五轴联动后处理中非线性误差控制的研究*
2011-09-12吴汉夫唐清春
吴汉夫,唐清春
(广西工学院职业技术教育学院,广西柳州 545006)
五轴联动后处理中非线性误差控制的研究*
吴汉夫,唐清春
(广西工学院职业技术教育学院,广西柳州 545006)
文中分析了非线性误差的产生原因及有效估算方法。通过机床的运动学分析,建立了BV100五轴联动机床的运动变换数学模型;结合线性插补原理,提出了该类机床的非线性运动误差的估算及补偿模型;通过VB语言,开发了具有非线性误差补偿功能的专用后置处理器,并通过某叶轮的切削加工实验验证了该后置处理器的正确性和实用性。
五轴联动;后处理;非线性误差;研究
0 引言
在理想情况下,五轴联动加工中刀具的刀心相对于被加工的曲面表面的运动轨迹是一条非线性的空间曲线。而实际情况是:通过通用CAM软件前置处理时,一般都采用弧弦逼近方式,将自由曲面网格划分后,离散成一系列微小直线段,导致了非线性误差的产生。如何有效控制非线性误差是提高曲面五轴联动加工精度的一个重要问题。本文针对于五轴联动加工,在后置处理中根据刀位源文件对非线性误差进行了有效计算,并在超差时进行了相应处理,最后通过切削实验进行了验证。
1 五轴联动加工运动分析
通常数控加工中,先经过通用CAM软件前置处理生成刀位源文件,再根据机床的具体结构通过后置处理变换为机床坐标系下各坐标轴的运动坐标指令。由于五轴联动加工中刀心轨迹以及刀轴矢量都是变化的,尤其是旋转角度所导致的非线性运动与数控系统采用的线性插补方式不一致,导致五轴联动加工过程中存在非线性运动误差[1]。
图1为五轴联动加工中相邻刀位点之间刀具的运动轨迹图,直观地反映了非线性运动误差的产生机理。其中:刀位源文件由刀位点位置PW(t)和刀具矢量UW(t)组成;PW(t)所描述的曲线为理想的编程曲线;在五轴联动时非线性运动转换为各轴的线性插补运动,其合成运动轨迹直线PWL(t)偏离曲线PW(t),这就是五轴联动加工中非线性误差的产生机理[2]。
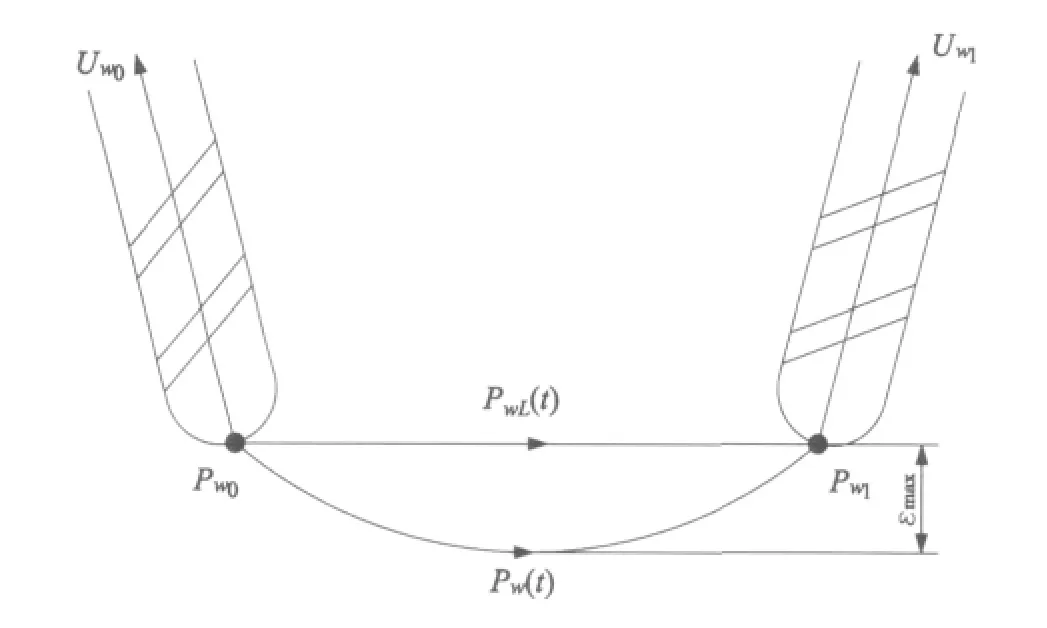
图1 非线性运动误差示意图
分析五轴联动非线性运动误差前,首先要对五轴联动机床进行运动求解,建立其数学模型。五轴联动机床结构形式有很多种,不同结构形式的五坐标机床对非线性误差的影响是不同的。本文针对北京机电院生产的BV100五轴联动机床进行运动分析,该机床属于典型的工作台回转摆动型,主轴上刀轴矢量方位不变,工作台既回转又摆动;其中C角做360°回转,A角做±110°摆动。机床虚拟结构示意图如图2所示。为描述机床的运动链和运动变换关系,所建立的工件坐标系如图3所示。
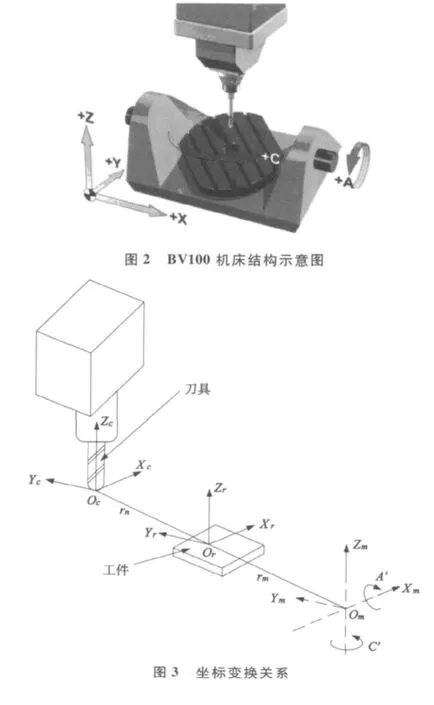
设工件坐标系为OmXYZ,工件可以绕X轴摆动A(0°~100°)角,工件可以绕 Z 轴转动 C(0°~360°)角,工作台回转轴与Z轴一致;机床运动坐标系为OrXYZ,OmXYZ-OrXYZ=d;刀心C0在工件坐标系的位置为(Xc,Yc,Zc);刀轴矢量a在工件坐标系中为(ax,ay,az)。计算时首先将刀轴矢量的起点移动到工件坐标系的原点,然后将刀轴矢量绕Z轴顺时针方向转动到(-Y)(+Z)平面上,再将刀轴矢量绕X轴顺时针转动到与Z坐标方向一致。这样转动可以保证当az≥0时,刀轴矢量绕X轴顺时针转动角度在(-100°~0°)之间,即刀具相对于工件绕X轴的转动角A在(100°~0°)之间。C、A角计算采用公式为[3]:
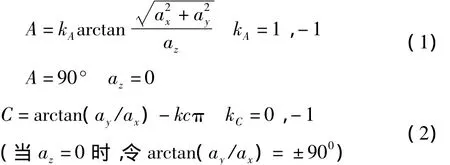
算出A、C角之后就可以计算刀心C0经过工件转动后在机床坐标系OrXYZ中的位置。
将工件坐标系经平移及旋转到机床坐标系中可得[4]:

式中T1T2T3分别为工件平移变化矩阵,绕X轴旋转变换矩阵,绕Z轴旋转变换矩阵。
将其展开可得:
2 非线性误差分析及补偿
在BV100数控机床加工过程中,刀具沿3个平动轴进行平移运动,工作台围绕X、Z轴进行旋转运动。根据相对运动原理,对该机床数控加工过程进行描述。图4中刀具实际运动轨迹为经过Ci和Cf的曲线。在理想情况下,刀具运动轨迹应该为点Ci和Cf之间的实线。刀具上旋转中心的运动轨迹应该为经过Oi、0m'、Of的曲线。由于数控系统只能进行线性插补,实际运动轨迹为经过Oi、0m、Of的直线。导致刀具的实际运动轨迹偏离了理想运动轨迹,其中Cm为Ci和Cf之间的中点。
由图4可见,非线性误差应该为PW及其所对应的P'W间的距离。点Cm和PW之间的距离就可以作为点PW和P'W之间距离的近似值。为了合理的计算非线性运动误差,以二维图的方式来计算,参考图1。

图4 零件表面非线性误差分析
假设相邻前后两刀具点分别为PW1、PW0,构成直线PW1PW0。通过机床运动模型变换,得出两刀具点的坐标量 PW0(X0,Y0,Z0,A0,C0)、PW1(X1,Y1,Z1,A1,C1)。由于机床运动是直线插补,刀具从PW0运动到PW1的过程中,任意一时刻机床运动状态为:
Pt为在时间段t内,各个时刻处工件坐标系下的刀具点。设Pt到直线P0P1的距离为εt,根据非线性加工误差的分布情况,Pt直接取P0P1中点,即t=0.5。综上所述:

插入的新刀具点Pm再次进入机床运动参数处理步骤,计算 Pm机床各运动轴运动量(Xm,Ym,Zm,Am,Cm)。如果新插入的刀具点Pm与前刀具点P0或者后刀具点P1仍然超过设定误差值则再次在按照上述方法在P0Pm或PmP1间插入新的刀具点,直到插入的新的刀具点与前后两刀具点误差值小于设定误差值为止。
3 专用后置处理器的实现及验证[5]
BV100五轴数控机床属双转台五轴加工中心,配置了西门子840D系统。本后置处理器基于VB高级语言,针对UG软件前置处理的刀位源文件,首先根据公式(7)对刀位源代码进行误差判断,然后根据公式(8)进行中间点的插入;根据修正后的源代码文件采用公式(4)进行坐标转换,修正对应的程序内容[6]。
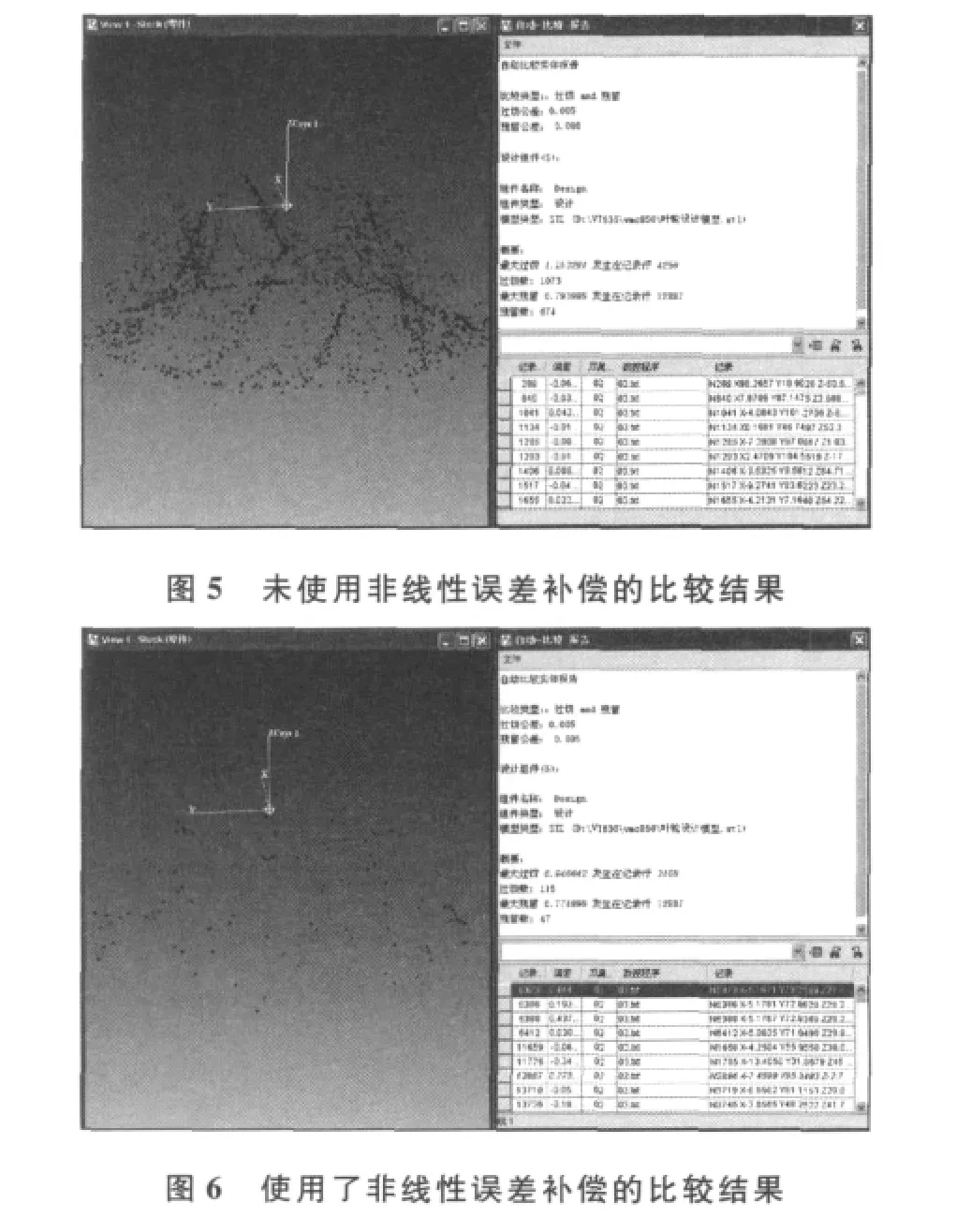
3.1 VERICUT 7.0加工模拟仿真结果
通过该后置处理器处理出的加工程序,在VERICUT 7.0里面进行G代码仿真见图5及图6。图中红色代表过切,蓝色代表残余量。图5是未进行非线性误差补偿时0.01过切和残留量时的比较结果,而图6是在后置处理软件中使用了许用值进行误差补偿后0.01过切和残留量时的比较结果。由对比结果可知,图6中产生误差的G代码行数明显比图5少,而且过切量和残余量也比图5小。由此可以证明,本后置处理器的非线性误差补偿功能确实能有效减少五轴加工中的非线性误差值,对于精度要求高的零件的加工具有重要的应用价值。
3.2 机床切削加工实验
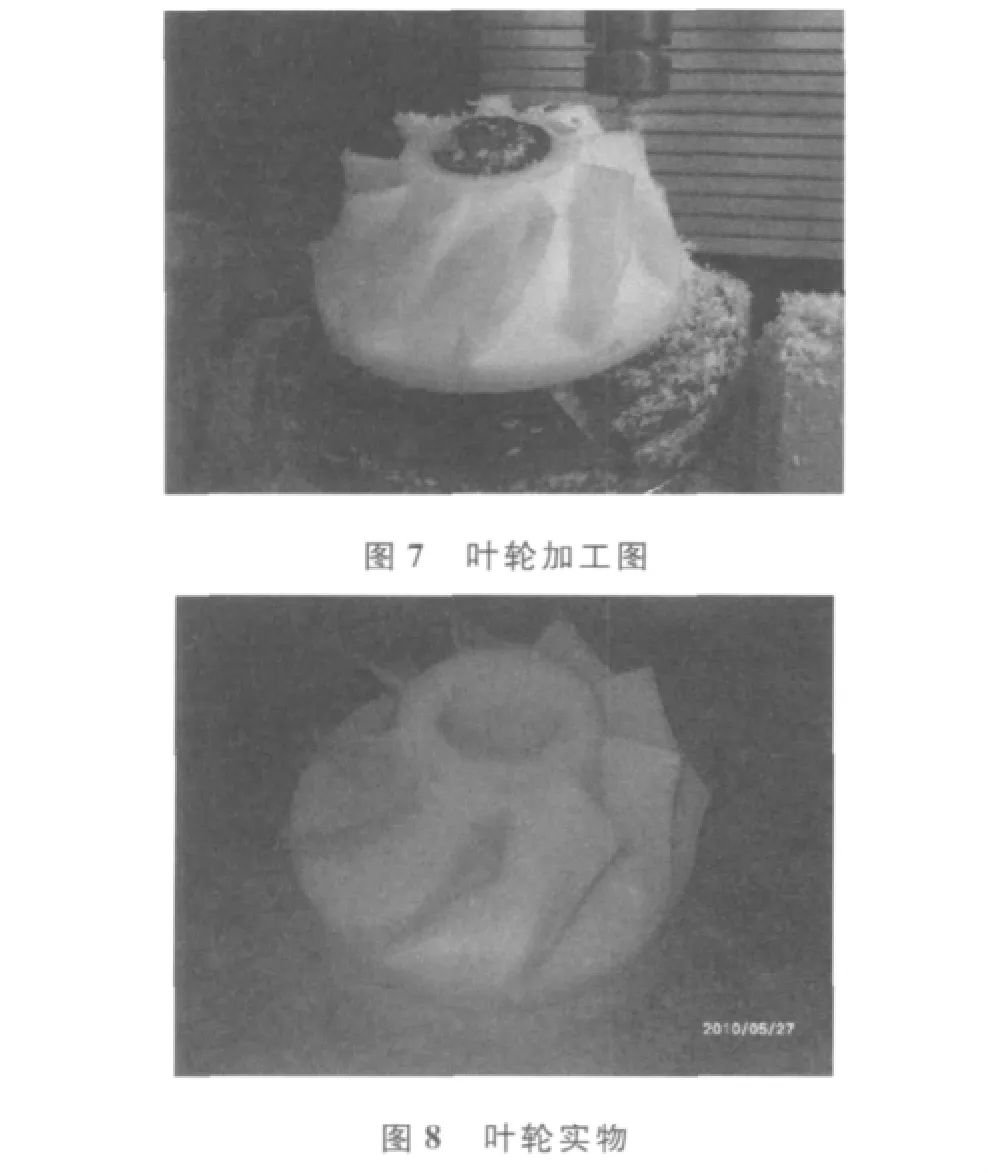
根据该后置处理程序,使用VERICUT仿真功能对加工轨迹以及生成的NC代码进行了仿真验证后,在BV100立式五轴联动高速铣削加工中心上实现了整体叶轮的实体高速铣削加工,加工过程及加工后得到的零件实物分别见图7及图8。加工过程平稳,加工中整体叶轮无过切现象,叶片翻边部分光滑过渡,从而验证了该后置处理器的正确性。
4 结束语
本文以BV100机床为例,针对双转台结构五坐标机床提出了五轴联动运动变换数学模型和非线性运动误差估算模型,为该类结构机床的非线性误差控制及补偿提供了依据。根据所推导的数学模型开发了该机床的专用后置处理器,配置了非线性误差补偿功能。通过对叶轮零件的实际加工,验证了其可行性。
[1]吴大中,王宇晗,冯景春,等.五坐标数控加工的非线性运动误差分析与控制[J].上海交通大学学报,2007,41(10):1608-1612.
[2]王丹,陈志同,陈五一.五轴加工中非线性误差的检测和处理方法[J].北京航空航天大学学报,2008,34(9):1003-1006.
[3]唐清春,吴汉夫.叶片五坐标联动加工后置处理开发及应用[J]. 汽轮机技术,2009,51(6):475-477.
[4]何永红,齐乐华,赵宝林.双转台五轴数控机床后置处理算法研究[J].数控技术,2006(1):9-11.
[5]唐清春,吴汉夫.基于CimatronE的四轴后置处理软件开发[J].组合机床与自动化加工技术,2010(6):15-17.
[6]龚沛曾,杨志强,陆慰民.Visual Basic程序设计教程[M].北京:高等教育出版社,2007.
Study on Controlling of Non-linear Errors of Five-axis Linkage Postprocessing
WU Han-fu,TANG Qing-chun
(School of Vocational and Technical Education,Guangxi University of Technology,Liuzhou Guangxi 545006,China)
The causes and effective estimation method of non-linear errors were analyzed in this paper.The motion transformation modeling of BV100 five-axis linkage machine tool was established by kinematic analysis.The non-linear error estimation and compensation model ofthe machine tool was suggested through linear interpolation principle.The dedicated post-processor of non-linear error compensation function was developed by VB language.The impeller cutting experiment showed that the result of the post-processor was correct.
five-axis linkage;postprocessing;non-linear error;study
TK263
A
1001-2265(2011)08-0005-04
2011-05-04
广西千亿元产业重大科技攻关工程项目(1114002-28)
吴汉夫(1967—),男,湖北宜昌人,广西工学院职业技术教育学院讲师,硕士研究生,主要研究方向为数控加工、数控机床热变形补偿等,(Email)wuhf67@126.com。
(编辑 赵蓉)