矿井交流提升机调速控制系统的研究
2011-10-31王金波季厌浮郭松林
胥 良,王金波,季厌浮,赵 杰,郭松林
(1.黑龙江科技学院电气与信息工程学院,黑龙江哈尔滨 150027;2.黑龙江科技学院机械工程学院,黑龙江哈尔滨 150027)
矿井交流提升机调速控制系统的研究
胥 良1,王金波2,季厌浮1,赵 杰1,郭松林1
(1.黑龙江科技学院电气与信息工程学院,黑龙江哈尔滨 150027;2.黑龙江科技学院机械工程学院,黑龙江哈尔滨 150027)
针对矿井提升机电动机难以实现平滑调速,调节性能差,调速过程中损耗了大量的转差功率等不足,提出了将斩波串级调速应用于矿井提升机电控系统的方案。相对于常规串级调速系统,系统在转子直流回路中加入了直流斩波器。利用整流桥和由 IGCT构成的直流斩波电路来连续无级改变电机转子回路电阻以实现平滑调速。控制方式运用具有电流负反馈与转速负反馈的双闭环控制,可以提高静态调速精度,并获得较好的动态特性。系统软件主要对电流环和转速环进行了描述。现场应用证明,该方案节能效果好,调速性能大大改善,不但有效地提高了系统的功率因数,而且还减少了装置体积和生产成本。
转差功率;斩波串级调速;IGCT;双闭环控制;功率因数
在矿山生产中,矿井提升机起着井上和井下的连接,保证矿井安全生产的重要作用,因此,提升机的调速控制显得尤为重要。
变频调速设备在低压小容量电机系统中应用比较广泛,而在高压大容量系统中存在成本高、体积大等问题,所以提升机电控系统中高压变频器没有得到普及。
针对这种情况,设计了矿井提升机交流电动机斩波串级调速系统。电动机等速运行时是平滑过渡到电动机自然特性的,电动机转子是短接状态,这时提升机的效率最高。本系统在现场得到良好应用,调速性能可靠、节能效果明显 。
1 绕线式电动机转子串级调速系统
在绕线式异步电动机转子回路中串入附加电阻后就可以改变转差率,从而实现调速,这种方法称为转子串电阻调速[1]。这种调速方法,因串入附加电阻而增加的转差功率以热能的形式被附加电阻消耗掉。
如果在转子电路中接入附加电动势,同样也可以通过改变转差率来实现调速,这种方法称为串级调速。这种调速方法,由于接入附加电动势而增加的转差功率回馈给电网或者回馈到电动机轴上。异步机的转差功率在电网、整流器、逆变器定子绕组和转子绕组之间进行传输,在此过程中因为有损耗而使系统效率降低,电机温升升高。在串级调速系统中通过调节逆变角来改变电机转速,因为逆变角是平滑连续可调的,所以异步电机的转速也能被平滑连续地调节。但是为了使电动机有足够的启动力矩,串级调速设备的参数要选得很大,造成材料的浪费,而且逆变角越大,消耗的无功功率也越大,电网的负担越重[2]。
2 新型斩波串级调速系统工作原理
2.1 新型斩波串级调速的方案
本文提出了新型斩波串级调速方案,在常规串级调速系统的转子直流回路中加入了直流斩波器,斩波器将整流器和逆变器连接起来[3]。
提升机中使用的交流电动机都是高压电动机,转子电压能达到 1000V,电流能达到 2000A,容量为 600~2000kW[4],所以斩波开关器件需要选用全控器件。
ABB公司的集成门极换向晶闸管 IGCT的可关断的电流大、工作电压高,单管可控制功率大,通态损耗低,开关周期能达到 0.001s,能够满足矿井提升机斩波串调系统的要求。
具有斩波控制的串级调速原理如图 1所示。该系统能够满足负载驱动的要求。
2.2 新型斩波串级调速系统工作原理
图1中的集成门极换向晶闸管 IGCT、电容 C和二极管D构成斩波升压电路。B是逆变变压器。二极管D的作用为隔离电压和阻止电流倒流。电感L1的作用为平波和储能。为维持逆变器的电流连续,设置了滤波电抗器。
斩波器在开关状态下工作。当斩波器导通时,转子整流电路被斩波器短路,电机转子在短路状态下工作,同时电容 C向逆变器放电,以维持 i2连续;当斩波器截止时,电机在串级调速接线状态下工作,电机向逆变器传递转差功率,同时电容 C充电。在交流电机转速一定时,改变 IGCT的开通占空比τ/T,就可以改变 i1的大小,也就改变了电动机的转矩 Te,进而达到调速的目的,其中τ为斩波器开关导通时间,T为斩波器开关周期。
为了减少逆变器从电网吸收的无功功率,提高系统的功率因数,逆变器可固定选取最小逆变角βmin,其不随转速变化而变化,但能使逆变器从电网吸收的无功功率减到最小。在高速段运行时,斩波式串级调速系统的功率因数改善很大,可接近电动机的自然功率因数,达到 0.8以上,比传统的串级调速系统高得多。
2.3 双闭环的控制方式
系统采用电流与转速双闭环控制方式,可以提高静态调速精度,并且得到良好的动态特性[6]。内环为电流自适应调节器,外环为速度调节器。
图1中的增量式光电编码器输出速度反馈信号Un,霍尔电流传感器输出电流反馈信号 Ui。ASR为速度 PI调节器,ACR为电流 PI调节器。PWM为脉宽调制器,用于产生斩波器的脉冲信号。
速度给定信号 Ug与速度反馈信号 Un比较后,偏差信号送到 ASR,ASR的输出再作为 ACR的给定信号 Ui*,Ui*与电流反馈信号 Ui比较后,偏差信号送到 ACR。ACR的输出电压 Uct作为控制电压加到 PWM后与 P WM内的载波相比较后输出脉宽调制脉冲Up。Up经隔离电路后就可以改变斩波器的占空比,从而控制转子电流,即通过调节电动机的转矩来调节转速。其中电流控制器的运算、速度控制器的运算以及 PWM斩波控制功能由电机控制专用芯片DSP-T MS320LF2407A处理器来实现。
3 IGCT吸收电路及驱动电路
提升机是一种往复运动的生产机械,加、减速频繁,所以半导体开关器件的工作电压要高,开关电流要大,通态损耗要低,开关频率要高。
针对矿井提升机的工艺特点,斩波开关器件选用 IGCT器件代替老式的可控硅斩波器控制方案[7],斩波周期可达 0.001s,系统不仅改善了调速性能,还可以克服晶闸管需强迫换流的缺点。由IGCT构成的斩波电路结构简单,控制简单便捷。
IGCT吸收及驱动电路框图如图 2所示,由电阻 R、电容 C和二极管 D组成吸收电路,其中二极管为快速恢复二极管,能够吸收 IGCT开关过程中的尖峰电压,以保护 IGCT防止被高电压击穿。由光接收器、光发射器和开关电源组成触发电路。当输入信号为低电平时 IGCT导通,为高电平时IGCT截止。
4 系统软件设计
在研究了系统的控制策略、控制算法和软件结构的基础之上,对系统中需要的程序进行了设计。根据需要,有主程序、中断处理程序、PI运算程序、电流环控制程序和速度环控制程序等[8]。
采用定时器 1中断标志来启动 A/D转换,转换结束后申请 ADC中断。图 3是 ADC中断处理子程序流程图。
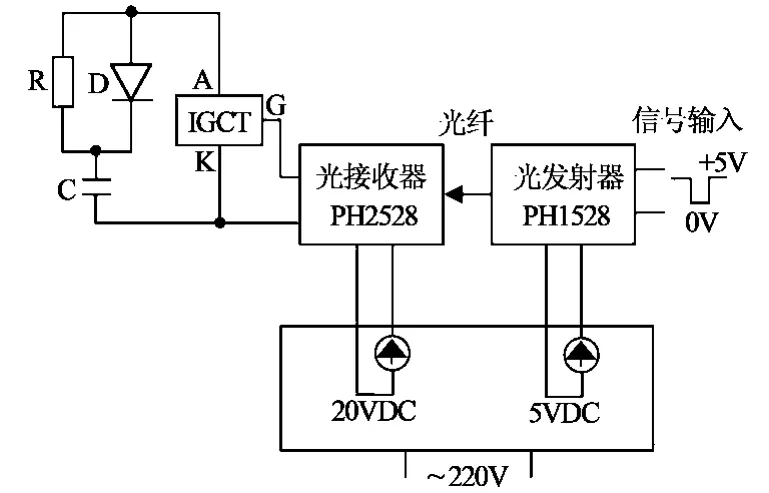
图2 IGCT吸收及驱动电路框图
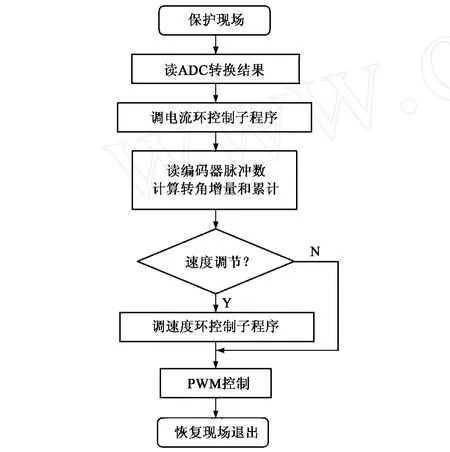
图3 ADC中断处理子程序框图
用DSP控制能够实现对交流调速的控制,用程序控制能够实现很多原来由硬件接线才能完成的工作,例如双闭环控制系统中的电流和转速的 PI调节过程。在启动时电流环工作,一旦速度出现超调,速度环就开始工作。正常运行后,电流环就实现对电流的跟踪调节,速度环实现对速度的跟踪调节。
电流采样和电流 PI调节在每个 PWM周期都进行一次,为了实现实时控制,电流采样周期与PWM周期要相同。
5 现场应用
本系统从鸡西市杏花矿应用情况来看,系统调速范围宽,转速可从 950~1350r/min连续可调。对阶跃输入信号,系统实现了实际转速对给定转速的跟踪,而且稳态时无偏差;在动态过渡时,系统的实际转速和阶跃给定信号之间有一些偏差。
斩波串级调速系统给定转速和实际转速曲线如图 4所示。

图4 斩波串级调速系统给定转速和实际转速曲线
6 结论
本文从现场应用实际需要出发,以改善矿井交流提升机的性能、提高矿井提升机的提升能力和自动化水平为目标,在克服传统串级调速系统的缺点的基础上,提出了对矿井提升机采用转子斩波串级调速控制运行的方案。
文中介绍了串级调速系统的控制方式和驱动电路等电路的工作原理,完成了系统的软硬件开发。系统推广到现场应用时,工作效率有了很大的提高,并且达到了节能的目的,还增强了系统的稳定性,具有较强的实用价值和发展前景。
[1]杨丽丹,夏勇波,薛建军,等.提升机高压电动机转子串电阻调速系统的现代化改造 [J].矿山机械,2010,38(14):99-101.
[2]牛艳奇 .矿井提升机主轴的静力学分析及其优化 [J].煤矿开采,2010,15(4):95-97.
[3]谢 军,孙忠献,温晓玲 .斩波串级调速系统主电路的分析[J].机电工程,2007,24(9):81-82.
[4]左东升,刘桂君,李云龙,等 .基于 SI MADYN D的矿井提升机电控系统改造 [J].金属矿山,2009(1):112-115.
[5]李皎洁,王致杰,刘三明,等 .基于模糊神经网络的提升机故障诊断系统 [J].中国煤炭,2009,35(12):67-69.
[6]Bingshu Wang,Ying Liu,Xiaodong Zhang.Research of Control Strategy of Internal Feedback Chop-wave Cascade Speed-regulation System[A].The 3rd ISSI International Conference[C].2009.
[7]王 磊,王中华 .西门子提升机上位机监测系统改造 [J].煤炭科学技术,2010,38(9):76-78.
[8]谭国俊,罗金盛,陶永正,等.基于 S7-300 PLC的提升机变频调速系统设计 [J].电气传动,2007,37(3):53-57.
[责任编辑:王兴库 ]
Research on Speed Control System of Alternating Lift for Mine
XU Liang1,WANG Jin-bo2,JI Yan-fu1,ZHAO Jie1,GUO Song-lin1
(1.Electric&Information Engineering School,Heilongjiang Institute of Science&Technology,Harbin,150027 China;2.Mechanical Engineering School,Heilongjiang Institute of Science&Technology,Harbin,150027 China)
In order to solve the problems in motor of mine lift including difficult stepless speed control,worse adjustment quality and large slip power loss,chopping cascade speed was introduced to be applied in electronic control system of mine lift.Direct current chopper was added into the direct current circuit of rotor in this system.Rectifier bridge and DC chopping circuit composed by IGCT was applied to continuous changing resistance of rotor circuit,thus stepless speed was realized.The control manner could improve static speed precision and obtain better dynamic quality by double closed loop control of current and speed negative feed.Soft ware of the system could calculate current circle and rotate speed.Application showed good energy conservation effect and speed quality.The system improved power factor and reduced device volume and production cost.
slip power;chopping cascade speed;IGCT;double closed loop control;power factor
TD534
A
1006-6225(2011)02-0085-03
2011-02-17
黑龙江省教育厅科学技术研究项目资助 (11541321)
胥 良 (1966-),男,黑龙江牡丹江人,教授,硕士,主要从事自动化和工业控制等方面的教学和科研工作。