尾流自导鱼雷最小开机距离及其应用
2011-09-02野学范李本昌张孝芳孙晓磊
野学范,李本昌,张孝芳,孙晓磊
(海军潜艇学院,山东 青岛 266042)
自导鱼雷在攻击过程中准确地选择末段自导开机距离(时机)是影响攻击效果的重要环节。这是因为如果鱼雷自导开机过早,有可能产生不利于平台对目标继续探测和鱼雷导引的状况[1-2],或者由于鱼雷的变深行为导致过早被暴露的可能,由此,不仅会给目标提供较为充裕的对抗时间,还可能遭到目标对发射台的反击;如果开机过晚,则又可能影响鱼雷对目标的正常搜索,甚至失去鱼雷搜索发现目标的机会。所以,恰当地确定鱼雷自导开机距离是作战使用中一个不容忽视的问题。
末段声自导鱼雷攻击如此,末段尾流自导鱼雷攻击也是如此。由于鱼雷自身技术的要求,以及作战使用过程中诸多不确定因素的影响,要想恰到好处地选择鱼雷自导开机时机,首先必须依据鱼雷的技术要求、作战使用的可能情况确定鱼雷所需要的最小开机距离。以此为目的,本文试图研究末段尾流自导鱼雷的最小开机距离及其应用问题。
1 尾流自导最小开机距离概念
由于鱼雷技术和作战使用的需要,尾流自导鱼雷开机后通常需要完成下列动作:变深,以从导引时的深度或预设定的深度上浮到满足鱼雷自导检测的深度上;变速,以使用规定的速度检测和跟踪目标;自导自适应,以建立尾流自导的检测基准等,而完成这些任务都需要一定的时间过程。所以,从本质上来说,确定鱼雷自导开机距离的主要依据是鱼雷自导开机点与预定的射击瞄准点[3-4](目标尾流中的一点)之间的距离。如果鱼雷正常完成这一系列工作之后正好进入目标尾流,那么鱼雷自导开机点与鱼雷进入目标尾流点之间的距离就称为尾流自导的最小开机距离。
显而易见,在作战应用中,无论采用尾流自导射击,还是采用线导加尾流自导射击,最小开机距离都是确定鱼雷自导开机最晚时机的重要依据。也就是说,只有在鱼雷与射击瞄准点之间的距离大于最小开机距离时控制鱼雷自导开机才是有效的,否则攻击失败是不可避免的。因此,研究这一最小距离是研究尾流自导鱼雷自导开机时机的前提条件和重要依据。
2 影响尾流自导最小开机距离的主要因素
由于在攻击应用中,很多不确定性因素的存在,必将使得鱼雷最小开机距离与这些因素密切相关。例如,不同的发射(导引)深度,会使鱼雷上浮过程需要的时间不同,从而影响完成自导开机过程的时间。因此,鱼雷自导的最小开机距离实际上是关于各种相关因素的函数,而并不是通过简单的定性分析就能确定的参数。其中,主要的影响因素在于以下几个方面。
2.1 鱼雷航行深度的影响
鱼雷航行深度与最小开机距离之间存在着一定的关系。原因在于:鱼雷在自适应前有一个爬升变深的过程。因此,从不同深度爬升到自导开机后的战斗深度所需要的时间是不同的。同时,鱼雷在以一定的俯仰角爬升的过程中,在水平方向上必然存在着速度的分量。因此,发射深度越大,由速度水平分量产生的水平移动距离亦随之增大。
2.2 鱼雷航向误差的影响
鱼雷航向误差是指在水平面上向左或向右偏离平均航迹的角度[5]。鱼雷航程与航向误差余弦的乘积和最小开机距离之间存在正比例关系,这种误差将影响鱼雷进入目标尾流的距离。
2.3 鱼雷速制及其误差的影响
1)鱼雷速制。鱼雷速制的不同造成的影响主要表现在两方面:一是鱼雷上浮过程所需时间不同;二而是鱼雷自导自适应过程所消耗航程不同。
2)鱼雷速度误差。在确保鱼雷完成自导开机过程的前提下,鱼雷航速误差是确定自导开机最小距离应顾及的重要因素,通常应以正向误差为基准。
2.4 目标散布的影响
目标散布是由潜艇测量目标运动要素误差引起的,目标散布区的大小与海上目标的定位误差、战术态势、射击区的地理位置及水文气象条件、目标信息的延时时间等因素有关。
在潜艇攻击中,目标方位(航向)、距离误差对鱼雷直航段航程影响较大,自然也就对最小开机距离产生较大影响;而目标航速误差影响只表现在鱼雷尾流进入点相对目标舰尾的偏移量,且该偏移量不会使进入点超出目标尾流有效范围,因此鱼雷尾流进入点的偏移问题可以忽略,航速误差产生的影响可以不计。[6]
3 尾流自导最小开机距离数学模型
3.1 计算模型
依据上述各种因素及其表现形态,可建立尾流自导最小开机距离的数学模型如下:



图1 尾流自导鱼雷射击示意图
如图1所示,Dmin为尾流自导最小开机距离,d1为鱼雷完成变深时航行航程,d2为鱼雷完成自适应航行主航程,d3为鱼雷完成变高速时航行航程,dΔ4为开机点散布误差,dΔ5为目标运动要素误差引起的鱼雷直航段航程误差,vΔ1为开机前速度误差,v1为低速,a为鱼雷从低速转至高速的加速度,v2为高速,hΔ为鱼雷深度误差,H为鱼雷巡航深度,h为预设定的战斗深度,t0为鱼雷开机前的航行时间,t1为鱼雷完成变深所需时间,t2为鱼雷自适应时间,t3为鱼雷完成变高速所需时间(t2、t3设为20′),α为鱼雷变深时俯仰角(设为 30°),β为鱼雷自适应蛇行机动时与主航向夹角(设为 45°),x为鱼雷方位失准角。ΔSlΔDg、ΔSlΔXm分别为目标距离误差、航向误差引起的鱼雷直航段航程误差,由于数学描述很长,且文献[6]中已有详细描述,在此不再展开。
3.2 仿真计算和分析
采用目标速度20Kn,鱼雷速度30 Kn,设定鱼雷航向误差为5度,利用上述数学模型分别仿真计算鱼雷设定深度5m、25m时自导最小开机距离。
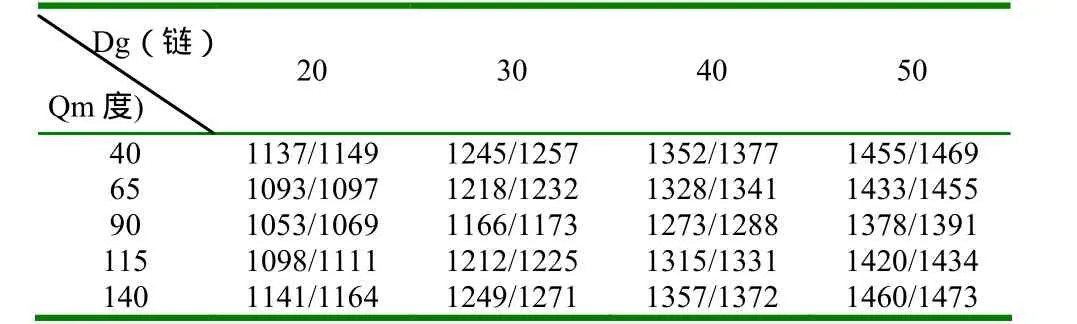
表1 鱼雷航向误差5度设定深度5m/25m时自导最小开机距离(m)
结果表明,正横附近,鱼雷航向正向误差影响自导开机距离较小,因此自导最小开机距离较小;随着攻击目标舷角的增大或减小,鱼雷航向误差引起的正向误差均呈增大趋势,目标距离越远鱼雷航向引起的正向误差也越大,此时自导最小开机距离自然越大;鱼雷设定深度虽也对其产生影响,但影响较小。
采用目标速度20 Kn,鱼雷速度30 Kn,鱼雷航程误差3%,分别仿真计算鱼雷设定深度5m、25m时自导最小开机距离,结果如下:
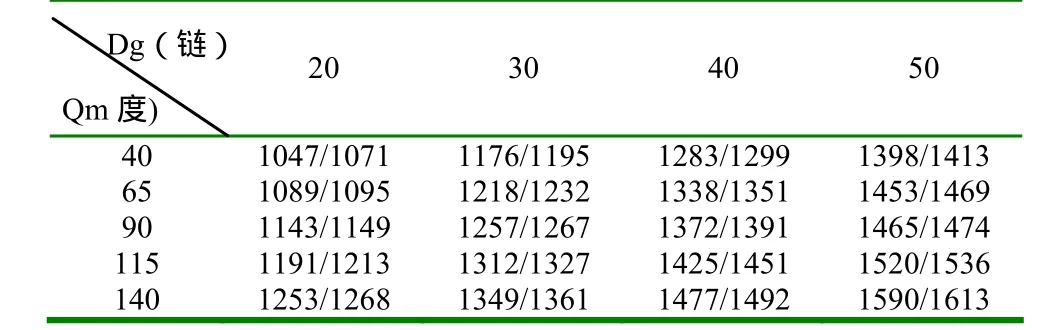
表2 鱼雷航程误差3%设定深度5m/25m鱼雷自导最小开机距离(m)
结果表明,距离越远,目标舷角越大,鱼雷航程正向误差影响自导开机距离越大,因此自导最小开机距离越大;设定深度影响同上。
采用目标速度20m/30m,目标距离误差10%、航向误差5度,鱼雷速度30 Kn、设定深度25m、航向误差2度、航程误差3%,仿真计算结果如表3。

表3 目标速度20 Kn /30 Kn综合要素误差影响下的最小开机距离(米)
结果表明,综合要素误差对鱼雷自导最小开机距离的影响是:目标距离越远、攻击目标舷角越大,鱼雷自导开机距离受综合要素误差正向影响越大,因此鱼雷自导最小开机距离越大。
综合比较三个表中的数据不难看出:目标距离误差、航向误差的影响是主要的,鱼雷航向误差、航程误差以及设定深度的影响是次要的。
采用目标速度10-35 Kn,进行重复仿真计算和统计分析,综合要素误差对自导最小开机距离的影响与表3呈相同的变化规律;且目标速度越大综合要素误差对自导最小开机距离影响越大。在鱼雷自导开机任务充分完成的基础上,必须考虑各种随机误差的干扰,以保证鱼雷完成自导自适应之前不出现穿越目标尾流的可能。
4 鱼雷自导最小开机距离的应用
研究尾流自导鱼雷最小开机距离的根本目的在于如何根据鱼雷技术的需要把握作战使用方法,而作战使用过程中所关心的是鱼雷自导开机时机问题。在利用开机距离或者开机时间的前提下,为了科学合理地计算这一时机,在以自导方式射击时,当确定了发射态势和目标运动要素之后,应首先按照上述模型计算鱼雷的最小开机距离,然后依据发射方式和射击参数的解算结果计算鱼雷的自导开机距离。
4.1 自导鱼雷射击的鱼雷航程
在计算鱼雷最小开机距离的基础上,确定鱼雷自导开机时机可以用鱼雷出管后的航程确定,也可以用鱼雷出管后的时间确定。无论使用哪一种,都必须计算鱼雷从发射到进入预定瞄准点过程中鱼雷所经历的航程 St。为此,还需按照武器系统的射击控制方法计算鱼雷的这一航程。
依据发射态势和鱼雷技术要求,末端尾流自导鱼雷射击模式通常分为一次转角射击和二次转角射击两种。当潜艇在当前的位置点通过鱼雷一次转角能够满足鱼雷的进入角度要求时,采用一次转角射击。否则,如果鱼雷一次转角不能保证鱼雷以理想的角度进入尾流时,则需要进行第二次转角射击。因此,计算鱼雷的航程有以下两种情况。
1)一次转角射击时
如图2所示,利用转角射击方程式[7]可求得:

2)二次转角射击时
如图3所示,利用转角射击方程式[7]可求得:

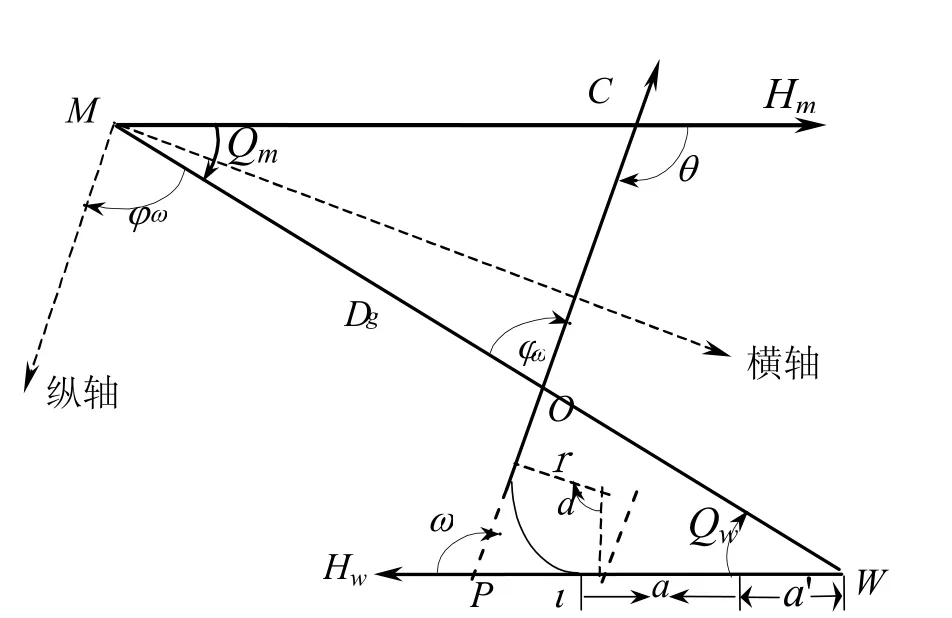
图2 一次转角射击

图3 二次转角射击
4.2 极限开机时机及应把握的问题
利用最小开机距离和鱼雷进入预定瞄准点的航程很容易确定鱼雷的极限开机时机,用鱼雷航程可表示为

或者,可用鱼雷航行时间表示为

上式考虑的是鱼雷不变速时的情形,变速时则应根据变速时机分段计算,由于鱼雷变速时机不尽相同,在此不详细展开分析。
可以看出,以上两式描述的是鱼雷的极限开机时机,即鱼雷按此时机开机,正好完成开机后即进入目标尾流;若鱼雷在这一时机仍未开机,将直接导致鱼雷穿越尾流、丢失目标;若过早于这一时机又将影响隐蔽性的战术要求。因此,在作战运用中,应依据各种误差的干扰程度确定开机时机。一般情况下,确定的开机时机应早于这一时机。
5 结束语
最小开机距离的概念及其算法揭示了尾流自导鱼雷射击控制的技术要求,给出了确定尾流自导鱼雷自导开机时机的依据。然而,由于其计算的复杂性,在应用中仅靠作战使用者的人工计算和估计,将难以满足高度紧张过程中的应用问题,其必然的要求就是象解算鱼雷的其它射击控制参数一样,利用作战系统的技术资源提供实时解算保障。由此,对提高尾流自导鱼雷的作战效能将是十分有益的。
[1]艾东.线导+尾流自导鱼雷导引方法应用探讨[J].指挥控制与仿真,2010,32(4):47-48.
[2]李刚强,黄文斌.线导鱼雷导引方法综述明[J].鱼雷技术,2003,l1(2):38-42.
[3]李本昌.尾流自导鱼雷射击瞄点及射击解算[J].潜艇学术研究,2000,79(2):33-34.
[4]夏佩伦.一种计算尾流自导鱼雷极限射距的方法[J].鱼雷技术,2008,16(2):50-52.
[5]王幸军,李本昌.线导鱼雷靶场散布分析[J].鱼雷技术,2006,14(2)54-56.
[6]张克辉,温洪,刘勇.目标运动要素误差对尾流自导鱼雷自导开机距离的影响[J].指挥控制与仿真,2010,32(5):102-104.
[7]赵正业.潜艇火控原理[M].北京:国防工业出版社,2003.