基于ADSP-BF548的SVPWM算法实现
2011-09-20于非赵继敏
于非 赵继敏
(上海交通大学 电子信息与电气工程学院电气工程系,上海 200240)
0 引言
空间矢量脉宽调制(Space Vector Pulse Width Modulation,简称SVPWM)是对应于永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)中的三相逆变器的功率器件的一种开关触发顺序和脉宽大小的组合。SVPWM将在定子线圈中产生三相互差120电角度、波形失真较小的正弦电流。目前,SVPWM已经成为三相电压源逆变器中的一种非常流行的PWM技术,被广泛应用于永磁同步电机的控制中。与直接的正弦脉宽调制(Sinusoidal Pulse Width Modulation,简称SPWM)技术相比,有明显的优点,如功率因数高、电机转矩脉动低、直流电压利用率高、电流波形畸变小等。
Blackfin处理器ADSP-BF548是美国亚德诺半导体公司(Analog Devices Inc,简称ADI)推出的新型16/32位嵌入式处理器,可以适应当今嵌入式音频、视频和通信应用的计算要求,同时,该处理器还具有业界领先的功耗控制水平。ADSP-BF548具有高速的数据处理能力,且集成了大量的外围接口,使控制电路设计在很大程度上得到了简化。本文介绍了SVPWM算法基本原理和基于Blackfin处理器ADSP-BF548的SVPWM算法实现。
1SVPWM算法原理
与直流电动机不同,在同步电动机中,励磁磁场与电枢磁通之间的空间角度不是固定的,它随负载而变化,这将引起磁场间复杂的作用关系。因此,不能简单地像直流电机那样,通过调节电枢电流来直接控制电磁转矩。因此,若能通过电动机外部的控制系统,即通过外部条件能对电枢磁通势相对励磁磁场进行空间定向控制,就可以直接控制两者间的空间角度。在此基础上,若对电枢电流幅值也能直接控制,那就能够获得与直流电动机同样的调速性能。
SVPWM算法的基本思想就是按照产生同样的旋转磁场这一等效原则建立起来的,将一个三相交流的磁场系统和一个旋转体上的直流磁场系统,以两相系统做过渡,进行等效变换,从而在普通的三相交流电动机上实现模拟直流电动机转矩控制的规律。SVPWM算法将磁链与转矩解耦,有利于分别设计两者的调节器,以实现对交流电机的高性能调速。
PMSM的SVPWM算法控制原理如图1所示。整个控制的基本思路是:电流传感器测得的三相电流信号经Clarke变换和Park变换,得到实际的转矩电流分量iq和磁场电流分量id。iq和id再分别经过PI反馈调节,得到旋转的电压分量Ud和Uq,然后Park逆变换将它们变换成静止坐标系中的电压分量Uα和Uβ。最后,计算出三相逆变器开关信号的导通时间。
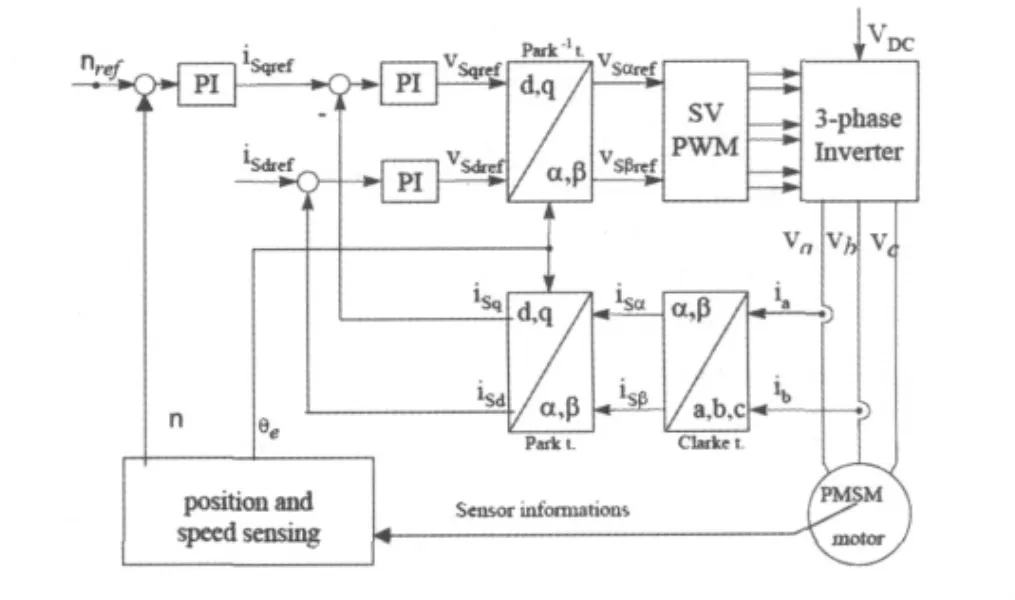
图1 永磁同步电机空间矢量控制方框图[1]
具体转子磁场定向控制策略有许多种,如id=0控制、恒磁链控制、cosφ=1控制、最大转矩电流控制、弱磁控制、最大输出功率控制等。本文采用id=0的转子磁链定向矢量控制,此策略对于要求产生转矩一定的情况下,需要的定子电流最小,可以大大降低铜耗,提高效率[2-4]。由PMSM数学模型可知,电磁转矩如式(1)

采用id=0的转子磁链定向矢量控制策略时,定子电流全部用于产生转矩(is=iq),电磁转矩就仅随着iq的变化而变化,如式(2)。在控制系统中只要控制is的大小,就能控制转速,实现矢量控制。


图2 电压空间矢量图
在交流调速系统中,逆变器将直流母线电压调制后,为交流电机提供PWM调制电压。利用6个功率开关元件的开关状态、开关时间、开关顺序组合,以保证电压空间矢量圆形运动轨迹为目标,就可以产生谐波较少的、且直流电源电压利用率较高的输出[5]。6 个开关元件,上下2个看为一组,因此,实际视为3组开关元件,可组成23=8个开关状态。这就对应于空间矢量脉宽调制方式的8个空间矢量~,除去2个零矢量,剩下可构成6个扇区,相邻2个非零向量之间的夹角为60度,如图2所示。由于逆变器的实际所能产生的矢量限制(8个),不能输出任意角度、任意模长的空间矢量,因此,为获得旋转的电压空间矢量,只能按照平行四边形法则,利用8个基本的电压空间矢量,选择不同的矢量和不同的作用时间来等效合成所需要的、任意角度和模长的矢量us。因此,算法的基本过程为:1.判断扇区;2.计算不同扇区相邻电压矢量的作用时间。
判断扇区通常的方法是:根据Uα和Uβ计算出电压矢量的幅值,再结合Uα和Uβ的正负进行判断。假定参考电压矢量落在第3扇区内,那么其等价条件为:

将上式进行化简,得到Uα且Uβ/Uα■<3。等价于

同理,可得到其他扇区内的情况,如表1所示。可以看出,扇区号是由Uβ、Uα-Uβα-Uβ所决定的。
在判断完扇区后,计算不同扇区相邻电压矢量的作用时间,以图3为例,us在第3扇区内,按照平行四边形法则,有

图3 电压空间矢量合成示意图

式中,T为PWM周期,T4为作用时间,T6为作用时间,T0为零矢量作用时间。可解得两相邻电压矢量及零矢量的作用时间分别为:
Uα、Uβ是在静止坐标系α、β轴上的分量。其他扇区内计算方法相同,见表2。

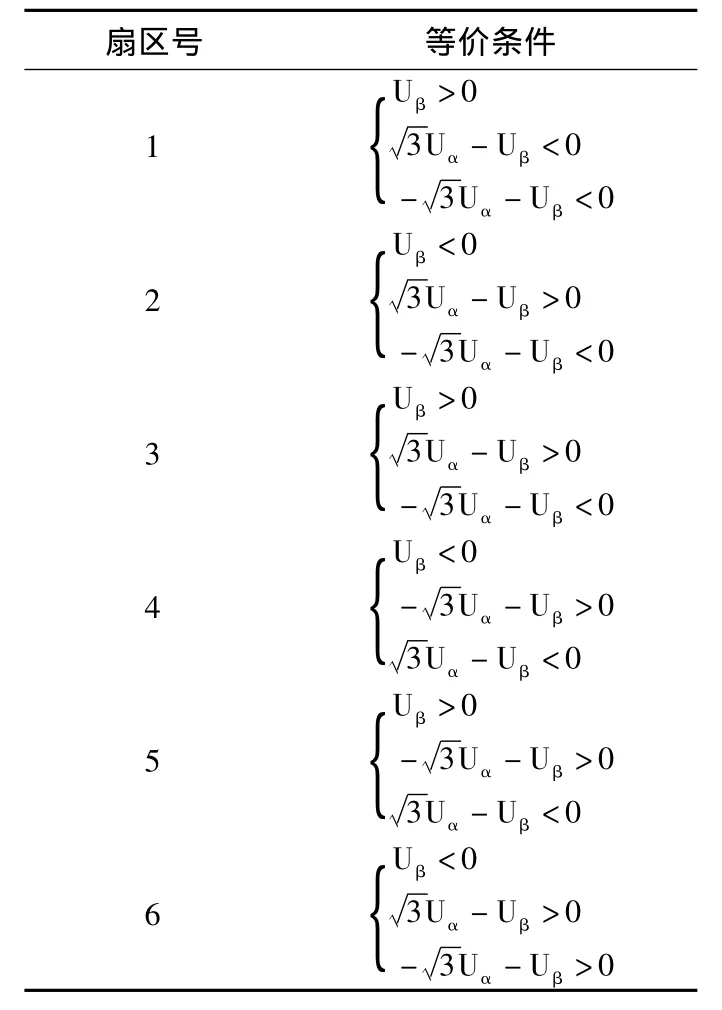
表1 各扇区内的等价条件

表2 相邻电压矢量在各扇区内作用时间
2 实验系统
实验系统采用ADI公司Blackfin系列高运算性能DSP芯片ADSP-BF548为核心,该芯片具备高速的数据处理能力和良好的控制性能。由图4可知,硬件系统主要由控制芯片、电源转换电路、PWM电路、功率驱动电路、位置检测电路、电流采样电路、AD采样电路和DA转换电路等部分组成。

图4 实验系统结构图
3 程序设计
程序部分关键内容为主程序和PWM信号中断。
3.1 主程序
主程序初始化完成后,进入循环查询状态,根据不同信息需求的精度不同,不同时间间隔进行不同的操作,如测转速、UART通讯、AD转换、保护计算等。
主程序初始化时将给定启动时转子的位置[6],因为矢量控制需要检测或估计电机转子磁通的位置及幅值来控制定子电流或电压,而采用增量式光电脉冲编码器作为正弦波永磁同步电机的转子位置检测元件,必须要在系统刚上电时,就测得电机转子的精确的初始位置。因此,在开机前要确保转子移动到电角度为0的点。

图5 主程序流程
3.2PWM信号中断
在本设计中,PWM信号的发生采用了单更新模式,即对应一个sync信号产生一个PWM周期,sync信号与PWM信号频率相同。本设计中,定义PWM信号频率为14kHz,即一个PWM周期为70 μs左右。若采用的PWM频率过低,会导致电机PWM信号更新速度过慢,电机调速效果将受到影响;而若频率太高,会导致中断的间隙时间变短,在间隙时间内要进行的电流环计算、按键响应、LCD显示等操作,将无法完成。本设计定义的14 kHz是基于实验测试得到的一个比较理想的结果。通过此中断,可以得到三相IGBT导通时间并调整三相PWM信号,流程图见图6(a)。其中,逆变电路各IGBT导通时间的计算过程如图6(b)。
值得一提的是,基于Blackfin处理器ADSP-BF548强大的处理能力,与以往常用的DSP芯片处理SVPWM算法时不同,ADSP-BF548将不再需要编写正弦表进行查询,而可以直接实时计算正弦数值,这就大大提高了精确度。

4 实验结果
图7显示的是扇区号N的曲线,矢量按扇区1→5→4→6→2→3→1变化。图8为相邻矢量开断时间T1、T2波形。图9下方曲线为id,上方为为iq,可以看到,id始终在0附近波动,iq也稳定在一个与转速有关的固定值附近震荡,符合设计。
5 结束语
本文在介绍SVPWM算法的基础上,选定id=0控制策略进行配置,介绍了如何在ADI公司Blackfin处理器ADSP-BF548平台来实现SVPWM算法。和以往的一些DSP相比,ADSPBF548计算能力更强,配置更方便,控制精度更高。
[1] Erwan Simon.Implementation of a Speed Field Oriented Control of 3-Phase PMSM Motor Using TMS320F240[M].Application Report SPRA 588,Texas Instruments,1999.
[2]李志民,张遇杰.同步电动机调速系统[M].北京:机械工业出版社,1996:44-45.
[3]孙丹.高性能永磁同步电机直接转矩控制[D].浙江:浙江大学电气工程学院,2004:137.
[4]郑安平,王磊,吉炜寰,宋镜波.矢量变换控制永磁同步电动机的全数字系统[J].微特电机,2006(12):31-33.
[5]章飞荣,章玮.基于MC56F8357的永磁同步电机伺服控制系统[J].电气自动化,2007(29):3-5,31.
[6]许家群,张学典,唐任远,等.永磁同步电动机矢量控制中的磁场定位问题研究[J].电气自动化,2002(3):15-17.