气动安装机械手的PLC控制
2011-08-23罗庚兴宁玉珊
罗庚兴,宁玉珊
LUO Geng-xing, NING Yu-shan
(广东松山职业技术学院,韶关 512126)
0 引言
气动机械手作为机械手的一种,具有结构简单、重量轻、动作迅速、工作可靠、节能和环保等优点而被广泛应用。气动安装机械手主要用于完成以下功能:选择要安装的小工件,从料仓中推出来,并用吸盘吸住安装到大工件中。
1 气动安装机械手的结构和工作原理
气动安装机械手的结构示意如图1所示。系统主要组成部分有:上料模块和安装模块。
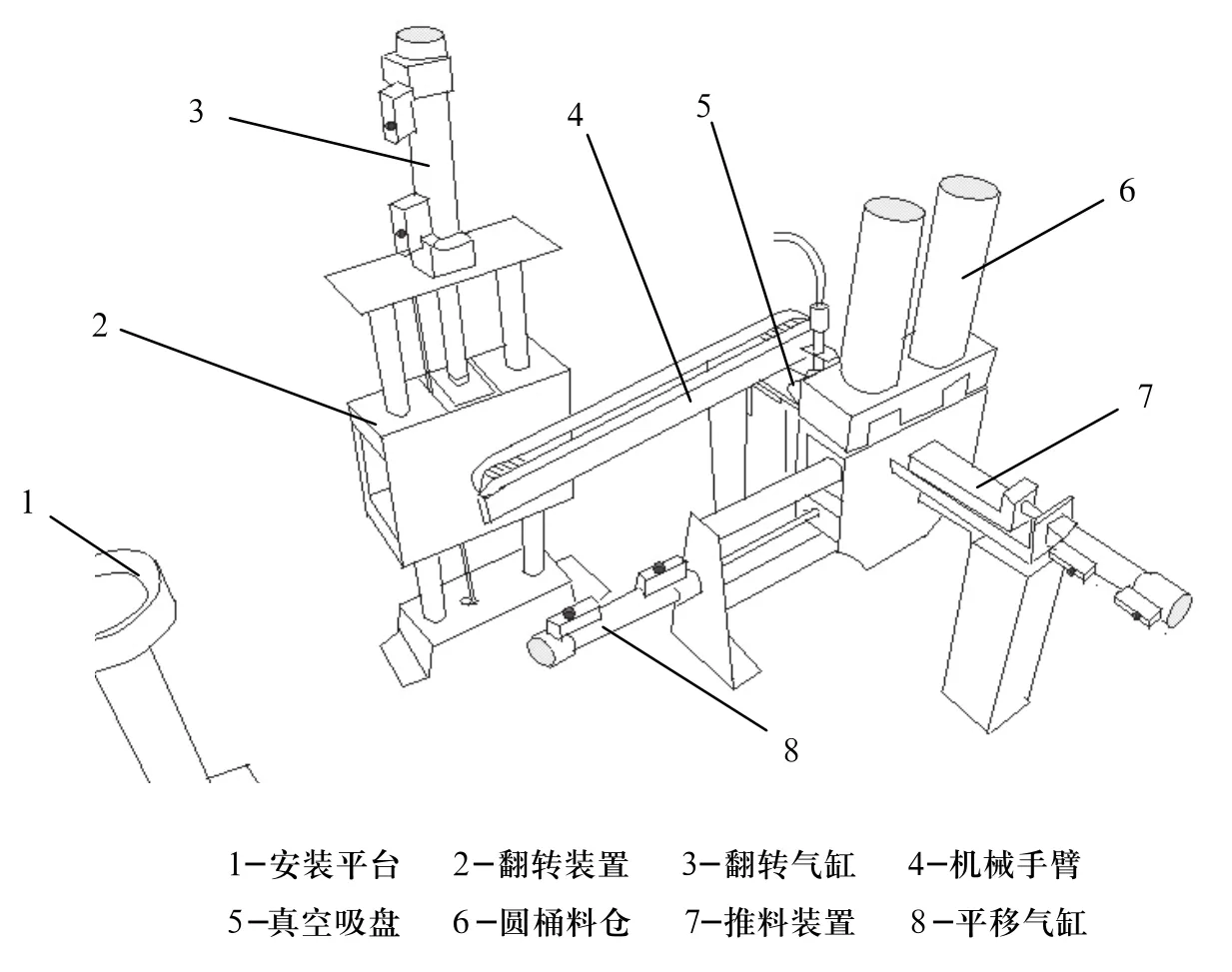
图1 气动安装机械手的结构示意图
上料模块主要由2个圆桶料仓、推料装置、料仓平移气缸和支架组成。上料模块主要用于依次将2个料仓中的工件2推放到吸料工作台上,等待吸盘机械手取料。在两个气缸的两端都安装有磁性开关,分别用于判断两个气缸运动的极限位置。推料气缸和平移气缸的配合靠延时来实现。
安装模块主要由真空发生器、吸盘、机械手、翻转气缸和翻转装置等组成。真空吸盘用于抓取工件2。吸盘内腔的负压(真空)是靠真空发生器产生的。安装模块工作过程:吸料→机械手向前翻转→安装(放料)→机械手向后翻转。
2 气动控制系统设计
气动安装机械手的气动控制回路如图2所示。
气动系统由气源、气动三联件OZ、电磁阀、节流阀、真空发生器和各种气缸组成。气源工作压力:最小6bar,最大8bar。翻转、平移换向阀采用二位五通双电控电磁阀,推料、吸料电磁阀采用二位五通单电控电磁阀。电磁阀均选用AIRTAC公司型号为4V110-M5的产品。气缸选用SMC公司的产品,翻转气缸1A选用CDM2B20-45型,平移气缸2A选用CDJ2B16-60-B型,推料气缸3A选用CDJ2B10-60-B型。为了使各执行元件运动平稳,各气缸2个气口装有单向节流阀。翻转前限/后限、平移左限/右限、推料伸限/收限的行程位置用气缸开关检测,气缸开关选用SMC公司的D-C73产品。真空发生器选用SMC公司的ZU07L型。
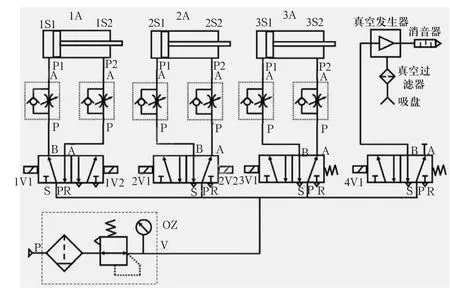
图2 气动控制回路
3 电气控制系统设计
3.1 PLC选型与I/O接口分配
PLC是气动安装机械手的核心控制器。根据控制要求分析,PLC的输入信号有:起停控制信号3个,位置检测信号6个,联络信号2个,共11个开关量输入信号;输出信号有:电磁阀控制信号6个,与前站的联络信号各1个,共7个开关量输出信号。输入输出信号的具体作用和地址分配如表1所示。继电器和电磁阀的线圈均为DC24V。选用三菱FX2N-48MR型PLC,24点直流输入,24点继电器型输出,并向外提供24V直流电源,完全可以满足控制要求。
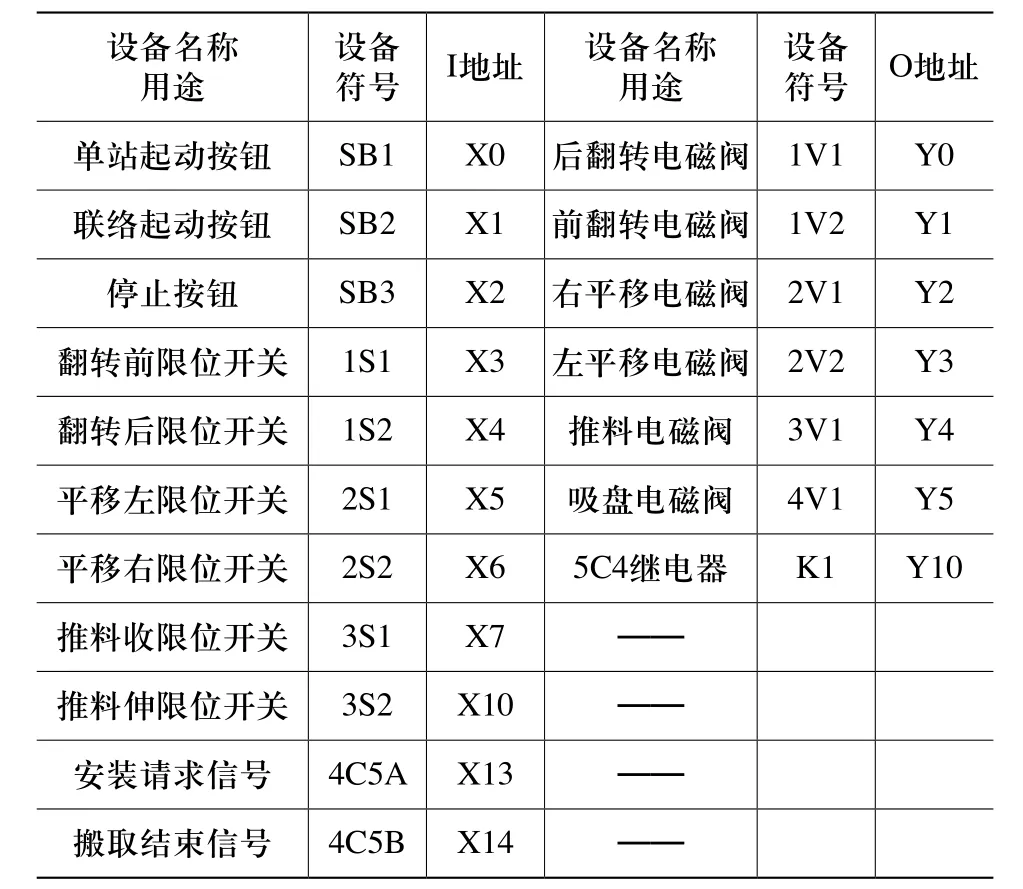
表1 气动安装机械手PLC的I/O地址分配表
气动安装机械手接受的通讯信号有两个:一个是大工件1放好在安装平台上,安装机械手接受到的安装请求信号4C5A;一个是安装好的工件从安装平台被取走后,安装机械手接受到的搬取结束信号4C5B,用于实现安装机械手复位。
气动安装机械手的通讯输出信号通过中间继电器来实现隔离。继电器K1用来传送气动安装机械手安装完毕、允许其他机械搬取工件的信号。
3.2 PLC控制程序
1)控制功能要求
气动安装机械手控制系统分为单站控制、联络控制和停止控制三种控制功能。
单站控制。初始时吸盘下有工件2,推料气缸、翻转气缸处于收回状态,平移动气缸可以在左或右位置。按下单站起动按钮SB1,安装模块完成依次完成如下动作:吸盘吸料→翻转气缸向前翻转→工件2被搬运到安装工作台→吸盘放料→延时→机械手向后翻转。工件2被吸取走后,上料模块主要完成以下动作:推料和更换料仓。推料完毕后,吸盘机械手才能向后翻转,回到原位。如果没有停止信号,气动安装机械手按照以上过程循环进行。此时,要注意安装工作台的工件要及时取走,否则容易损坏机械。
联络控制。当工件1被放置在安装工作台且安装搬运机械手离开后,气动安装机械手位于初始状态时,按下联络按钮SB2,气动安装机械手按照单站控制方式下的要求,完成一次工件2的上料和安装任务。如果没有停止信号,气动安装机械手在下一个工件1放置好后,自动进入下一工作周期。
停止控制。任何时候按下停止按钮SB3,控制系统在完成当前工作周期后停止工作。
2)工艺流程
按照上述控制要求,绘制气动安装机械手的工艺流程如图3所示。气动安装机械手的控制流程比较复杂。起动系统,进入安装等待步;单站方式或联络方式下有安装请求信号来后,吸料,吸料机械手向前翻转。放料控制和上料控制分支流程同时进行。上料控制分支流程又有左料仓上料和右料仓上料两种选择。上料完毕,吸料机械手向后翻转,此时气动安装机械手的机械返回到了原点。
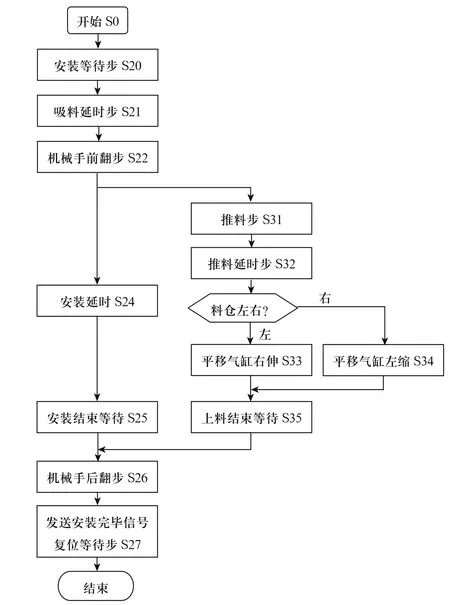
图3 安装机械手PLC控制工艺流程图
为了能使程序流程不出错,必须使程序的步进状态也要正确地返回原点。在S27步,发送安装完毕信号后,用第4站的联络信号——搬取结束信号4C5B作为程序步进状态返回原点的转换条件。
PLC的程序用步进指令编程实现,控制程序分为:安装等待、吸料、机械手前翻、安装、安装结束等待、推料、料仓判断、料仓左移或右移、上料结束等待、机械手后翻、发送联络信号及复位等待,加上初始步共13步动作。单站控制方式和联络控制方式的程序共用。在安装等待步,如果是单站工作方式,则延时后进入下一步,如果是联络工作方式,则等待安装请求信号,信号有效时,才进入下一步。为了避免两种控制方式冲突,在步进控制程序外的控制方式选择程序中,需设置两种控制方式的互锁。
4 结束语
气动安装机械手是较复杂的一个控制系统,主要体现在它的机械动作复杂,电气控制联锁关系较多。采用PLC对气动安装机械手进行自动控制,既解决了本系统上料模块和安装模块、推料气缸和平移气缸之间的互锁关系,也解决了本系统与其他机械单元之间的协同作业,很好地实现了气动安装机械手的上料、吸料、安装和联络等功能。控制系统经过运行调试,设备动作顺畅、性能稳定、可靠性高。
[1]黄伟玲.基于PLC的气动搬运机械手设计[J].煤矿机械,2009, (30):20-22.
[2]MITSUBISHI公司.FX2N系列微型可编程控制器使用手册[K].
[3]吴明亮, 蔡夕忠主编.可编程控制器实训教程[M].北京:化学工业出版社, 2005.
[4]刘增辉.模块化生产加工系统应用技术[M].北京:电子工业出版社, 2005.
[5]姜佩东.液压与气动技术[M].北京:高等教育出版社, 2002.
