浅析将顺序功能图转换为梯形图的四种方法
2011-10-30何小丽重庆化工职业学院自动化系400020
何小丽 重庆化工职业学院自动化系 400020
浅析将顺序功能图转换为梯形图的四种方法
何小丽 重庆化工职业学院自动化系 400020
梯形图是最常用的编程语言。顺序控制设计法是设计梯形图程序最常用的方法。顺序控制设计法是首先根据控制过程画出顺序功能图,将顺序功能图转为梯形图。文中以西门子公司s7-200系列PLC编程软件STEP-7的梯形图编程语言为例,说明将顺序功能图转换为梯形图的四种方法。
梯形图;顺序功能图;起保停电路转换法;步进指令转换法;移位寄存器指令转换法;置位复指令转换法
引言
S7-200 PLC控制的小车一个工作周期的动作要求如下:
1)按下启动按钮SB1(I0.0),小车电机正转(Q0.0),小车第一次前进,碰到限位开关SQ2 (I0.2)后小车电机反转(Q0.1),小车后退。
2)小车后退碰到限位开关SQ1 (I0.1)后,小车电机停转。5S后,第二次前进,碰到限位开关SQ3(I0.3),再次后退。
3)小车第二次碰到限位开关SQ1(I0.1)后,小车停止。准备下次启动。
如图1所示:
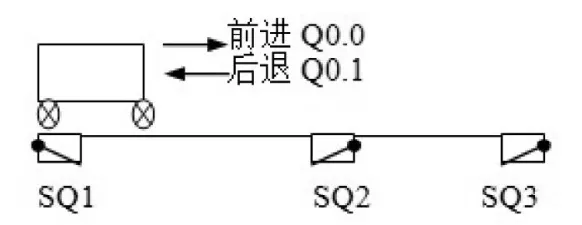
图1 小车运动示意图
分析小车运行过程可知,用顺序功能设计法很容易解决这个问题。绘制顺序功能图如图2。
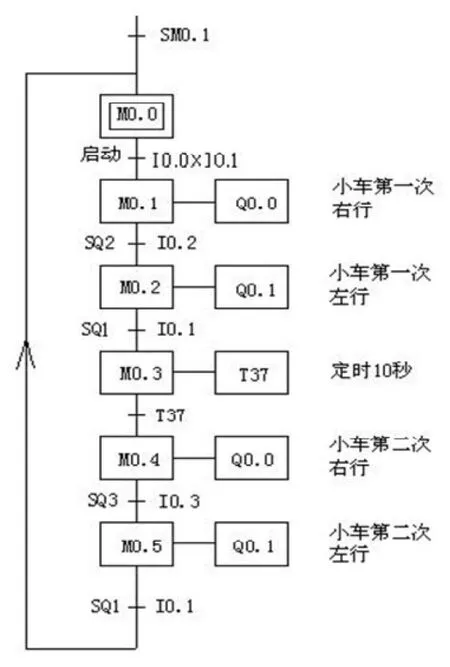
图2 顺序功能图
STEP-7编程软件不支持顺序功能图语言,所以,要小车按控制要求运行,还需将顺序功能图转换为梯形图。下面分别介绍四种方法将图2转换为梯形图。
1 起保停电路转换法
起保停电路仅仅使用与触点和线圈有关的指令,无需编程元件做中间环节,各种型号PLC的指令系统都有相关指令,加上该电路利用自保持,从而具有记忆功能,且与传统继电器控制电路基本相类似,因此得到了广泛的应用。这种编程方法通用性强,编程容易掌握,一般在原继电器控制系统的PLC改造过程中应用较多。由图2 可见,顺序功能图中是以步作为主线,所以在将顺序功能图转为梯形图这一环节中,定义步是关键。步的定义遵循以下结构:
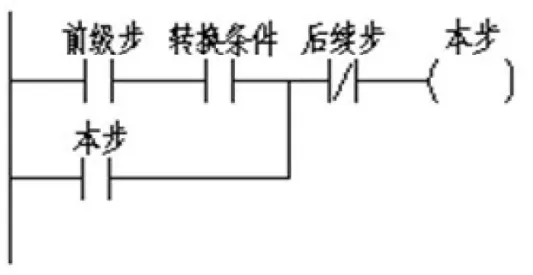
图3 起保停电路基本结构
这个控制过程总共有六步,每一步的定义都符合图3的结构,所以只要知道了前级步、后续步,转换条件、本步的定义,步的网络就得到了。然后再用步带上动作;在定义M0.0的网络里并联上SM0.1这个初始化脉冲,程序就设计出来了。
2 置位复位指令转换法。
置位复位指令转换法,是用前级步对应的中间继电器的常开触点与转换对应的触点或电路串联,作为使所有后续步对应的中间继电器置位和使所有前级步对应的中间继电器复位的条件。
激活各步继电器M0.0~M0.5的梯形图结构简单归纳如图4所示。
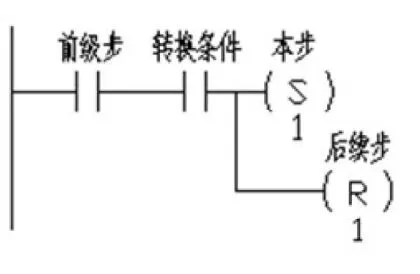
图4 置位复位指令转换法的基本电路结构图
步定义好后,带上动作,程序就设计出来了。
3 步进指令转换法
步进指令是专门为顺序控制设计提供的指令,它的步只能用顺序控制继电器S来表示。把图2中的M0.0~M0.5用顺序控制继电器S0.0~S0.5代替,对每步中间继电器定义结构如图5所示。

图5 步进指令实现顺序控制
步的定义结束后,带上动作,程序就设计好了。这种编程方法很容易被初学者接受和掌握,对于有经验的工程师,也会提高设计效率,程序的调试、修改和阅读也很容易,使用方便,程序也较短,在顺序控制设计中应优先考虑,该法在工业自动化控制中应用较多。
4 移位指令转换法
从图2可以看出,在M0.0~M0.5各步中只有一个步在某时刻有效而其他步都无效,显然可以用移位指令实现控制。图8为用移位指令编程时的梯形图,采用字节MB0的前六位M0.0~M0.5代表6个步。用移位指令主要是对移位脉冲、赋初值、数据复位等几种情况的处理。如图6——图9所示。

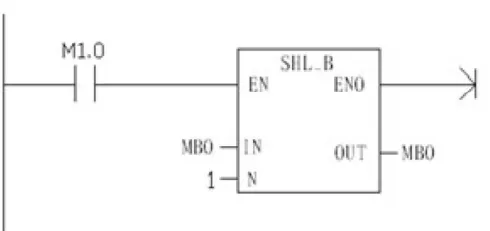
图9 移位指令
用图6至图9的程序,将步定义完成,然后带上动作,程序就设计出来了。该方法设计的梯形图看起来简洁,所用指令也较少,但对较复杂控制系统设计就不方便,使用过程中在线修改能力差,在工业控制中使用较少,大多数应用在彩灯顺序控制电路中。
5 结束语
实践表明上述四种转换方法很容易被初学者接受和掌握,用它们可以得心应手地设计出任意复杂的顺序控制程序。
[1]廖常初主编.P L C编程及应用.北京:机械工业出版社.2 0 0 7年
[2]张万忠主编.可编程控制器入门与应用实例.北京:中国电力出版社
10.3969/j.issn.1001-8972.2011.11.019
