嵌入式微处理器的沥青砂浆车液压调平系统的设计
2011-09-25蔡钟山张认成杨建红
蔡钟山,张认成,杨建红
(华侨大学机电及自动化学院,福建泉州 362021)
嵌入式微处理器的沥青砂浆车液压调平系统的设计
蔡钟山,张认成,杨建红
(华侨大学机电及自动化学院,福建泉州 362021)
设计一种基于嵌入式微处理器的沥青砂浆车液压自动调平系统.其检测装置采用双轴水平传感器(角度传感器),控制器采用飞利浦的LPC2114微处理器,执行机构采用阀控液压缸.嵌入式微处理器LPC2114采用两点调平的算法,实现对沥青砂浆车的液压自动调平.实验结果表明:采用两点调平的方法,在调平精度为±0.2°的前提下,调平效率高、稳定性好.
两点调平;嵌入式;微处理器;液压自动调平;沥青砂浆车
沥青砂浆车搅拌平台上都装有添加料自动称量系统,如果搅拌平台不水平,将导致称量系统无法进行精确计量,高速铁路无渣轨道的质量也得不到保证.因此,研究一种快速、准确、安全的砂浆车调平系统是十分必要的[1-2].传统的调平方式主要是通过水准仪来检查平台的水平状态.它采用多点调整方式,依靠人工作业完成,耗时长且调平精度差.目前,工业上用得较多的调平方式主要是基于可编程控制器(PLC)和单片机的液压调平系统.PLC在工业上应用广泛、编程简单,但选用PLC为处理器将导致系统的成本增加,且PLC对浮点运算等一些复杂算法的编程实现较为困难;而单片机虽然价格低廉,但其抗干扰能力差,不适合工业上的应用[3].针对沥青砂浆车在高速铁路上作业过程中对搅拌平台水平度的要求,本文提出一种成本低、稳定性好的基于嵌入式微处理器的沥青砂浆车液压自动调平系统.
1 系统设计

图1 调平系统整体框架Fig.1 Framework of leveling system
1.1 整体构架
调平系统的整体框架,如图1所示.系统主要由检测装置、控制器和执行机构3部分组成.其中:检测装置是采用双轴水平传感器(角度传感器);控制器采用飞利浦的LPC2114微处理器;执行机构采用阀控液压缸.
使用LPC2114微处理器的2路A/D转换器对角度值进行检测,利用UART1与PC机进行串口通信,将角度值通过串口发送给PC机进行数据保存,通过4路的PWM输出;经过低通滤波电路输出模拟电压值[4],通过信号调理电路放大后对执行机构进行控制.
系统选择的A T201-SIA-EGOT系列倾角传感器是4~20 m A的双轴电流输出倾角,综合考虑调平精度,选择其调平量程为-8°~+8°.它适合静态和慢速变化的动态测量,不适用于快速变化的动态测量,所测量的载体水平或者俯仰角度变化速度在5°·s-1以下的效果良好,而超过10°·s-1会产生角度输出失准的情况[2].
系统的控制平台主要由液压系统组成,4个带有自锁功能的液压支腿为执行机构——液压缸.其升降由对应的比例电磁阀控制的,微处理器输出模拟量给比例电磁阀,以控制比例电磁阀的开度,从而控制液压缸的升降,实现砂浆车的调平.
1.2 控制电路
控制电路主要包括信号转换和信号调理电路.信号转换电路通过一个100Ω的精密电阻将从倾角传感器采集到的电流信号转换为电压信号,并作为A/D转换器的输入信号.为了保证系统的稳定,信号调理电路采用两级放大电路,一级放大使用OP07芯片,将电压放大到0~10 V之间,然后采用型号为YKGR-D Y18的比例放大器进行二级放大,将0~10 V的电压放大到6~18 V用于驱动执行机构.
2 调平算法的选择
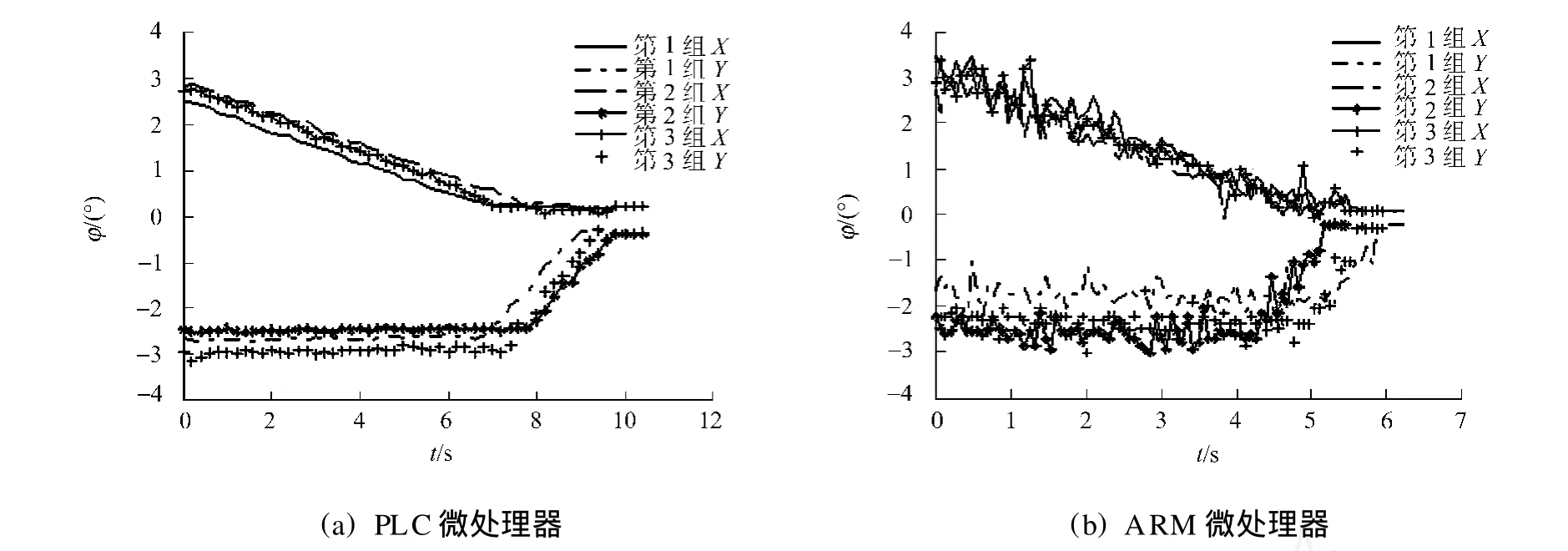
调平目标是使平台的角度参数α和β的绝对值小于1个预置精度S′,即要求|α| 一点调平理论上可以很好实现两个水平方向的耦合,精度较高.但在实际应用中,其最低点与最高点的高度差以及由高度差推导出最低退升高时间都难以精确得到,从而导致在调平过程中出现调平的不精确性.当系统控制不当时有时也会导致砂浆车的倾斜,严重时甚至翻车,即稳定性不够;当要求分别实现对2个方向不同角度精度时,一点调平也很难满足,且调平时间长. 两点调平是采用“先Y后X”的调平策略.即在水平角度满足调平范围的前提下,首先对Y方向进行调平,满足|β| 三点调平采用实时比例跟踪调平方法.即在每次跟踪周期内进行逐次逼近,可以实现解耦[6].但其跟踪周期的大小很难控制,没有理论的支持,只能凭经验进行设置,不同的水平角度的跟踪周期不一致,调平过程中也容易引起过调,即调平时间长. 通过几种调平方法的比较并综合考虑各自的优缺点,最终系统选择两点调平算法[7]. 表1 调平实验数据表Tab.1 Table of the leveling experimental data on PLC 选取角度值满足α>0,β<0,设置初始倾斜角度在2°~3°,设定调平精度S′为0.3°,采用 PLC, ARM(Advanced RISC Machines)处理器经过两点调平,分别进行多组实验.分别选取3组不同初始角度的α,β值,其初始条件和实验结果,如表1,图2所示.表1中:α0,β0为实验初始角度;αl,βl为调平后角度;t为调平时间. 从图2可知,在平台初始角度基本一致的前提下,采用ARM微处理器进行两点调平的调平效果要比使用PLC微处理器的处理效果好. 在调平精度设为0.3°的前提下,使用嵌入式微处理器的调平系统在X和Y方向的调平精度比使用PLC的调平系统提高近0.1°.当调平精度要求更高时,嵌入式微处理器的调平系统具有更高的精度.在实验条件基本一致的情况下,PLC调平时间为9~10 s,而嵌入式微处理器将调平时间缩短到5~6 s,调平时间缩短至原来的一半,而且调平效果有了改善. 从图2可以发现,图2(b)中的曲线比图2(a)出现轻微的振荡.这是由于平台在正常调平过程中会出现轻微振荡,而出于硬件和软件设计方便需要,ARM处理器所设定的采样周期要比PLC采样周期短,导致ARM采样得到的数据直接反应出平台的抖动情况.因此,出现轻微振荡是采样周期的选取引起的,不会对实验结论造成影响. 图2 调平实验结果Fig.2 Results of the leveling experiment 采用32位ARM工业级芯片LPC2114作为系统的微处理器,其处理速度快且稳定性好,在系统庞大的情况下,其成本要比PLC低好多倍. 在调平精度满足的前提下,采用两点算法具有调平速度快、稳定性高的特点.此外,ARM采用C语言编程可以实现较复杂的程序编程,为更高精度的调平算法实现提供可能,弥补PLC难以实现复杂算法编程的缺陷.基于嵌入式微处理器的调平系统,能满足沥青砂浆车在频繁移动工作环境下的调平精度和快速性要求,且由于其价格低廉,因此具有很好的推广意义. [1]马捷.大型沥青砼摊铺机液压自动调平回路分析[J].公路与汽运,2007(1):131-133. [2]张亮,张认成,吴仕平.沥青砂浆车液压自动调平控制系统研究[J].机械工程与自动化,2009,156(5):122-124. [3]郭俊岑,周浚哲,唐健.基于单片机的坦克火控调试台自动调平系统研究[J].沈阳理工大学学报,2006,25(3):70-73,76. [4]秦健.一种基于PWM的电压输出DAC电路设计[J].现代电子技术,2004,27(14):81-83. [5]汤君茂,翁新华,杨汝清.带电清扫机器人液压自动调平收敛性研究[J].中国机械工程,2009,20(20):2407-2411. [6]何臻,潘宏侠,高强.一种针对液压系统的四点调平方法研究[J].弹箭与制导学报,2008,28(3):278-280. [7]吴锋,杨俊义,雷龙,等.某车载高炮液压自动调平控制系统[J].火炮发射与控制学报,2007,3(1):68-70. (责任编辑:黄晓楠英文审校:崔长彩) Design of Hydraulic Leveling System in Asphalt M ortar Vehicle Based on Embedded Microprocessor CA IZhong-shan,ZHANG Ren-cheng,YANG Jian-hong A hydraulic leveling system based on embedded microprocessor used in the asphalt mortar vehicle is developed.The measuring device of the system usesmuti-axial level senso r(angle sensor).Its controller uses Philips′smicrop rocessor LPC 2114 and itsexecutive body uses valve-control hydraulic cylinder.A two-point leveling algorithm is used in the embedded microp rocessor LPC 2114 to make the platform horizontal automatically.The results of experiments show that this leveling system is efficient and stable in leveling with leveling accuracy 0.2 degree. two-point leveling;embedded microp rocesso r;hydraulic auto-leveling;asphalt mortar vehicle TH 137;TP 272 A 1000-5013(2011)03-0266-03 2010-09-25 张认成(1961-),男,教授,主要从事智能检测与控制的研究.E-mail:phzzrc@hqu.edu.cn. 福建省科技重大专题项目(2008HZ0002-1)3 实验结果与分析

4 结束语
(College of Mechanical Engineering and Automation,Huaqiao University,Quanzhou 362021,China)
