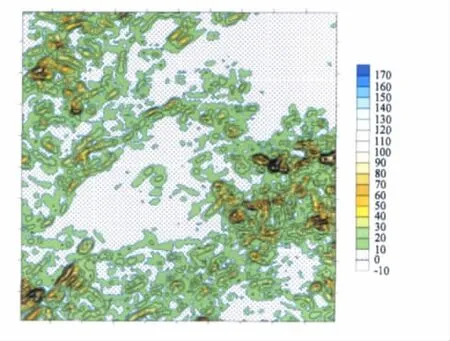
图6 可匹配区划分图Fig.6 Graphs of matching region partition
由图6可以看出,该研究区有接近一半海域的特征参数信息熵值在10以下,其中有两块分别位于地图右上角和地图中间偏下的区域磁场特征变化不明显,这说明该海域有利于磁场匹配辅助导航的实施。特征参数熵值在10以上的区域分布较广,且面积较大,在这些区域实施磁场匹配辅助导航时,比较容易实现。按照磁场特征参数信息熵这种划分可匹配区的方法,仅用一个参数即可反映区域磁场的变化方向及幅度,比用多种磁场特征参数分析更为方便。
4 航迹规划仿真试验
可匹配区划分的目的是对水下潜器的航迹进行规划,以保证地磁场匹配导航技术的可靠实施。在借鉴地形匹配特征参数来划分地磁可匹配区优点的基础上,本文提出一种利用特征参数信息熵的可匹配区划分方法,通过解算航行海域的磁场特征参数熵值,对海域的磁场可匹配区进行划分。为了验证这种划分方法的有效性,我们设计可导区和非可导区航线,检验由本文提出的磁场特征参数熵值所划定的海域可匹配性,本节分别设计两条航线进行仿真计算,两条航迹如图所示,起点均为(126.50°E,36.5°N),采样时间间隔都是12分钟,其中航迹1穿过特征信息熵平缓变化地区,即第3节所划定的不可匹配区,航迹2穿过可匹配区。仿真中,两航迹均取50个采样点,两条匹配航迹均由ICCP算法进行匹配计算,图7~10为两条航迹给出的仿真试验结果。
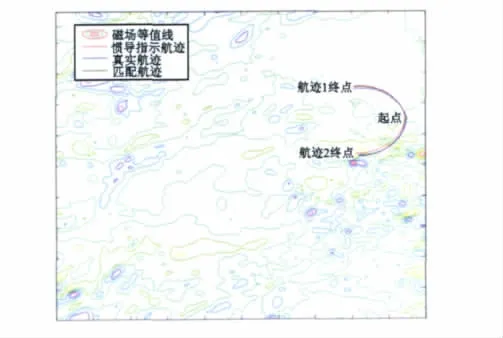
图7 两条航线的匹配仿真结果Fig.7 Matching result of the two paths
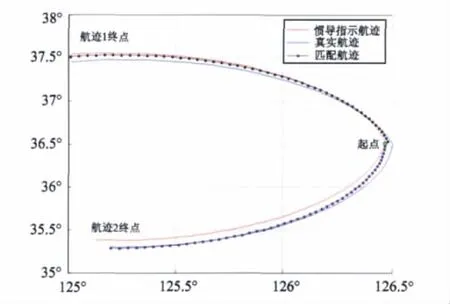
图8 匹配仿真结果放大图Fig.8 Amplified chart of simulated result of the two paths
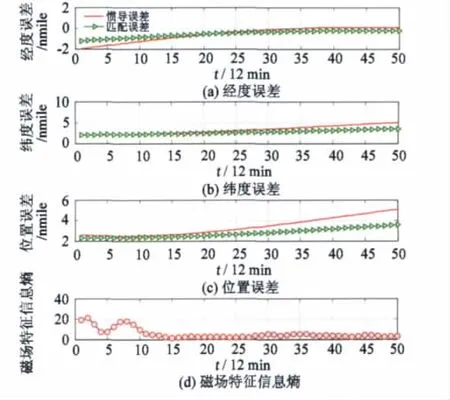
图9 航迹1匹配结果Fig.9 Various matching error of path 1
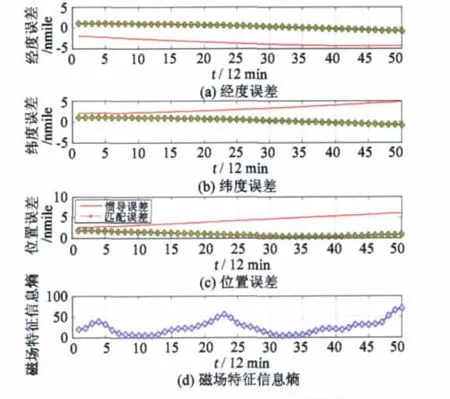
图10 航迹2匹配结果Fig.10 Various matching error of path 2
由图7~10给出的两条航迹匹配仿真结果,由图可以看出:航迹2的匹配航迹较好地反映了真实航迹,匹配误差较小;航迹1无法获得有效定位,定位误差也是随时间发散的;航迹2所穿过的区域磁场特征信息熵无论在幅度和变化上都较航迹1大一些。通过以上试验,我们可以得出以下结论:利用地磁场特征信息熵对磁场区域的可匹配性进行分析是可行的,在此基础上对舰船的航迹进行规划,可有效改进磁场匹配辅助导航技术的应用效果。另外为了进一步提高匹配导航的效率,可采用运筹学中的动态规划方法,使舰船所经航线上具有最大的磁场特征参数熵值,只是由于涉及到实际的舰船操作问题,这种方法只能在海况和航行状况较好的情况下实施。
1 许大欣.利用重力异常匹配技术实现潜艇导航[J].地球物理学报,2005,48(4):812-816.(Xu Daxin.Using gravity anomaly matching techniques to implement submarine navigation[J].Chinese J Geophys,2005,48(4):812-816)
2 郝燕玲,赵亚凤,胡峻峰.地磁匹配用于水下载体导航的初步分析[J].地球物理学进展,2008,23(2):594-599.(Hao Yanling,Zhao Yafeng and Hu Junfeng.Preliminary analysis on the application of geomagnetic field matching in underwater vehicle navigation[J].Progress In Geophysics,2008,23(2):594-599)
3 Feng H,et al.Data map characteristic in aided navigation[J].IEEE PLANS,Position Location and Navigation Symposium,2004:771-774.
4 Paul J and Neil D.A method for registration of 3-D shapes[J].IEEE Trancetions on Pattern Analysis and Machine Intelligence,1992,14(2):239-256.
5 李德华,杨灿,胡昌赤.地形匹配区选择准则研究[J].华中理工大学学报,1996,24(2):7-8.(LI Denghua,Yang Can and Hu Changchi.Selection criterion study for terrain matching area[J].Journal of Huazhong University of Technology,1996,24(2):7-8)
6 程力,张雅杰,蔡体菁.重力辅助导航匹配区域选择准则[J].中国惯性技术学报,2007,15(5):559-563.(Cheng Li,Zhang Yajie and Cai Tijing.Selection criterion for matching area in gravity aided navigation[J].Journal of Chinese Inertial Technology,2007,15(5):559-563)
7 苏康,等.在不同地形条件下的地形辅助导航系统定位精度评估[J].宇航学报,1998,19(1):84-89.(Su Kang,et al.Positioning accuracy evaluation of a terrain-aided navigation system under different types of terrain[J].Journal of Astronautics,1998,19(1):84-89)
SELECTION OF GEOMAGNETIC ADAPTABLE MATCHING AREA IN GEOMAGNETIC MATCHING NAVIGATION
Wang Xianglei1),Su Mudan2),Ding Shuo3)and Shen Jiemin3)
(1)Institute of Surveying and Mapping,Information Engineering University,Zhengzhou 450052 2)63999 Troops,Beijing 100094
3)61081Troops,Beijing100094)
A reasonable geomagnetic adaptable matching area can improve the navigation accuracy effectively.The selection of geomagnetic adaptable matching area based on geomagnetic field character and on geomagnetic character parameter information entropy are compared.Through a particular case,it is shown that the selection based on geomagnetic character parameter information entropy is more effective and more appropriate as the standard of the selection of geomagnetic adaptable matching area.
geomagnetic matching navigation;matching section;geomagnetic information entropy;terrain character;standard of selection
1671-5942(2011)06-0079-06
2011-08-20
国家自然科学基金(41174026,41104047)
王向磊,男,博士研究生,主要研究方向:地球物理导航及其辅助导航.E-mail:chxywxl@163.com
U666
A
