宁钢3#铁路道口自动报警系统技术改造
2011-10-17胡伟忠
胡伟忠 王 辉
(宁波钢铁有限公司物流部,浙江 宁波 315807)
宁钢3#铁路道口自动报警系统技术改造
胡伟忠 王 辉
(宁波钢铁有限公司物流部,浙江 宁波 315807)
宁钢铁路道口自动报警系统采用磁电传感器点式道口自动信号控制方式。调车车列在反向磁电传感器上方运行时,经常性启动道口误报警,本文介绍:通过改造自动报警系统的启动控制电路及取消控制电路,彻底消除道口误报警问题。
误报警;轨道电路;磁电传感器;信号;改造
宁波钢铁有限公司为贯彻“低成本、高效率”的经营策略,采用磁电传感器点式道口自动信号控制方式,对厂内三处铁路平交道口进行自动报警技术改造,将原人工看守道口改为无人看守道口。其中3#道口跨越两条平行铁路线,周围有交叉渡线一组,调车作业方式复杂,须满足两台机车同时平行调车作业要求,加上该处公路运输大型特种车辆来往较多,较易引起铁路运输安全事故,纳入宁钢重点设备管理范畴。同时,该处由于受到站场布局的制约,调车车列在反向磁电传感器上方运行时,经常性启动道口误报警。严重影响道口通行能力。尤其机车在牵引两辆鱼雷罐车由南向北调车作业时,司机考虑2#道口的安全情况以及兼顾过磅作业需要,制动动作比较频繁,不仅极易引起误报警,而且会造成栏杆“非正常”动作,栏杆升起后,过4~5s时间会启动落杆。如:车列后轮在出清道口,启动升杆的瞬间,同一车列前轮轮缘刚好在反向磁电传感器上方又启动误报警,即在较短的时间段内,解锁报警-又启动报警,因为报警与启动落杆时间(9~10s)的对应关系,去掉5s的升杆时间,栏杆升杆到位后会马上启动落杆,有些时候几乎在同一时间发生解锁-启动报警动作,去掉5s的升杆时间,此种情况在升杆后,最短会在4~5s的时间内开始启动落杆,比原设定从启动报警到开始落杆的9~10s时间,少4~5s。一般行人的认知程度,只要车列过了道口栏杆升起后,不管报警是否继续,就直接往前走,这种落杆延时时间的不够极易造成将人员、车辆关进道口的险肇事故。因此,只有消除误报警,才能确保该道口安全运行。
一、磁电传感器点式道口自动报警系统工作程序
道口自动报警系统结构,如图1所示。当车列进入SJ或XJ磁电传感器上方时轮缘正向切割磁钢磁力线,传感器产生磁电感应信号,接近控制器(接收器)切断24V控制电源,主机启动报警。车列过完SJ后延时报警80~90s时间。车列通过道口约3秒钟后,到达控制器DD(音频无绝缘轨道电路YCDKSWB2闭路式控制器发出信号,通过YCGDK-1型轨道中转控制盒)给主机送出脉冲控制24V取消电压,主机自动解除报警。
二、误报警启动原因
磁电传感器点式道口自动信号控制设备存在缺陷:接近控制设备对车辆运动速度有一定要求,车列在≤1公里以下速度行驶或者轮对在磁电传感器上方制动作业时接近控制器不能辨别车列运行方向,会切断接近控制电压,启动误报警。
由于三号道口所处位置比较特殊(如图2所示),为满足调车作业需要,司机考虑二号道口的安全情况以及兼顾过磅作业需要,每班都有因不可避免的制动措施,引起轮缘正向切割反向磁钢的磁力线使接近控制电压断电,启动道口误报警。
三、改造措施
去除原无人看守自动报警系统接近控制设备(包括磁电传感器、接近控制器等)和DD1~2无绝缘轨道电路设备(YCDKSWB2闭路式控制器、YCGDK-1型轨道中转控制盒等);采用铁路信号微机连锁控制设备原有的硬件及其他继电器设备替代无人看守自动报警系统的磁电控制系统和无绝缘轨道电路控制设备的功能:由信号开放和接近轨道电路的占用启动道口报警;由道口区段的轨道电路继电器执行保持报警及取消报警工作。以此,彻底消除误报警现象。
(一)接近报警启动控制电路原理
接近报警启动控制过程,由报警主机、第一路报警电路和第二路报警电路构成,如图3所示。
1、报警主机:
(1)9(+)为接第一路接近报警点输入的直流24V控制电压端口(大于12V);平常有电,如断电则报警,并自锁或延时报警;
(2) 10(+)为接第二路接近报警点输入的直流24V控制电压端口(大于12V);平常有电,如断电则报警,并自锁或延时报警;
(3)16(+)平常没有电压;如收到直流24V控制电压(大于12V),则立即报警,即保持报警;如断电,则立即复原,不会有延时;
(4)1(+)为外部到达取消点输入的直接控制电压接线端口(大于12V)。取消第一路接近报警;
(5)3(+)为外部到达取消点输入的直流控制电压接线端口(大于12V)。取消第二路接近报警。
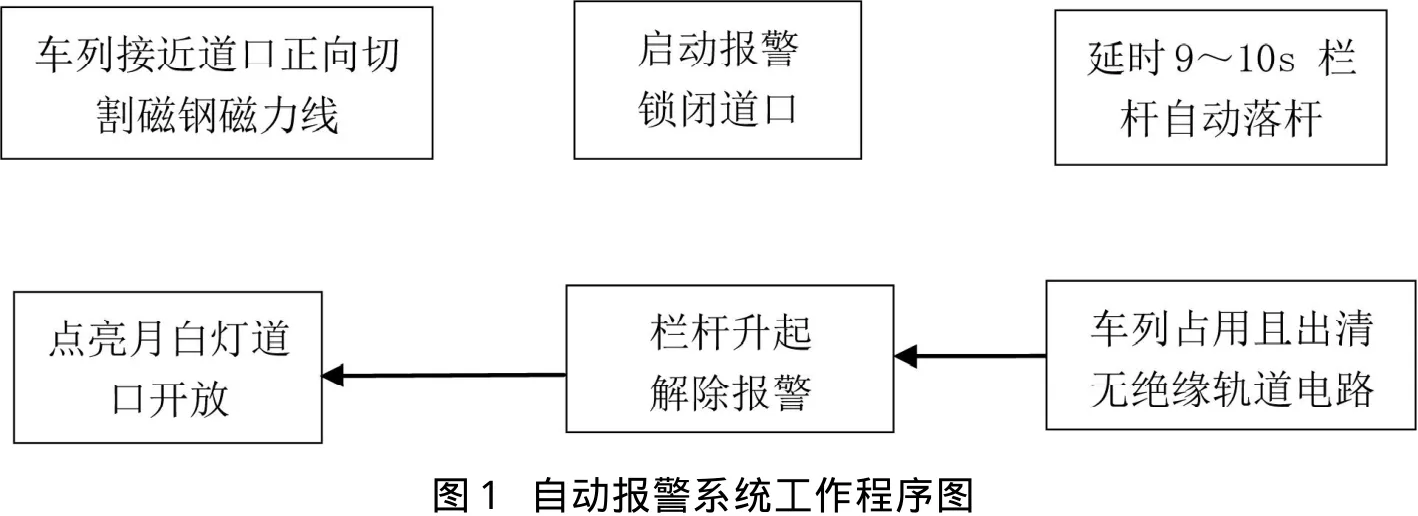
图1 自动报警系统工作程序图
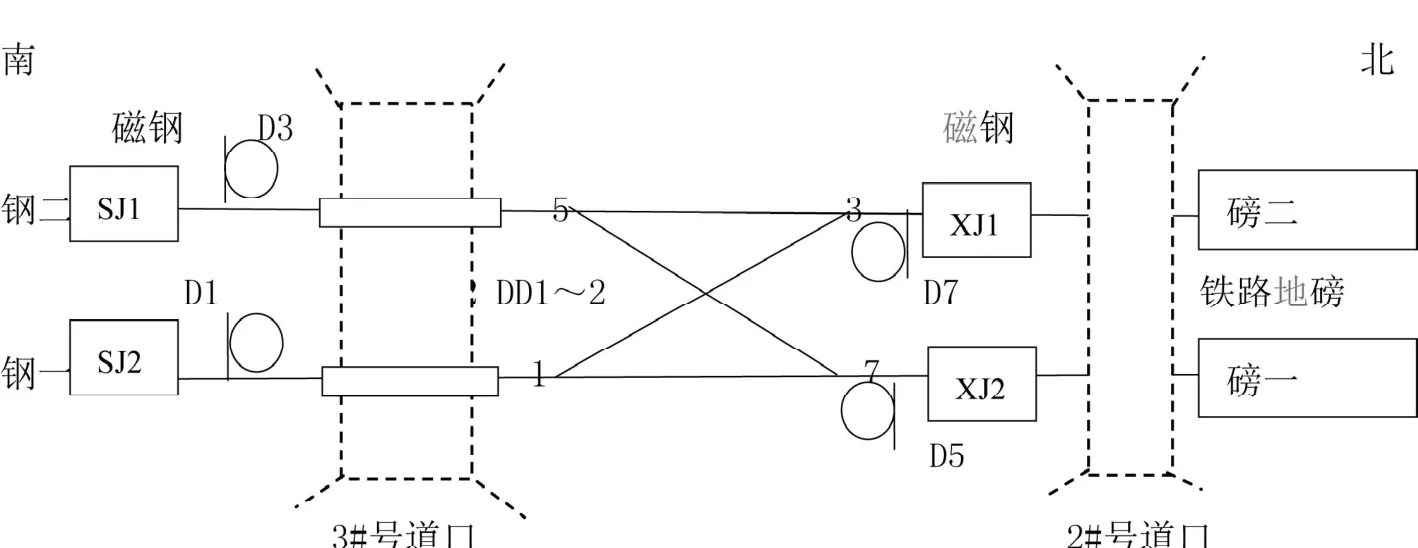
图2 设备分布图

图3 接近报警启动控制电路图
2、第一路接近报警:利用D1XJ励磁13接点的断开与D1JGJ失磁62接点的断开,切断给主机的24v控制电压,启动钢一的接近报警;由D5XJ励磁13接点断开与D5JGJ失磁62接点的断开,启动磅一线的接近报警;
3、第二路接近报警:利用D3XJ励磁13接点的断开与D3JGJ失磁62接点的断开,切断给主机的24v控制电压,启动钢二的接近报警;利用D7XJ励磁13接点断开与D7JGJ失磁62接点的断开,启动磅一线的接近报警;
除以上四种允许启动接近报警以外,其他单一的接近区段占用或信号开放,KZ控制电压必须保持与主机光电耦合器导通,禁止启动报警。如:D1信号开放,D5JG占用。其导通电路:KZ→D1JGJ61-62→D5XJ11-13→01→到主机的光电耦合器。同理,其他状态电路沟通方式类似,在这里不再累述。
(二)报警取消电路及保持报警控制原理
报警取消电路及保持报警控制原理,如图4所示。
1、车列占用1-7DG区段,使1-7DGJ失磁,一方面通过63接点接通保持报警电源,其电路:KZ→1-7DGJ61-63→D1(二极管)1-2→04输出保持报警电源,即道口区段占用必须始终保持报警;另一面接通其1-7FDGJ的励磁电源,使该继电器动作吸合,同时给RC电路充电,为取消由D1、D5方向启动的报警做好准备。其电路:FDGJ继电器励磁电路KZ→1-7DGJ61-63→1-7FDGJ1-4→KF,充电储能电路KZ→1-7DGJ61-63→R1-2→C→KF;在车列出清1-7DG区段的时候,利用1-7DGJ即时励磁和1-7FDGJ的缓放瞬间(1~2s)送出脉冲电压,取消第一路的接近报警,开放道口,其电路:KZ→1-7DGJ61-62→1-7FDGJ11-12(缓放1~2s)→05给主机送出一个取消电压;
2、车列占用3-5DG区段(同理,其电路与上述相似这里不再详细累述),使3-5DGJ失磁,一方面通过63接点接通保持报警电路,另一面接通其3-5FDGJ的励磁电源,使该继电器动作吸合,同时给RC电路充电,为取消由D3、D7方向启动的报警做好准备。在车列出清3-5DG区段的时候,利用3-5DGJ即时励磁和1-7FDGJ的缓放瞬间(1~2s)送出取消电压,取消第二路接近报警,开放道口。

图4 报警取消电路图
(三)其他改进措施
1、采用在输出端并联电阻(3.3k 5w)的方法,消除输给主机电路中的感应电压(图中未画出)。
2、尽可能遵循故障倒向安全的设计原则。接近失电报警,进入道口区域送电保持报警,出清道口区域瞬间提供一个脉冲取消电压,解除报警,开放道口。
四、结论
通过对自动报警控制系统的技术改造不仅彻底消除了误报警,而且还解决了机车走交叉渡线反位时,道口延时解锁的问题、 80s锁闭时间不报警的安全隐患问题以及交叉渡线折返调车作业时,保持连续报警的问题。通过改造该道口的通行能力及安全运行系数得到进一步提高。目前,该3#自动报警道口已经连续运行6个月,没有出现任何故障及安全隐患,取得了良好的效果,达到预期目标,并且为公司循序渐进推进无人看守道口的综合管理工作提供了硬件保障。
[1]工业企业道口安全标准.GB6389-1997.中国标准出版社
[2]铁路区间道口信号设备技术条件.GB10494-89.中国铁道出版社
[3]铁路站内道口信号设备技术条件.GB10493-89.中国铁道出版社
[4]铁路信号设计规范TB10007-2006.北京全路通信信号研究设计院.中国铁道出版社
[5]道口信号维修技术细则TB.中国铁道出版社
10.3969/j.issn.1001-8972.2011.005.091
