一种基于80C51单片机控制的寻迹小车设计
2011-09-29彭一准姜小宝庄明加保和平
彭一准,姜小宝,庄明加,保和平
(1. 天津科技大学电子信息与自动化学院,天津 300222;2. 天津大学电气与自动化工程学院,天津 300072;3. 深圳比亚迪汽车股份有限公司,深圳 518118)
一种基于80C51单片机控制的寻迹小车设计
彭一准1,姜小宝2,庄明加3,保和平1
(1. 天津科技大学电子信息与自动化学院,天津 300222;2. 天津大学电气与自动化工程学院,天津 300072;3. 深圳比亚迪汽车股份有限公司,深圳 518118)
寻迹小车采用光电传感器来识别白色路面中央的黑色引导线,通过80C51单片机实现对转向舵机和驱动电机的PWM控制,使小车实现快速稳定地寻线行驶.分模块阐述了寻迹小车的原理、软硬件设计及制作过程.针对路径特点对寻迹小车的方向控制和速度控制提出了舵机分级转向、速度分段控制的解决方案.实验表明,寻迹小车能够较快速、平稳地完成对各种曲率引导线的寻线行驶任务.
单片机;PWM控制;寻迹;光电传感器
Abstract:The tracing car was designed,which identify the black guide line in central of the white road by photoelectric sensors. M icrocontroller 80C51 was used to control steering motor and driving motor to drive the intelligent car fast and stably along w ith the guide line. The principles,make processes and software design of the tracing car in sub-modules were described. Based on the characteristics of the tracing path an ideal solution about classified steering gear and segmented speed control was proposed. Experiments show that the tracing robot can complete the task went along w ith the guide line more quickly and smoothly.
Keywords:m icrocontroller;PWM control;tracing;photoelectric sensor
随着人们对安全性的日益重视,汽车的智能化已成为研究的重点之一.智能汽车作为一种智能化的交通工具,体现了车辆工程、人工智能、自动控制、计算机等多个学科领域理论技术的交叉和综合,是未来汽车发展的趋势[1].自动寻迹行驶是汽车智能化的一个方面,目前已有很多关于这方面的研究工作:如采用磁传感器来检测路径的无人驾驶研究工作[2–3],但采用磁传感器需要在路面预埋磁钉,会对路面造成一定的损坏;有采用CCD摄像头作为路径传感器实现无人驾驶的研究工作[4–5],然而CCD 摄像头一般价格较为昂贵,且需要对数据进行复杂的转换和处理;也有采用光电传感器来检测路径实现自动寻迹的研究工作[6–8],光电传感器具有结构简单、安装方便、对道路无损坏和价格低廉等特点.但很多关于这方面的研究都只停留在介绍相关原理,并没有阐述具体的元器件和制作过程.本文详述了一种基于80C51单片机控制的寻迹小车的寻迹原理、总体设计、软硬件设计及制作过程.
1 总体设计
采用与路面颜色有较大差别的线条作引导线,寻迹小车能够自动检测到引导线,并沿此引导线行驶.本文设计的寻迹小车采用光电传感器来识别白色路面中央的黑色引导线,通过单片机控制转向舵机和驱动电机,从而实现寻迹小车快速稳定地寻线行驶.为保证寻迹小车在寻线的过程中具有良好的操纵稳定性,本文对寻迹小车的运动模型进行分析,针对路径特点对寻迹小车的方向控制和速度控制提出了较为理想的舵机分级转向、速度分段控制的解决方案.
寻迹小车分为6个模块,系统组成如图1所示.
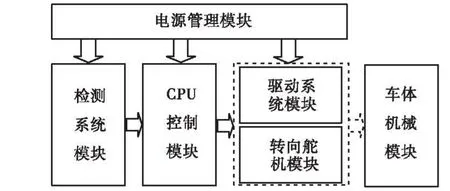
图1 寻迹小车系统框图Fig.1 Block diagram of the tracing car
其工作过程是:安装在小车前部的光电传感器检测路面上黑色引导线的位置,并将测得的信息输入到CPU控制模块进行分析处理;CPU控制模块根据处理结果输出控制指令,分别对转向舵机和驱动电机进行PWM控制,通过两者的相互配合实现寻迹小车左转、右转、前行、加减速等,从而实现寻迹小车快速平稳的寻线行驶.
2 硬件设计和制作
2.1 硬件设计
2.1.1 CPU控制模块
寻迹小车的CPU控制模块应满足以下要求:采集7路光电传感器的检测信号,根据采样信号输出相应的舵机、电机控制信号,实现寻迹小车沿轨迹行驶.综合考虑性能要求和经济性等因素,CPU采用80C51单片机.
单片机资源分配如下:P0.0—P0.6用于控制1号传感器—7号传感器的信号指示灯;P1.0—P1.7为1号传感器—7号传感器的信号输入接口;P2.1—P2.2为驱动电机PWM控制信号接口;P2.3为转向舵机PWM控制信号接口.
2.1.2 检测模块
检测模块由反射式光电传感器、电位器和运算放大器LM 393组成,如图2所示.反射式光电传感器利用黑色引导线与白色路面对发射端发出光线的反射度不同,使接收端分得的电压不同.运算放大器LM 393的输出端电压信号直接输入控制单片机的传感器信号输入接口.
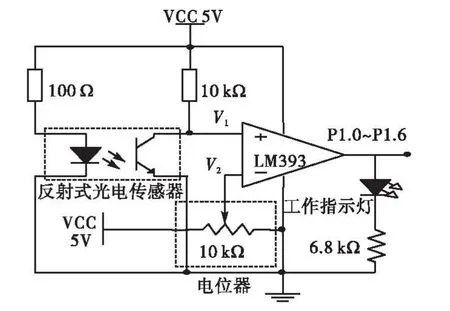
图2 传感器连接电路Fig.2 Sensor circuit
2.1.3 驱动模块
驱动模块包括驱动电路和驱动电机.如图3所示,驱动电路采用H型双极性可逆PWM控制电路,可以实现寻迹小车的前进、后退、加减速等功能.由于单片机输出的PWM控制信号功率太小,不能直接驱动MOS管工作,因此,在H桥驱动电路两边各加入一个三极管8050NPN作为功率放大管(图3中虚线框所示).单片机通过P2.1和P2.2输出的PWM控制信号经过三极管放大之后,便可驱动MOS管工作,控制电机的正反转.

图3 H型双极性可逆PWM控制电路Fig.3 H-reversible PWM control circuit in bipolar
因为直流电动机具有优良的速度控制性能,输出转矩较大,可直接拖动负载运行,驱动电机采用直流电动机.选用RS-380SH型直流电动机(额定电压7.2,V,最大功率可达26.5,W).
2.1.4 转向舵机模块
舵机是一种位置伺服的驱动器,适用于需要角度不断变化并要求可以保持的控制系统[9].基于单片机的舵机控制方法具有简单、精度高、成本低、体积小的特点[10].本文所设计的寻迹小车采用Futaba S3010型舵机,具有高稳定、高转速、反应灵敏、转动角度大等特点.舵机采用PWM信号进行控制,直接用P2.3接舵机信号线,产生一个以10,ms为周期的PWM控制信号,通过调整PWM控制信号的占空比来改变舵机的转向.
2.1.5 电源管理模块
电源管理模块包括电池和稳压电路.电池采用输出为7.2,V的镍镉电池组,为了防止电机、舵机等大功率器件在起动时对其他器件带来干扰[11],寻迹小车各主要模块均采用单独供电的方式,其电源管理分配图见图4.

图4 电源管理分配图Fig.4 M anagement of power distribution
电池组直接给驱动电机供电,采用三片稳压芯片LM 2940分别给检测系统模块、转向舵机模块、单片机供电.
2.2 寻迹小车制作
车体采用东莞市博思电子数码科技有限公司G768型车模.
2.2.1 驱动电机的安装
驱动电机安装在小车后部,与后轮轴用齿轮传动,电机轴与后轮轴之间的传动比为9∶38(电机轴齿轮齿数为18,后轮轴齿轮齿数为76).
齿轮传动机构对寻迹小车的驱动能力有较大的影响,调整的原则是:两传动轮轴要保持平行,齿轮间的配合间隙要合适,不能有卡住或迟滞现象;调整好的齿轮传动噪音小,并且不会有碰撞类的杂音.
2.2.2 舵机的安装
舵机是具有较大延迟特性的对象,其延迟与其转角大小成正比,如果能使舵机转过的角度越小,车轮转过的角度越大,则会大大提高舵机的响应速度,而这不仅与舵机的安装方式有关,也与舵机输出臂的长度有关系,输出臂越长越有利于提高响应速度,但过长的输出臂容易使舵机达到其堵转力矩[9].对各种安装方式进行比较,找到了一种较好的安装方式,在此安装方式下的最优输出臂长7,cm,可使整个小车在寻迹转向中更加精确快速.
2.2.3 传感器的布置
反射式光电传感器在小车前部“一”字形排布,考虑到弧度信息采集的连贯性,采用非均匀布局,非均匀布局的理论依据是等角度分布原则,即先确定“一”合适的定点,从定点依次等角度画射线,射线与传感器水平线相交的位置即为传感器的位置[12].如图5所示,传感器4为两前轮轴的中心,中间黑线即为路径中央黑色引导线,黑色引导线的宽度为25,mm,为保证寻迹小车总能检测到黑色引导线,传感器间的最大间隔应比该宽度要小;另外,因为寻迹小车系统中舵机从接受信号到控制输出约有110,ms的延迟,将电路板伸出一定的长度(约7,cm)固定在小车的前方,可以提前检测到引导线信息,从而对延迟进行补偿,这有利于减少小车运动过程中的振荡,使小车平稳地跑过弯道[11].

图5 传感器布局图Fig.5 Diagram of sensor layout
此外,安装时各部分电路板大小应与车体相适应并布置在恰当的位置,以便使小车的重心位于有利于小车平稳行驶的位置.
3 系统软件设计
3.1 整体控制方案
图6为寻迹小车的系统控制框图.引导线是小车跟踪的目标,小车通过检测系统检测出小车相对于所要跟踪路径的相对位置,再将此信息输入到单片机,单片机将此信息进行处理后将控制命令输出到舵机和驱动电机,以控制小车的位置和速度,保证小车快速平稳地沿预先设定好的路线行驶.
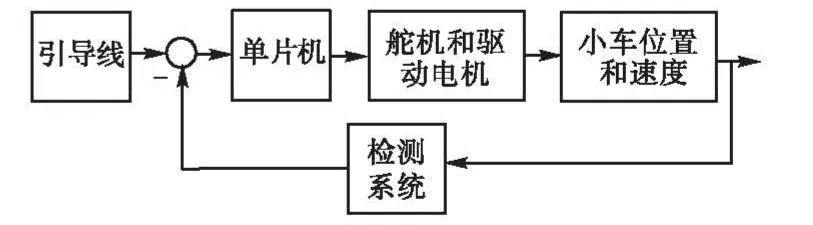
图6 系统控制框图Fig.6 Block diagram of the control system
3.2 转向舵机的分级控制
由于跑道各点的转弯半径具有不确定性,因此,需要设计分级转向程序,使小车在不同转弯半径处实现不同角度的精确转向.图7为转向舵机的控制流程图.

图7 转向舵机控制流程图Fig.7 Flow chart of steering gear’s control
跑道的弯度信息由小车前方的传感器反映,单片机上电初始化之后,开始对各个传感器按顺序进行扫描,根据传感器信号确定转角.若所有光电传感器都为低电平,则说明没有传感器检测到黑线,表示寻迹小车脱离轨迹.此时不改变舵机转向,同时单片机输出控制信号,使直流驱动电机停止转动.
可以看出,反射式光电传感器越多,则分级转向越精确,寻迹小车行驶越流畅;但同时要注意电路线束布置和传感器之间干扰.
3.3 驱动电机的分段控制
采用分段速度控制的方法,将跑道弯度分成4段,通过传感器检测跑道弯度信息,将检测到的信息送入单片机处理,单片机根据速度控制算法得到相应的PWM控制信号,对驱动电机的转速进行控制,从而控制寻迹小车的速度.驱动电机的PWM周期为1,ms.
图8为驱动电机转速控制流程图.为了防止小车在起步时加速过慢,在起步时加全电压,一段距离之后才对其进行速度调整.在小车行驶过程中,单片机按流程图顺序对各传感器进行连续扫描,当1号或7号传感器为高电平时,表明小车处于大弯道处,根据控制算法调整PWM控制信号占空比为85%,使小车减速,以免其冲出跑道;同理,当2或6、3或5号传感器为高电平时,分别调整PWM控制信号占空比为90%、95%;当4号传感器为高电平时,单片机应输出占空比为100%的PWM控制信号,使小车全速前进.当小车冲出跑道时,所有传感器都为低电平,单片机输出占空比为5%的PWM控制信号,并控制驱动电机瞬时反转,从而使小车快速减速,然后迅速停下.由此可见,双极性驱动模式,大大缩短了智能车减速的时间.
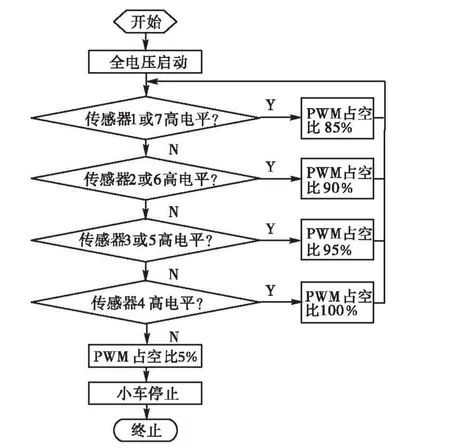
图8 驱动电机转速控制流程图Fig.8 Flow chart of drive m otor’s speed control
3.4 实验
实验表明,在不同曲率的路段上(曲率半径分别为0.5、1、2 m),经过多次对驱动电机速度和舵机转向的参数进行调整后,小车能在直道以2,m/s,在弯道以0.8,m/s的平均速度,平稳地在图9所示测试路径上行驶.
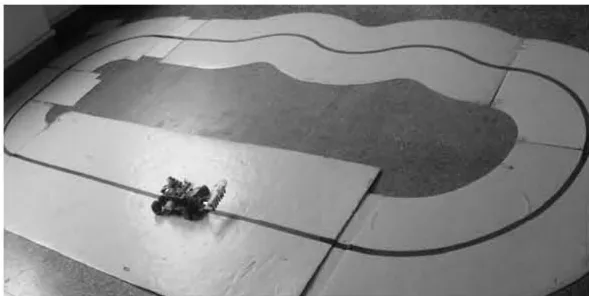
图9 寻迹小车测试路径图Fig.9 Test path of tracing car
4 结 语
本文设计了一种寻迹小车系统,并详细阐述了寻迹原理、软硬件设计及制作过程.寻迹小车系统的硬件设计和软件设计均采用模块化设计原则,使得设计易读懂、易修改、易扩充.
另外,传感器的灵敏度可根据光电传感器和引导线间的距离来调节,但是易受环境光影响且前瞻距离不长,影响小车在弯道的速度.在调试过程中,需要根据路径曲率的不同,通过软件调整驱动电机速度和舵机转向角度,以确定最佳值.该寻迹小车系统的设计方案可供寻迹类小车整体设计时参考.
[1] 王伟,陈慧,刁增祥,等. 基于光电导航无人驾驶电动汽车自动寻迹控制系统研究[J]. 汽车工程,2008,30(2):137–140.
[2] 王春燕,吴超仲,丁振松,等. 基于磁道钉导航的智能公路车道保持硬件控制系统研究[J]. 公路交通科技,2003,20(1):129–131,135.
[3] 杨利兵,严新平,吴超仲,等. 磁道钉导航控制系统研究[J]. 武汉理工大学学报,2002,26(4):454–456.
[4] 孙涵,任明武,唐振民. 基于机器视觉的智能车辆导航综述[J]. 公路交通科技,2005,22(5):132–135.
[5] 皮燕妮,史忠科,黄金. 智能车中基于单目视觉的前车检测和跟踪[J]. 计算机应用,2005,25(1):220–223.
[6] 郭忠山,魏泽鼎,杨雪,等. 基于AT89C52控制的寻迹小车设计[J]. 机电工程技术,2008,37(03):61–63.
[7] 高月华. 基于红外光电传感器的智能车自动寻迹系统设计[J]. 半导体光电,2009,30(1):134–138.
[8] 宋雪丽,王虎林,王毅. 基于单片机的寻迹机器人的系统设计[J]. 仪表技术,2009(4):36–38.
[9] 严金辉,裘有斌,张星. 汽车转向和舵机安装方式的数学模型[J]. 机电设备,2008(6):5–8.
[10] 杨明,程磊,黄卫华,等. 基于光电管寻迹的智能车舵机控制[J]. 光电技术应用,2007,22(1):50–53.
[11] 陈东,尚巍. 基于光电管的智能车模自动循线控制系统[J]. 机械与电子,2007(10):32–36.
[12] 蔡公华,洪乃刚. 一种智能车控制算法的研究[J]. 电子科技,2009,22(6):10–13.
A Design of Tracing Car Based on Control of 80C51 M icrocontroller
PENG Yi-zhun1,JIANG Xiao-bao2,ZHUANG M ing-jia3,BAO He-ping1
(1. College of Electronic Information and Automation,Tianjin University of Science&Technology,Tianjin 300222,China;2. School of Elecrical Engineering &Automation,Tianjin University,Tianjin 300072,China;3. BYD Auto Co.Ltd.,Shenzhen 518118,China)
TP242.6
A
1672-6510(2011)01-0055-05
2010–07–12;
2010–10–22
天津科技大学引进人才科研启动基金资助项目(20070433)
彭一准(1974—),男,湖南人,讲师,yzpeng@126.com.