基于Li DAR数据的建筑物自动提取方法的比较
2011-09-19冯甜甜龚健雅
冯甜甜,龚健雅
(1.同济大学测量系,上海 200092;2.武汉大学测绘遥感信息工程国家重点实验室,湖北武汉 430079)
基于Li DAR数据的建筑物自动提取方法的比较
冯甜甜1,龚健雅2
(1.同济大学测量系,上海 200092;2.武汉大学测绘遥感信息工程国家重点实验室,湖北武汉 430079)
简述三种典型的利用LiDAR点云自动提取建筑物的方法。提出对建筑物提取结果的精度评价指标,并对三种方法的提取结果进行比较。结果表明基于Dempster-Shafer理论的建筑物自动提取方法最为稳健。
LiDAR;建筑物自动提取;精度评定
建筑物信息在很多应用中都起到十分重要的作用,如城市和区域规划、交通规划、人口估计和预测、污染分析及能量预算等[1]。随着城市发展进程的加快,发展建筑物自动提取方法对于城市规划者显得相当重要。然而,由于建筑物屋顶的复杂形状及顶部多样的组成材料,如何从影像上自动准确地提取建筑物目标仍是一个较难的研究热点[2]。近几年,激光雷达 (light detection and ranging,Li DAR)技术的出现使得快速获取高精度的三维地表数据成为可能,这也给建筑物提取研究带来了新的机遇和挑战。其中,具有代表性的利用 Li DAR数据探测建筑物的方法是平面拟合[3]和区域增长法则[4]。然而,大部分单独使用LiDAR数据进行建筑物提取的方法在分辨部分地物方面都存在共同的问题,尤其是对于建筑物、植被以及桥梁的辨别。为了弥补这一局限,有些学者提出将高分辨率影像与 Li DAR数据相结合来提取建筑物。例如,文献 [5]首先从LiDAR数据中提取非地面特征,再利用从 IKONOS影像中提取出来的 NDV I信息去除植被。文献[6]先借助LiDAR数据分割出建筑物点,再结合影像的线段提取和 LiDAR估算的概略主方向将建筑物轮廓筛选出来。总之,到目前为止已经出现了大量的建筑物自动提取算法,但不同提取算法都有自身的特点,而对于不同提取算法之间的比较以及对建筑物提取结果的精度评价指标方面的研究相对较少。
本文介绍了三种典型的利用 LiDAR数据及高分辨率遥感影像的建筑物自动提取方法,这三种方法分别是基于平面拟合的区域增长法则、面向对象的分类方法以及基于 Dempster-Shafer(D-S)理论多源数据融合的建筑物自动提取方法。最后从建筑物的数量、面积和体积三个方面提出五个评价指标,对三种方法的提取结果进行定量的精度评定和比较。
一、建筑物提取方法
在进行建筑物提取之前需要对数据进行预处理。首先用 Delaunay三角网生成算法,定义每个LiDAR点的空间邻接关系,并用最邻近法将 LiDAR点内插成 1m分辨率的格网。然后计算表面高度变化的多尺度梯度,并在多分辨率、综合分析的框架下采用自适应侵蚀规则 Li DAR格网点的方法区分地面点及非地面点,生成地面掩膜图像[7]。另一方面,对应研究区域上的植被掩膜图像根据从 Quick-Bird遥感影像计算出的 NDV I值及给定的阈值获得,该处理通过 ENV I软件实现。
1.区域增长法提取建筑物方法
区域增长法是典型的利用 Li DAR数据提取建筑物的方法。屋顶的探测从种子点开始,分析邻近点与种子点的共面关系,逐步将邻近的共面点加入进来。该方法首先通过测试非地面点的八邻域点来识别内部点和边界点;对于每个非地面内部点,用 3×3范围内点的高程值模拟一个平面,并计算该平面与这 9个点之间的最大绝对偏差 (MAD);所有内部点按照MAD值升次排列,并将具有最小MAD值的点作为第一个种子点;将绝对偏差小于阈值的点加到当前平面中,并重复该处理,当找不到种子点时,区域增长处理结束。最后对区域增长处理的结果进行一些后处理:首先,根据植被掩膜图像去除区域增长处理结果中的植被;其次,用剩下的 Li-DAR点生成只表示建筑物或非建筑物的二值图像,并将二值图像中的小洞填补起来;最后,再利用最小建筑物尺寸、最小建筑物高度以及最小建筑物体积等阈值将非建筑物区域过滤掉。
2.面向对象的分类方法提取建筑物
在面向对象的分类中,对影像的分割是比较关键的一步。这里将多个影像层输入易康软件进行影像的分割,这些影像层包括QuickBird四个多光谱影像、归一化植被指数 (NDV I)影像、LiDAR影像和地面掩膜图像。为了更好地进行影像分割生成同质区域,给每个影像层设定一个权值,权值的大小与该影像层的重要性成正比。整个影像分类过程分为以下三个阶段进行:第一阶段的目的是为了区分植被和不透水层。在权值的设置中,将 NDV I影像层的权值设为 5,其他影像层的权值设为 1。分割后,选取部分特征并使用特征空间优化工具来判断哪些波段能有效地区分植被和不透水层,并将这些波段数据用于第二阶段的分割。第二阶段的目的是为了区分建筑物、植被和地面。将 NDV I影像层的权值降低至 2,LiDAR影像层的权值设为 3,地面掩膜图像的权值设为 4,其他所有层的权值设为 1,得到分割结果。第三阶段对影像分割结果进行分类,根据分割结果中对象的光谱反射值、形状、纹理等特征采用最邻近分类器进行分类,将影像分割的结果分成建筑物、植被、地面三个类型。
3.用D-S理论融合多源数据提取建筑物
D-S理论的主要思想是根据一个论断不同证据来源的概率来推断其信任度[8]。这里将地面掩膜图像、植被掩膜图像和候选建筑物图像作为三种数据源。候选建筑物图像通过地面掩膜图像和植被掩膜图像共同获得。假设图像中只有地面、建筑物、植被这三种类别,将所有非地面点且非植被点作为建筑物点并构成二值图像,再去除二值图像中小于最小建筑物尺寸的区域后作为候选建筑物区域。根据 D-S理论,将每一个候选建筑物区域看作一个独立的论断,并通过计算信任函数来判断该区域是否为建筑物区域。首先,寻找每个候选建筑物区域的最小外接矩形,并计算最小外接矩形中的像素个数,假设为 N;在地面掩膜图像的对应区域中计算地面点的像素个数,设为 p;那么该区域是地面的概率为 p/N。由于对该区域内其他像素点的类别没有任何证据,那么该区域属于植被、建筑物、植被或建筑物的概率相同。而所有类别的概率之和为 1,因此属于上述三类的概率都是 (1-p/N)/3。类似的,根据植被掩膜图像得到的各个类别的概率也可以用同样的方法计算出来。而对于建筑物候选图像,每个候选区域都有较大的初始建筑物概率,因此给定一个较低的常数作为初始建筑物概率,这样则需要更多的来自其他数据源的证据来支持该区域是建筑物这一论断,这也使得建筑物区域的判断更具说服力。据研究表明,适当地降低初始概率值并不会对建筑物区域判断的正确性产生影响[9]。最后,通过寻找各个类别信任函数的最大值来确定该候选区域的类别。
二、试验及讨论
本文在美国得克萨斯州奥斯汀市区内选取四个具有不同特征的区域作为试验区,分别应用上述三种方法进行建筑物的自动提取试验。将提取结果与实地调查所得到的参考数据比较,从基于建筑物的数量、面积和体积三个方面提出五种精度评价指标进行定量的精度评定和比较。
1.基于建筑物的数量
基于建筑物数量的精度评定采用检出率和正确率这两个评价指标。检出率是指正确提取出的建筑物数目占参考数据中建筑物总数的比例,表达提取的完整性,反映试验区内的漏检错误;正确率是指正确提取出的建筑物数目占提取结果中建筑物总数的比例,表达提取结果的正确率,反映试验区内的提取错误。这里认为只要建筑物的某一部分被正确提取出来了,就将这个建筑物记为被正确提取的建筑物。表 1显示了三种建筑物提取结果的检出率和正确率,从提取结果的检出率上看,四个试验区上的最高检出率均是由基于D-S证据理论的数据融合方法获得的;从提取结果的正确率上看,三种方法都不能使得在具有不同特点试验区的提取结果均具有较高的准确率。

表 1 基于建筑物数量的精度评定结果 (%)
2.基于建筑物的面积
基于建筑物面积的精度评定采用面积漏检错误和面积提取错误这两个评价指标。面积漏检错误是指试验区中没有被提取出的建筑物面积占参考数据中建筑物总面积的比例,反映有多少面积实际上是建筑物区域却没能被提取出来;面积提取错误是指提取结果中被错误提取为建筑物的面积占提取结果中建筑物总面积的比例,反映有多少面积实际上不是建筑物却被误认为是建筑物被提取出来了。
三种提取结果的精度评定结果如表 2所示。通过漏检错误对比发现,三种提取方法在四个试验区上得到的漏检错误差别不大。相比其他两种提取方法,用区域增长法的提取结果中有较高的漏检错误。根据提取错误的对比,用影像分类方法的提取结果明显差于其他两种提取方法,在用 D-S理论融合方法的提取结果中,除了试验区三中的提取错误较大程度地低于用区域增长法则的提取结果,其他三个试验区中的差别不大。

表 2 基于建筑物面积的精度评定 (%)
3.基于建筑物的体积
最后提出全局体积误差这一指标对提取的建筑物体积进行定量的精度评定。全局体积误差是指提取的建筑物体积与真实建筑物体积之间的绝对误差占真实建筑物体积的比例的平均值,反应建筑物体积上的整体提取偏差,计算结果如表 3所示。
对比每个试验区中的体积误差发现,影像分类方法的提取结果除了在试验区二中的提取误差较小外,在其他三个试验区中的提取误差都明显高于其他两种方法。而根据基于建筑物面积的精度评定结果可知,影像分类法在试验区二中存在大量的提取错误,因此虽然该方法在试验区二中表现出了较小的建筑物体积误差,但实际上这个结果是不可取的,所以影像分类方法的提取结果是三种提取结果中最不理想的。在试验区一、三中,用区域增长法和基于D-S理论的数据融合方法所提取出的建筑物在体积上的精度非常相近,而区域增长法在另外两个试验区中的提取误差明显高于D-S数据融合方法。因此有理由认为在这三种建筑物自动提取方法中,用 D-S理论的数据融合方法所提取出的结果在建筑物体积方面具有最小的误差。
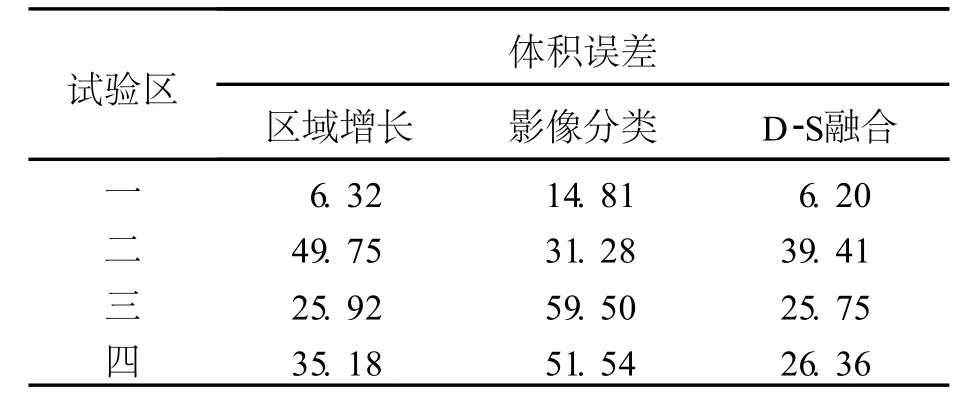
表 3 基于建筑物体积的精度评定 (%)
三、结束语
本文比较了用区域增长法、面向对象的分类方法及D-S理论三种方法自动提取建筑物的能力,并提出五个精度评定指标对提取结果进行了定量的精度评价。综合各项精度评价指标发现,用 D-S理论进行建筑物的自动提取是最为稳健的方法,其提取结果在五个精度评价指标上均能达到较高的精度,这也给结合多源数据自动提取建筑物提供了新的思路。
[1]GRUEN A,NEVAT IA R.Automatic Building Extraction from Aerial Images[J]. Computer Vision and Image Understanding,1998,72(2):99-100.
[2]MAYUNGA S D,ZHANG Y,COLEMAN D J.Semiautomatic Buiding Extraction Utilizing QuickBird Imagery[C]∥Proc.of the ISPRS Workshop CMRT.Vienna:ISPRS,2005:131-136.
[3]NARD INOCCH IC,SCA ION IM,FORLAN I G.Building Extraction from LiDAR Data[C]∥IEEE/ISPRS Joint Workshop on Remote Sensing andData Fusion overUrban Areas. Rome: Institute of Electrical and Electronics Engineers in Piscataway,2001:79-83.
[4]AUER S,H INZ S.Automatic Extraction of Salient Geometric Entities from L IDAR Point Clouds[C]∥Geoscience and Remote Sensing Symposium.Barcelona:Institute of Electrical and Electronics Engineers(IEEE),2007:2507-2510.
[5]SOHN G,DOWMAN I.Data Fusion of High-resolution Satellite Imagery and Li DAR Data forAutomatic Building Extraction[J]. ISPRS Journal of Photogrammetry and Remote Sensing,2007,62(1):43-63.
[6]程亮,龚健雅.LiDAR辅助下利用超高分辨率影像提取建筑物轮廓方法[J].测绘学报,2008,37(3):391-393.
[7]S ILVAN-CARDENAS J L,WANG L.A Multi-resolution Approach for FilteringLiDAR AltimetryData[J].ISPRS Journal of Photogrammetry&Remote Sensing,2006,61(1):11-22.
[8]SHAFER G.A Mathematical Theory of Evidence[M].Princeton:Princeton University Press,1992.
[9]LU Y H,TR INDER J C,KUBLK K.Automatic Building Detection Using the Dempster-shafer Algorithm[J].Photogrammetric Engineering and Remote Sensing,2006,72(4):395-403.
Comparison of Automatic Building Extraction Methods Based on Li DAR Data
FENG Tiantian,GONG Jianya
2010-03-03
冯甜甜 (1983—),女,江苏宿迁人,博士,主要从事建筑物提取及人口估算研究。
0494-0911(2011)02-0021-03
P237.9
B