日常抓举物体动作分析与优化研究
2011-10-17姜德义
姜德义,张 艺
重庆大学资源及环境科学学院安全技术及工程系 400044
日常抓举物体动作分析与优化研究
姜德义,张 艺
重庆大学资源及环境科学学院安全技术及工程系 400044
动作研究是科学管理技术研究的一项重要内容,通过动作研究可以改进和完善动作的方法和顺序,可以用较少投资或不增加投资即可对现行生产系统进行不断改进。抓举物体动作是生产活动中最常见、最典型的动作,对它进行研究与优化,对提高生产效率和减少职业病有十分重要的作用。本文以抓举物体动作为例,在建立人体数学模型的基础上,对抓举动作进行简化分析,结合动作优化的原则,给出生产活动中抓举物体的优化动作。
抓举动作;动作分析;动作优化
中图分类号:X914
1 引言
动作研究是对作业动作进行细致研究,使动作更简化、合理,从而提高生产效率,减少职业病的一种方法。它是科学管理技术研究的一项重要内容,最先是由费雷德里克·泰罗倡导和发起的。19世纪泰罗在费城米德瓦尔钢铁厂当机械工人期间,他把动作研究的理论成果用到了实际生产中,大大提高了生产效率;20世纪吉尔布雷斯夫妇对泰罗的动作研究方法进行了改进和完善,动作研究方法在实践应用中最著名的就是吉尔布雷斯对砖瓦匠工作的仔细审视,并对他们的动作进行了优化设计,从而提高了砖瓦匠的工作效率,减少了员工的职业病。由于吉尔布雷斯在动作研究方法上的重要贡献,后人称他为“动作研究之父”。他还提出了动作的经济原则,是用于分析和改进操作动作,并将动作经济性原则分为三大类:关于人体的运用、操作场所的布置以及工具设备。后来以巴恩斯为代表的其他学者在其研究基础上做了改进和完善,将动作经济原则总结为三大类:有关使用身体、作业场所布置以及工具和机械设备的设计原则[5-7]。
抓举物体动作是生产活动中最常见、最典型的动作,对它进行研究与优化,对提高生产效率和减少职业病有十分重要的作用。现阶段,国内也有很多学者对此进行了研究。陈育等[8]在对女子中杠铃的运动轨迹的分析与研究中,指出缩短整个抓举过程的时间,是使动作干净利落也是省力的一个重要环节;孙砺[9]在对下蹲式抓举技术动作的力学原理与解剖学分析中,阐明了抓举技术动作的一般原理和内在规律,提出了改进技术动作方法的理论依据;秦硒[10]指出抓举运动“近”、“快”、“低”三原则是对抓举运动中最重要的几个力学问题的一种定性描述。任景萍等[11]对运动员动作技术的合理性做出了诊断和评价,为抓举技术的理论和训练提供了理论参考。
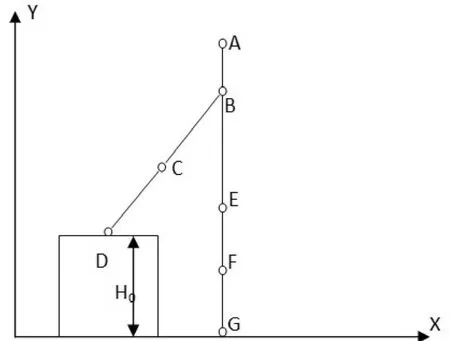
图1 人体数学模型[1-4,12-14]
2 抓举物体动作的分析
2.1 人体数学模型的建立
把人体简化为如图1所示,并把他放在直角坐标系中进行分析讨论。
图中,A、B、C、D、E、F、G分别表示人体的各个关节。其中:
A到B的长度表示人的头顶到肩的垂直距离。
B到C的长度表示人的上臂长。
C到D的长度表示人的前臂长。
B到E的长度表示人的躯干长。
E到F的长度表示人的大腿长。
F到G的长度表示人的小腿长。
H0表示物体最高表面离地面的高度。
2.2 抓举动作的分析
假设人体数学模型中的左臂与右臂等长、左腿与右腿等长,我们把抓举物体动作简化为只弯腰抓举物体、只下蹲抓举物体两种情况,除以上两种动作以外其他关节不进行动作。假设物体的重力为F;人体的重力为G;地面对人体的支持力为N;地面对人体的摩擦力忽略不计;前后方向,物体重心线到人体两脚所构成的支撑面中心的垂直距离为X0,人体重心线到人体两脚所构成的支撑面中心的垂直距离为X1。
于是我们可以得到以下分析:
①只弯腰抓举物体动作分析

图2 只弯腰抓举动作示意图
人体上下方向受到的合外力:

人体腰部承受的最大弯矩:

②只下蹲抓举物体动作分析

图3 只下蹲抓举动作示意图
人体上下方向受到的合外力:
人体腰部承受的最大弯矩:

3 抓举物体动作的优化
3.1 优化概述
生产活动中,许多工厂对工序动作的安排,往往是在产品刚开始生产时安排一次,此后除非出现重大问题很少进行变更。工作效率的提高一般要根据操作人员的动作熟练程度而定,随着动作的逐渐熟练,操作人员对作业动作习以为常,完全在无意识中进行动作。其实这样的做法潜藏着极大的效率损失,也带来了更多的危险。操作人员认为理所当然的动作组合,其实都存在停滞、无效动作、次序不合理、不均衡(如:太忙碌、太清闲等)、浪费等不合理现象。这些在思想麻痹状态下的动作对产品的性能和结构没有任何改变,自然也不能创造任何附加价值,但却使生产效率降低。
动作优化就是在进行动作研究及分析后,消除不必要的动作;合并可以同时进行的动作;重新安排不合理的动作顺序;简化复杂动作,以此来提高动作的效率,减少职业病。结合动作优化的这四项基本原则,可以提出动作优化的一般步骤,如图4所示。
3.2 抓举动作优化
①从产生职业病的角度出发
结合前面抓举物体动作分析,在成功抓举物体的全过程中,人体必须要保持平衡状态,也就是说人体前后方向所受的合外力必须为零,同时人体绕垂直轴的转动合力矩也必须为零。所以在抓举物体的过程中,物体的重心和人体的重心的运动轨迹要与两脚所构成的支撑面中心的垂直线尽量接近,即公式中“X”值应尽量小,这样才能获得稳固的支撑和平衡。并且只有这样才能使腰部所受到的弯矩最小,即腰部所受到的损害最小。

图4 动作优化一般步骤
②从动作效率的角度出发
尽量缩短动作路线是动作合理化的重要对策。缩短动作路线就是减少动作的距离,让人体参与活动的肢体在尽可能小的幅度内完成。人的肢体活动可分为五级:手指动、手腕动、前臂动、上臂动、身躯动。一般认为前三级动作属经济动作范围,而后两级动作的挥动幅度较大,属不经济的范围。也许,在一次动作中节约的时间及能量是微不足道的,但在大量反复进行的动作中,即使动作距离只有微量的减少,其带来的效益却是非常惊人的。特别适合长期进行抓举动作的人员,如搬运工、砖瓦工等。
抓举物体动作的突出特点是身体重心降得越低,就越能举起更大的重量。因为在物体行程不大的情况下,只有迅速地降低人体的身体重心,才能将物体置于胸前或支撑在头顶伸直的两臂上。
结合动作优化的重要对策和抓举物体动作的突出特点,我们可以得出抓举物体动作优化的原则:在保证最大用力的前提下,应尽量缩短物体的行程。这一原则的意义在于具体的体现了人体用力的经济性,物体的运动行程缩短了,就可以用同样的力量举起更大的物体重量,根据做功的公式可知,减少S的数值可以有效地减少人体的做功从而可以降低人体的能耗,提高人体的动作效率。
根据前面两种数学分析模型,两种动作都能使人体重心降低,但都不能让重心迅速降到最低,也就不能保证最大用力。因此,只有在两种动作相结合的情况下,才能保证最大用力。也只有在这个前提下,缩短了物体行程才能提高动作效率。
但是不管在现实中还是理论上,每一次成功的抓举动作都不止这么简单。因此,在进行抓举动作优化时,我们不仅要考虑提高动作效率,也要考虑动作给人带来的损害,只有把这两个方面综合起来,我们才能提高日常活动中的生产效率和减少职业病。所以,我们必须将两种简单的抓举动作综合起来,通过比较分析,对抓举物体的动作进行优化。由于抓举动作是一个连续不断的动作,后一个阶段的动作是以前一个阶段的动作为基础的。因此根据动作优化的原则和步骤,我们可以得到优化后的动作及步骤,如图5所示。

图5 优化动作及步骤
4 结论
本文应用动作研究的思想及方法,结合对动作研究的经验,对抓举物体动作进行了简化分析,并且得到了以下结论:
①通过假设简化,建立人体数学模型如图1。
②把抓举物体动作简单分成了两类,建立了各自的数学模型(如图2,图3),并进行了简单的分析。
③从产生职业病和提高动作效率两方面考虑,结合动作优化的思想,给出了抓举物体的优化动作及步骤。
但是,随着知识经济时代的到来,动作研究也存在很多局限性,主要体现在两个方面:一方面,现实社会中,现场工作对人的智能含量要求很高,有些动作要求操作者必须具有一定的专业知识进行综合分析才能操作正确。但动作研究主要是研究操作流程、人机操作和人的动作的合理性,而没有研究操作者完成岗位上各种操作所具有的知识运用能力。另一方面,动作研究使工作变得规范,使操作人员丧失了独立发挥的个性。在有些特殊工作中操作者需要有自由发挥、独立思考的空间,所以动作研究要使操作人员动作合理、实用,还必须考虑操作人员的个性。这是在以后的动作研究中需要加强的。
[1]孔庆华.人因工程基础与案例[M].北京:化学工业出版社.2007:169-175
[2]欧阳文昭,廖可兵.安全人机工程学[M] .北京:煤炭工业出版社.2002:97-118
[3]吴青.人机环境工程[M] .北京:国防工业出版社.2009:45-52
[4]袁修干,庄达民,张兴娟.人机工程计算机仿真[M].北京:北京航空航天大学出版社.2005:78-82
[5]龚学全,黄烈,陆振华.工作研究在机械加工过程中的应用及效果[J].装备制造技术.2005,4(5):26-30
[6]陈卫增.应用于现代制造业的工作研究方法的改进[J].工艺与工艺装备.2005,6:73-74
[7]贵文龙.工作研究方法在企业中的应用分析[J].工业工程与管.2006,4:123-124
[8]陈育,王军.对女子中杠铃的运动轨迹的分析与研究[J].安徽体育科技.1999(4):42-43
[9]孙砺.下蹲式抓举技术动作的力学原理与解剖学分析[J].太原大学教育学院学报.2010(1) :12-14
[10]秦硒.从力学角度看抓举运动的“近”“快”“低”三原则[J].体育与科学,1998,(2) :22-24
[11]任景萍,王惠棣,叶鸣.对抓举动作技术身体各环节运动特征的研究[J].首都体育学院学报.2008(6) :18-20
[12]吴昊,王修信,郝艳.举重序列图像杠铃动力学参数的提取与分析[J].广西物理.2008,1 (29):7-9
[13]Roland Kadefors, Mikael Forsman.Ergonomic evaluation of complex work: a participative approach employing videocomputer interaction, exemplied in a study of order picking. International Journal of Industrial Ergonomics,2000,25:435-445
[14]刘延柱.关于刚体姿态的数学表达[J].力学与实践.2008,1(30):98-101
Research and Optimization of Snatch Action in Daily Activities
Jiang Deyi,Zhang Yi
Chongqing University, College of Resources and Environmental Science, Safety Technology and Engineering, 400044
The action methods and order can improve and perfect by the action research which is an important part of scientific management techniques, and the current production system can be improved with less investment or do not increase the investment.The most common and typically action is the snatch action. It’s very important to promote production efficiency and reduce the disease by research and optimized it. Take the snatch action for example,on the basis of establish mathematical model,optimize action was given out in daily activities,which combined to the principle of optimize action and with simple analysis of the snatch action.
snatch action; action research;action optimization
620.2040
A
10.3969/j.issn.1001-8972.2011.005.013
国家创新研究群体基金(No. 50621403);国家自然科学基金资助项目(No. 51074198)
姜德义,男,1962,教授。主要从事安全工程、采矿工程、岩土力学方面的研究。
