用于高速球一体机中的实时快速自动调焦系统的研究
2011-11-02雷玉堂
雷玉堂
用于高速球一体机中的实时快速自动调焦系统的研究
雷玉堂
自动调焦技术近年在高速球型一体化摄像机中得到广泛应用。但目前国内生产的一些高速球,其自动调焦系统在精度和响应时间上均不能满足实际需要。一种可用于高速球型一体化摄像机中的实时快速自动调焦技术经过研究,已经问世。

引言
自动调焦技术是自动显微镜与各种自动摄影摄像设备的核心技术之一,因为它既可提高观测精度又可减轻操作人员的劳动强度,因而在高速球型一体化摄像机中获得广泛应用。但是,目前在国内生产的一些高速球中的自动调焦系统,其精度与响应时间(大于1s)均不能满足实际需要。研究实践证明,要想使自动调焦技术具有实际使用价值,至少要达到以下指标:
自动调焦精度等于或高于目视对图像清晰程度的认同值(目视调焦精度一般大于±2μm);至少使得在更换不同倍率的物镜时,从图像离焦状态到图像清晰状态运作过程与熟练的操作人员手动操作时间相当或更快;具有实时跟踪调焦功能。
笔者经过多年对自动调焦技术的研究与探索,己研发了一种可用于高速球型一体机中的实时快速自动调焦技术,其性能已远远超过上述三方面的指标。如本系统的自动调焦精度≤±0.5μm;物镜变倍或转动对远近物体的实时跟踪调焦的响应时间均≤1.0s。
现将这种自动调焦系统的组成、原理、目标函数的选择、快速实时调焦参数优化、在高速球型一体机中的实时快速调焦的实现等作简要介绍。
实时快速自动调焦系统的组成及原理
自动调焦技术包括调焦(即轴向定位)与伺服运动两大部分,而调焦是核心。但要实施自动调焦,则先要利用离焦检测,去快速动态地进行离焦识别,并通过离焦信号控制伺服系统的执行机构,动态实时快速响应,以自动补偿其离焦量。现代的光电仪器系统实现离焦检测常用方法有两大类:一是用计算机处理视频图像,获取离焦信息;二是用光电法测量物距,提取离焦信号。而伺服系统的执行机构,常选用压电陶瓷或步进电机。
一般,物镜成像都源于透镜成像公式:

式(1)中,D代表物距;d代表像距;f代表透镜焦距
由式(1)可知,当物距D发生变化时,由于物镜的焦距f不变,要获取清晰的像,就需要改变像距d。但对定焦物镜来说,系统一旦确定,焦距f不变,像距d也是固定的。因此,只有靠调整物面沿光轴的位置,才能得到清晰的物镜像。所谓调焦,就是指沿光轴方向改变物面与物镜的相对位置,使物像关系满足公式(1),以获取清晰的图像。
自动调焦按信号检测的方法也可分为直接调焦与间接调焦两种。本文所设计的图像处理法自动调焦就是一种直接调焦方法,它是通过对成像质量进行图像处理而实现自动调焦的。这种基于图像处理而实现实时快速自动调焦系统的组成及原理框图如图1所示。
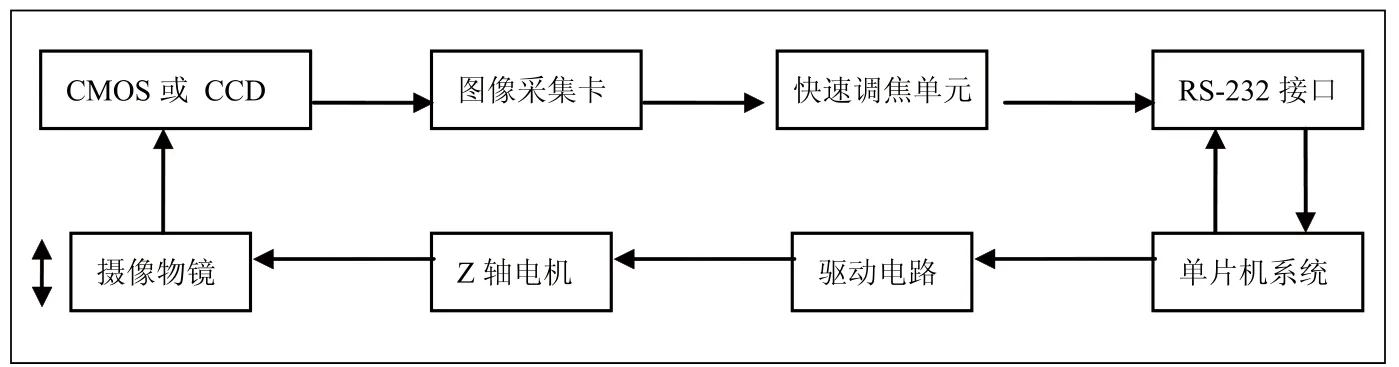
图1 实时快速自动调焦系统的组成及原理框图
在高速球型一体化摄像机中,目标物体经摄像物镜和光学接口成像于CMOS或CCD图像传感器上,并转换成连续的模拟图像信号,由A/D转换或图像采集卡将模拟图像信号转换成数字图像信号,送入微型计算机的快速自动调焦单元(实际产品则用DSP)进行图像的清晰度计算,并分析图像的离焦状态,然后通过RS-232接口发送命令和数据给单片机系统来控制Z轴步进电机的步距和转向,以进行调焦。这种自动调焦过程,实质上是一个闭环控制过程,不断地重复循环,直到快速找到最清晰图像时停止。
目标函数的选择
图像清晰度检测方法的核心问题是确定合适的评价参数,它应具备下列几个特征:
无偏性:即当物平面和对准平面重合时,该评价参数才取极值。
单峰性:即只有齐焦时,该评价参数才取极值。
能反映离焦极性:这样,才能为调焦控制确定电机正确的运动方向。
具有足够的信噪比:只有这样,才能保证可靠地检测正常焦深范围内的离焦程度。
据此,可以把评价参数引用自动调焦的评价函数和目标函数之中。
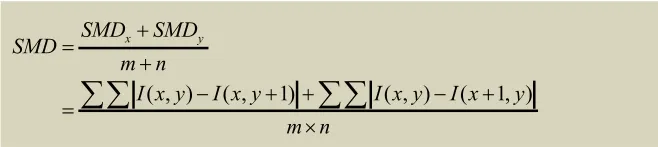
由光电与数字图像处理的理论知,信号或图像的能量大部分集中在幅度谱的低频和中频段,但图像轮廓的锐度和细节的丰富度则又取决于图像的高频成分。因此,各种检测图像的边缘信息或计算图像的高频分量的自动调焦方法应运而生。一帧图像中视频信号的高频成分值被称为调焦评价函数,自动调焦的过程,就是求取调焦评价函数的最大值的过程。近年来,对此发展的方法有阈值积分法、高频带通法、微分梯度法、信息熵法和方差评价函数法等。为了提高计算的速度,这里采用相邻像素间的平面灰度方差算法SMD(Surn Modulus Difference)作为全局图像调焦目标函数。该算法以图像强度函数的一阶微分作为高通滤波器,藉以提取图像中的高频分量。SMD算法公式为:
快速调焦参数的优化
由于摄像物镜变倍或快速球转动时,物体成像会发生一定范围的离焦现象,如采用一般的调焦技术时,就要花较长时间才能定位到最清晰的地方。因此,在离焦的调整过程中,采用粗微调相结合的方法来实现快速调焦。粗调和微调清晰度的调焦全过程中离焦现象的曲线变化图如图2和图3所示。
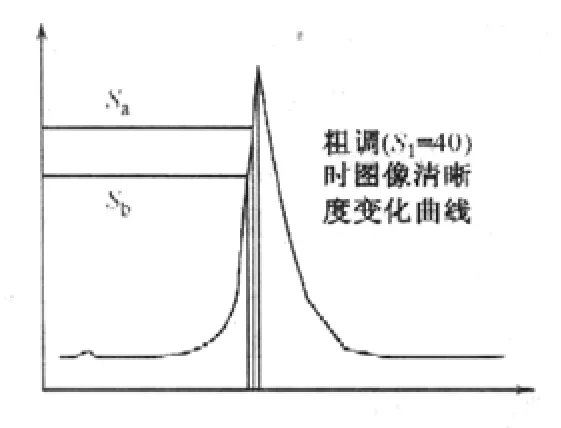
图2 粗调清晰度变化曲线
通过对粗调和微调状态下的曲线异同点定义了以下几种参数:
步距S:包括粗调步距S1和微调步距S2
显然,步距的大小直接影响着调焦的速度。当图像离焦较大时,粗调步距S1起作用,步进电机以最大的速度、适当的粗调步距S1找到SMD的最大值(即粗调时的图像最清晰点),但该位置图像可能不是最清晰的。然后,在以粗调步距S1找到的图像最清晰点位置附近再以微调步距S2寻找SMD的最大值(即微调时的图像最清晰点)。因此,通过合理设置粗调和微调步距,可以大大提高自动调焦的速度。
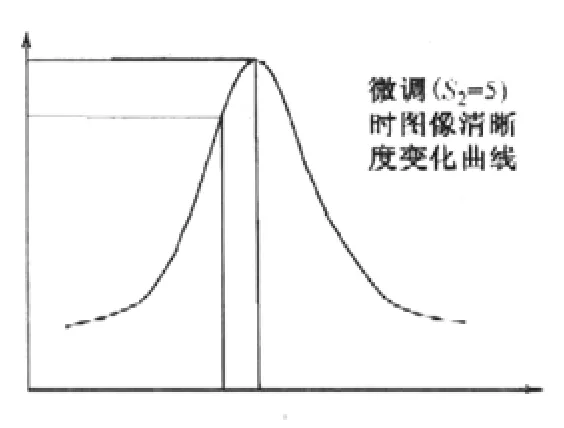
图3 微调清晰度变化曲线
但是,粗调和微调步距的大小的选取,要根据图像的精度和速度的要求、图像的信噪比、CMOS与CCD的分辨率等实际情况来决定。粗调步距S1不能太大或太小,实践证明,它可在10~100范围之间取值;同样,微调步距S2的选取范围可在1~10之间取值。在本文所设计的系统中,粗调和微调步距的的选取是 S1=40,S2=5。

这里的梯度,即相邻步距间的评价函数的差值的绝对值,它包括粗调梯度|Δ1|和微调梯度|Δ2|。由于梯度具有方向性,因而ΔSMD又可作为调焦方向参数。当ΔSMD>0时,表示步进电机从离焦状态向清晰状态方向运动;反之,当ΔSMD<0时,则表示步进电机从清晰状态向离焦状态方向运动。
值得指出的是,在实际应用中的噪声影响是一直存在的,它往往使评价函数产生了多峰性,如在图2中就有多个峰值的现象出现。为此,将会影响评价函数的评判结果,而这些干扰峰一般出现在SMD值较小的地方,并且峰值不会出现大的突变。由图2以S1=40步距的图像清晰度变化曲线可知,当由离焦状态到清晰状态再到离焦状态,梯度|ΔSMD|在接近清晰点时,出现大的突变。因此,通过设置梯度参数阈值,能有效地抑制由于噪声影响而导致清晰度评价函数的误判。
梯度参数是通过计算相邻步距间的评价函数的差值作为噪声滤波器,这相对于中值滤波、平均滤波的方法,该滤波方法的计算量很小。它在数字滤波方面减小图像处理工作量,从而提高了自动调焦的速度。
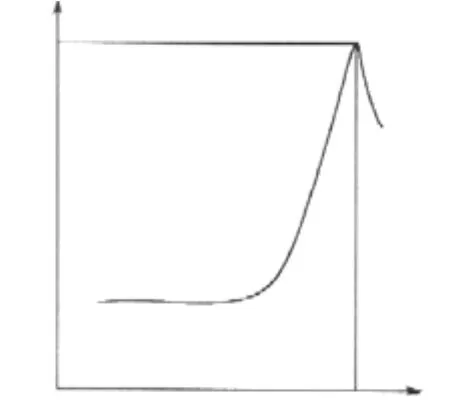
图4 粗微调焦清晰度变化曲线
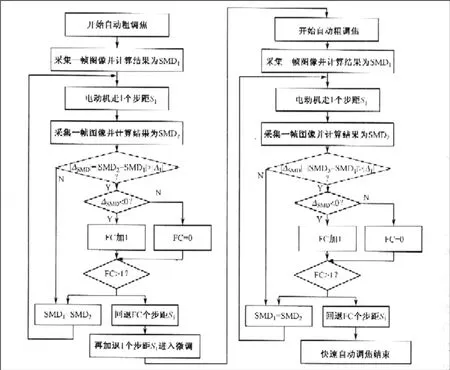
图5 快速自动调焦程序流程
梯度参数的选取,同样根据实际的图像的精度、图像的信噪比等来决定。实践也证明,粗调梯度|Δ1|可在0.50~10.00范围间取值;微调梯度|Δ2|则可在0.00~0.50之间取值。在本文所设计的系统中,粗调梯度|Δ1|=1.00,微调梯度|Δ2|=0,即可满足实际的需要。
连续ΔSMD<0时,计数器FC阈值的设置
当步进电机由离焦状态向清晰状态运动时,ΔSMD绝大部分是大于零的。当找到最大值时,若电机再继续运行,ΔSMD就会小于零。若出现连续的ΔSMD小于零的次数超过FC,则表示已经找到了最清晰点。本系统中,取值FC=2。
快速调焦系统的实现
在摄像物镜变倍或显微镜更换不同倍率的物镜时,快速自动调焦单元根据粗调步距参数S1、粗调梯度参敖|Δ1|进行调焦。根据|Δ1|设定的阈值,当超过该阈值时,表示离清晰点的位置不远了。这时,分析ΔSMD是否连续小于零,若连续小于零的次数大于FC,则Z轴步进电机向相反的方向走FC个步距S1,这样Z轴步进电机通过粗调找到了粗调时的最佳清晰点(可能不是最清晰点)。接着,快速自动调焦单元开始进入微调状态,为了可靠地找到由粗调时找到最佳点的附近能找到微调最佳的清晰点,在微调运作期间,快速自动调焦单元先使步进电机后退一个步距S1,然后从该点开始,以微调步距参数S2和微调梯度|Δ2|参数进行微调焦。并且,分析ΔSMD是否连续小于零,若连续小于零的次数大于FC,则Z轴步进电机向相反的方向走FC个步距S2,Z轴步进电机停止运动。这时,Z轴步进电机已通过微调找到了最清晰点,使整个快速调焦过程结束。粗微调焦清晰度变化曲线如图4所示。
根据对上面的实时快速调焦的分析,本自动调焦系统嵌入DSP中的程序设计的流程框图如图5所示。
结束语
由上可知,本文所述的自动调焦系统,其自动调焦精度≤±0.5μm;物镜变倍或转动对远近物体的实时跟踪调焦的响应时间均≤1.0s,是一个实时快速的自动调焦系统,因而完全可用于安防视频监控系统快速球中的一体化摄像机中。实践证明,所设计的指标不亚于国外最先进的自动调焦技术,可完全满足安防市场的需求。
作者为中国光电与安防技术专家、教授,本刊技术专家顾问