高职院校工业机器人课程建设研究*
2011-10-30赵凤申李爱芹
赵凤申 李爱芹
(南通航运职业技术学院 江苏 南通 226010)
高职院校工业机器人课程建设研究*
赵凤申 李爱芹
(南通航运职业技术学院 江苏 南通 226010)
针对高职院校工业机器人课程教学存在的问题,应采用项目化教学法,设置合适的项目,融合理论与实践知识,以期取得良好的教学效果。
高职院校;工业机器人;课程建设
近年来,工业机器人在企业中的应用日益广泛,企业对技术人才需求迫切。由于高职院校以培养应用型人才为主,学生的知识基础、就业导向与本科院校不同,因此必须探索适合高职院校的工业机器人课程教学方案。
课程定位
工业机器人课程应定位于为企业培养能够完成工业机器人编程、操作、维保的应用型人才。课程应倾向于工业机器人,而非常见的基于单片机和嵌入式系统的移动机器人,或基于PC和多传感器的竞赛机器人;课程应具有明显的重实践、轻理论的特征,对工业机器人的理论知识可只做简单介绍,而对其操作、结构特性则要求学生能够深入理解,熟练掌握;课程应采用项目化教学模式,项目来源于工业实际案例,并应将相关理论知识融入项目教学过程中,做到实践与理论相辅相成。
本课程可采用安川SSF2000弧焊工业机器人,配备焊枪、送丝机构、数字焊机、空压机、真空吸盘、气动手爪等外围设备,配套动态模拟软件MOTOSIM-EG和通讯软件MOTOCOM-32,并采用北京博创“创意之星”组合式机器人套件辅助工业机器人课程教学。
工业机器人理论知识的分解与取舍
在传统的工业机器人课程教学中,多注重理论知识讲解,由于工业机器人造价高、数量少、维护难等原因,实训环节所占比重不大。而理论知识繁杂,有坐标变换、矩阵理论、微积分等高等数学的内容,运动规划、轨迹控制掺杂过多的算法,内容抽象,与企业具体应用脱节,学生学习起来难度大,兴趣不高,影响了教学质量。为了既能够满足企业要求,又能使学生有一定的理论知识和发展后劲,应将理论知识分解并融入项目教学过程中。具体而言,可将工业机器人认知、结构、电气控制、正运动学、示教理论、编程、维保等知识渗透到项目教学中,而对电机运动控制、路径规划、逆运动学、虚拟示教、离线编程只做简单介绍。
项目化课程设计
结合工业机器人的企业应用状况,设计项目如图1所示。下面对项目做详细介绍。
工业机器人认知 学生对机器人的认知比较片面,大多停留于人形机器人、智能机器人层面,缺乏对工业机器人的多种结构形式和各种应用场合的了解。本项目通过视频、图像、实训设备等,使学生了解工业机器人、深海机器人、空间机器人、军事机器人、仿生及人形机器人、娱乐与服务机器人等在各种场合的应用。对于机器人的工业应用着重讲解其各种结构形式及应用场合,如SCARA结构、PUMA560结构、直角坐标机器人等,通过该项目使学生对机器人学科有全面认识,提高学生的学习兴趣。
工业机器人的基本操作 本项目由学生操作示教盒在不同坐标系下运转工业机器人,并在动态模拟软件MOTOSIM-EG中完成虚拟机器人的加载和控制。通过关机坐标系下的运动使学生了解PUMA560机器人的结构形式,通过直角坐标系了解轨迹控制的概念,并简要介绍用户坐标系和工具坐标系的实用意义。教师简单讲解工业机器人的系统构成、各部分原理和作用,如控制柜(主控制器、轴控制器、焊接控制板、变频器、IO板等)、数字焊机、气罐、送丝结构、交流伺服电机等,并可讲解弧焊、点焊、钎焊的差异及其应用。
汽车车门点焊实训 本项目由学生编制程序,驱动工业机器人模拟点焊作业。由于点焊设备较重,对机器人负载能力的要求较高(一般在165kg级别),使得机器人造价高,不适合高职院校使用。本项目采用弧焊机器人加外部IO模拟点焊操作,并使用动态模拟软件加载虚拟点焊枪模拟点焊过程。本项目涉及的知识点为:工业机器人的程序录入与示教再现方法、点焊原理及其应用、外部IO的连接与控制、点位运动模式下的路径规划方法等。

图1 课程项目图
汽车消声器弧焊实训 本项目由学生设定合适的焊接参数(电流、电压等),使用起弧、收弧和圆弧运动指令,完成汽车消声器两端的正圆形焊缝的焊接。通过本项目使学生对工业机器人的实际焊接过程有亲身体会,在焊接过程中教师应做好安全防护工作。涉及的知识点为:圆弧运动命令模式下的路径规划、正逆运动学、弧焊原理、焊接参数对焊接质量的影响等。
马鞍形焊缝焊接实训 马鞍形焊缝多出现在圆管与圆管“T”字形连接接口,在压力容器等设备中比较常见。其特点为大厚度、深坡口,需要多层多道连续焊接,多采用焊接专机或机器人加外部轴的方式进行。由于本实训室机器人未配备外部轴,故可采用近似方法,即在焊缝上设置若干关键点作为运动目标点,使用机器人点位运动或直线运动命令做近似的轨迹拟合,由于关键点间距较小,加之弧焊对精度要求不高,本方法基本能够满足企业应用要求,并可使用动态模拟软件加载虚拟机器人和外部轴完成作业。通过本项目使学生了解焊接专机和外部轴的应用场合,了解多轴控制器的作用,提高编程能力,熟练掌握工业机器人操作方法。
药盒装箱码垛实训 本项目要求学生使用真空吸盘将药片(由塑料块模拟)装入包装盒,装满后将药盒放至相应位置,然后继续装药操作。本项目程序比较复杂,需要使用外部IO扩展、子程序调用、系统变量等要素,有一定的综合性。相关知识点为:真空吸盘原理和使用、外部IO扩展和控制、机器人在食品包装行业的应用等。
啤酒装箱搬运实训 本项目主要是将空啤酒瓶装箱后搬运,需要气动手爪和真空吸盘配合使用,手爪完成装箱,真空吸盘完成搬运。本项目在编程上比上个项目偏难,基本知识点与上个项目相同。通过本项目强化学生编制复杂程序的能力。
AGV设计编程与调试 AGV(自动导引车)系统作为柔性装配系统、物流自动化系统,可适应现代汽车制造业柔性化、敏捷化、智能化、信息化的发展趋势,工业机器人在汽车生产中主要完成点焊、弧焊、装配、喷涂等工作,AGV和工业机器人相结合,可大大提高劳动生产率。学生使用组合式机器人套件,选用相应的传感器,自主设计四轮移动小车,如图2所示,使用C语言或者图形化编程软件完成程序设计,使得小车能够沿着指定路径前进,实现自动导引功能。本项目使学生了解AGV的原理和应用,组装AGV以提高动手能力,通过对小车编程了解单片机开发流程,培养使用C语言编制复杂程序的能力,了解传感器的原理及与主控制器的连接方法,掌握直流电动机的调速方法。
机器人结构设计及示教系统实现 一般而言,工业机器人是一个封闭的系统,用户只能通过示教盒或PC机软件完成工业机器人的编程控制,其D-H参数也不公开。因此,仅依靠工业机器人无法验证正逆运动学、电机控制理论。为克服此难点,本项目要求学生使用组合式机器人套件设计PUMA560结构形式的机器人,如图3所示,利用主控制编程实现示教盒功能,即能够控制该机器人的关节运动,并能够记录和复现运动轨迹。该机器人的关节由开放通讯协议的舵机驱动,主控制器能够与舵机双向通讯,设定或获得关节角度。由于该套件可提供各构件的三维模型,学生可以导入UG、Pro/E完成虚拟装配,通过运动仿真了解工业机器人的正运动学理论。通过该项目使学生深刻理解PUMA560形式机器人的结构,了解工业机器人离线编程、虚拟示教与示教盒示教的区别和联系,掌握使用C语言编制复杂程序的过程,掌握舵机的原理和控制方法,能熟练地使用UG、Pro/E,教师能够通过该开放式机器人讲解正逆运动学并由学生验证。

图2 AGV小车图
机器人常见故障与维护 本项目主要讲述工业机器人常见故障处理,如碰撞、线缆损坏、焊接异常等,常规维护如防尘、防潮、防静电,末端执行机构、夹具、焊枪等的换装,加注润滑油的方法等。由于工业机器人数量有限,本项目主要由教师通过图片、视频等方式讲解,学生在教师的指导下进行拆装。此外,还应强调规范化的故障诊断和排除流程。
教学方案与成绩评价
本课程采用项目教学法,每组安排4~6人,考虑到工业机器人数量有限,程序录入占用时间较长,可采取以下方式:(1)利用虚拟机器人与实体机器人互补,一部分学生操作实体机器人,一部分学生利用模拟软件操作虚拟机器人;(2)组合机器人与工业机器人互补,项目顺序不必拘泥于图1所示,如一部分学生可先进行项目8和项目9,利用组合式教学机器人即可完成教学。
学生完成本项目课程后,能够掌握工业机器人操作、编程、维保技能,熟悉工业机器人及相关设备在自动化生产中的应用,了解相关理论知识,即可认为实现了教学目标。在教学过程中,应注意过程评价,主要着眼点为动手能力、团队协作能力、创新能力、纪律性及职业素质,在课程结束后,可由学生选择某一项目提交研究性报告,以考查其综合应用知识的能力和文书写作能力。
教学实践证明,本课程采用项目教学法,紧贴企业应用,淡化理论,强化实践,并使二者有机结合于项目中,取得了良好的教学效果。尤其是引入组合式教学机器人,可以弥补工业机器人封闭性的不足,增强学生的参与性,使得课堂教学生动活泼,寓理论于实践,对工业机器人课程教学具有很好的促进作用。
[1]段铁群,石广远,于丹,杨克飞.重型压力容器马鞍形焊缝自动焊机插补算法与仿真[J].焊接学报,2010,31(1):63-66.
[2]郭云绯,刘俏,杨如正.AGV系统大幅提高汽车行业技术水平[J].物流技术与应用,2009,(7):92-94.
[3]戴光平.焊接机器人故障诊断及维修技术[J].电焊机,2003,33(6):51-54.
G712
A
1672-5727(2011)03-0039-02
赵凤申(1982—),男,河南商水人,硕士,江苏省南通航运职业技术学院讲师,研究方向为应用电子技术、机器人技术与教学。
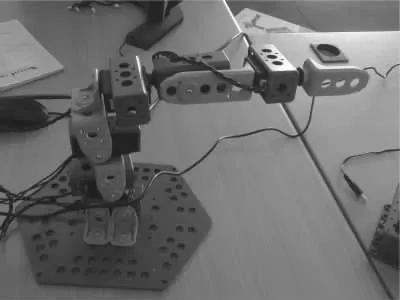
图3 组合式工业机器人图
