局部高空间分辨率的应用适应性PET系统设计初探
2011-08-17刘晶晶谢庆国
刘晶晶,谢庆国
(1.武汉光电国家实验室(筹),武汉 430074;2.华中科技大学计算机科学与技术学院,武汉 430074;3.华中科技大学生命科学与技术学院,武汉430074)
1 前言
正电子发射断层成像(positron emission tomography,PET)能无创、定量、动态地评估人体内各种器官的代谢水平、生化反应、功能活动和灌注效果,能够对肿瘤、心脏系统疾病和神经系统疾病等进行早期诊断和分期,在重大疾病的预防和治疗中具有独特的、重要的价值[1~5]。
空间分辨率一直是PET成像仪中最重要的性能指标之一。空间分辨率越高,意味着能够检测到更小的病灶,而早期癌症的病灶往往尺寸较小,因而,具有高空间分辨率的PET仪器能够提高早期癌症检测率。过去,许多研究者一直致力于提高PET系统的空间分辨率[6~10],商用PET仪器开发也一直将空间分辨率这一性能的提高作为里程碑式的关键参数之一[11~13]。
一般人们所感兴趣的区域仅为视场里一小块区域(或病灶),仅仅需要在感兴趣区域获得高质量图像。传统的PET探测系统采用通用设计模式,追求视场范围内整体性能的提高,这样势必会在非感兴趣区域造成一定程度上的性能闲置和浪费。通用设计模式下,探测模块之间相对固定且性能基本完全一致,成像仪器一旦建造完成,各项性能指标几乎完全固定,不能在应用需求提高或变化时进行相应调整或修改。如果想在实际应用中获得更高的性能参数,只能对设备再行搭建或购置新的性能更高的PET系统。高昂的更新成本和过慢的更新速度不仅限制了PET应用,还使得某些科学研究难以进一步深入。
目前,有少数几个研究组尝试在传统PET系统中插入具有高固有空间分辨率的探测模块贴近被检测对象,在局部区域获得高的空间分辨率[14~20]。文献[14]提出了一种具有两种固有空间分辨率的非对称PET系统,通过插入一半环形结构的、具有高固有空间分辨率的探测模块以获得针对感兴趣区域的高空间分辨率。该插入式的高性能探测模块能够特别为一些特殊部位(如乳房、颈、头等)的部分区域带来高的成像性能[14~18]。然而,如何根据感兴趣区域位置和大小规划调整高固有空间分辨率探测模块的布局仍然有待进一步研究。“插入式”设计虽然可以以较小的代价在一定程度上提升PET系统在感兴趣区域内的成像质量,但仍然存在一系列的问题,如:a.不易于做归一化、散射等校正;b.在视场内插入高性能探测模块可能带来操作上的不便,尤其是随着现代PET系统有效视场越做越大,其操作空间更加有限;c.可能会给被检测对象带来不舒适感。
文章提出一种具有两种(或多种)高低不同性能探测模块的PET探测系统,采用“替换式”结构设计,在原有探测环上替换部分普通性能探测模块为高性能探测模块,并根据应用对象特点、感兴趣区域特性,结合应用需求,适应性调整PET探测系统结构,规划PET探测模块性能参数,在感兴趣区域获得局部高质量图像。该套系统原型能够在成本和性能上获得折中,并且随着数字化、模块化PET技术的发展[21~23],更新将更容易、更快捷。未来 PET 的更新换代可能演变为为数不多的探测模块的升级,这种设计理念在近几年国内外其他仪器如SPECT和MRI等的竞相研制中,显示了它的优势以及很强的竞争能力。
以商用 GE Discovery LS[13](GEDLS)为系统几何结构原型,研究具有高低两种空间分辨率的探测模块的PET探测系统的性能,其中,高性能探测模块在探测环上采用连续的一段式分布。为研究高性能探测模块的布局对视场中重建图像的空间分辨率的影响,分别针对具有不同数量和位置的高性能探测模块的探测系统,对全部为普通性能探测模块和高性能探测模块的PET探测系统进行了分析和评估。
2 空间分辨率的影响因素
PET系统的空间分辨率受到探测器固有空间分辨率、正子范围、γ光子非共线性等因素的影响[15,24]。对探测系统中的中心点,其空间分辨率R的经验公式为:

式(1)中,A为重建算法对空间分辨率的影响;p为正子范围;s为射源尺寸;D为系统探测器直径,(0.0022D)2用于表征γ光子非共线性对系统空间分辨率的贡献;d为晶体宽度,(d/2)2表征探测器固有空间分辨率对系统空间分辨率的贡献;b为探测模块对空间分辨率的影响。γ光子非共线性和探测器固有空间分辨率对探测环中不同位置的点的影响不同。在文章中,仅考虑探测器固有空间分辨率对系统空间分辨率的影响。对于探测器中任意点,其空间分辨率模型[15]如图1所示。
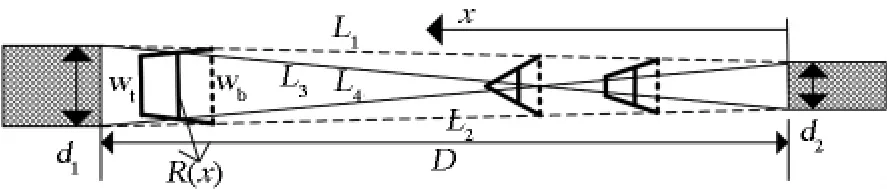
图1 探测器固有空间分辨率对各位置点空间分辨率的影响Fig.1 The influence of the detector’s intrinsic spatial resolution on the spatial resolution at different sites
对位于x处的点,其空间分辨率半高全宽(full width at half maximum,FWHM)为:

3 实验设计
3.1 系统原型
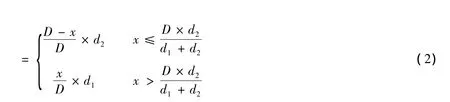
以单环的GEDLS作为仿真系统几何结构原型(见图2(a)),该系统具有56个探测模块,每个模块由两个模组组成。系统中包含两种固有空间分辨率的探测模块(见图2(b)),其中,普通性能探测模块中的晶体大小为4 mm×8 mm×30 mm,包含12个锗酸铋(Bi3Ge4O12,BGO)晶体,高性能探测模块中的晶体大小为2 mm×8 mm×30 mm,共含24个BGO晶体。
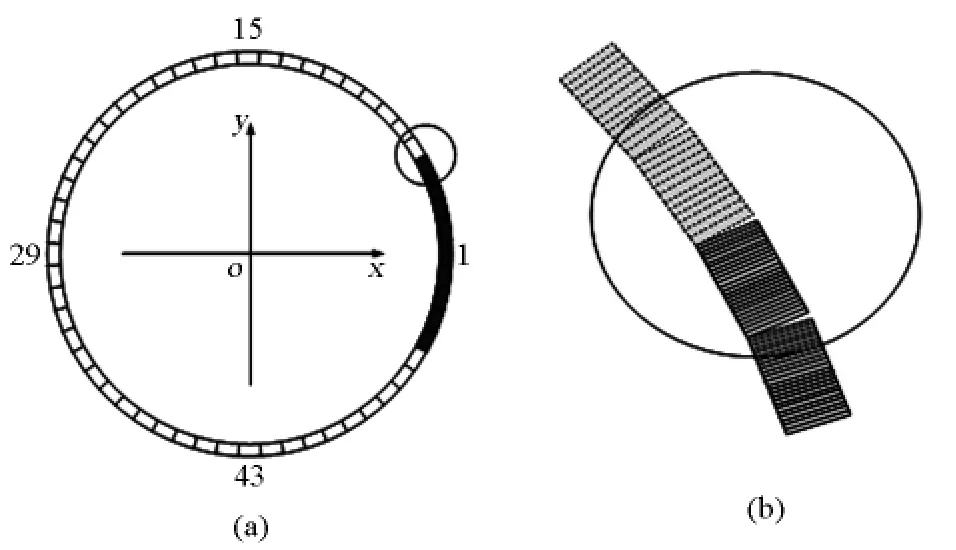
图2 局部高空间分辨率的应用适应性PET系统结构示意图Fig.2 The schematic of the adaptive PET prototype with local high spatial resolution
3.2 仿真平台和重建方法
采用蒙特卡罗仿真软件包GATE(Geant 4 Application Tomographic Emission)对局部高空间分辨率的适应性系统建模。为避免其他物理因素干扰,在仿真中屏蔽了正电子范围、光子非共线性、时间模糊、能量模糊等效应的影响。重建时,先进行归一化校正,然后,采用最大似然估计期望最大化方法(maximum likelihood expectation maximization,MLEM)实现图像重建,其系统响应矩阵采用Raytracing获得[25],未对晶体间的穿透效应、立体角等因素建模。二维重建图像像素的尺寸为1 mm×1 mm。
3.3 仿真方案
3.3.1 仿真点布局
在x轴正向设置10个仿真点,各点坐标如表1所示,相邻两点间的间隔均为50 mm。仿真时,每个点源设置活度相同,仿真时间相同,并且保证每个点源仿真获取的数据量足够大。
表1 仿真点坐标Table 1 Coordinates of the simulated source points
3.3.2 高性能探测模块布局
文章研究的高性能探测模块采用连续一段式分布,其布局包括所含高性能探测模块的个数和所处的位置。为分析高性能探测模块的布局位置对视域内不同位置点的空间分辨率的影响,采用固定仿真点、旋转探测系统的方式,每次逆时针旋转一个探测模块位置,即连续分布的高性能探测模块同时逆时针旋转一个探测模块位置,共获得29个不同的布局位置。布局位置的编号与连续分布的高性能探测模块中心探测模块的编号一致。第一个布局位置如图2(a)所示,其中连续分布的高性能探测模块最中间的探测模块的中心在x正向轴上。文章对比分析了具有3个和9个高性能探测模块的探测系统的性能。
4 结果与分析
4.1 高性能探测模块布局位置对视场中各点空间分辨率的影响
图3是具有连续9个高性能探测模块的探测系统其O~I点在不同的位置下的重建图像结果。从图3可以看出,系统“1”、“3”和“5”下的各位置点的重建结果与系统“2 mm”接近,具有明显的切向方向空间分辨率的提升,并且离中心越远的位置点其点扩散程度与系统“2 mm”越相似,越靠近中心的位置点其空间分辨率提升度越小。系统“7”至“29”下各位置点的重建结果与系统“4 mm”基本一致。
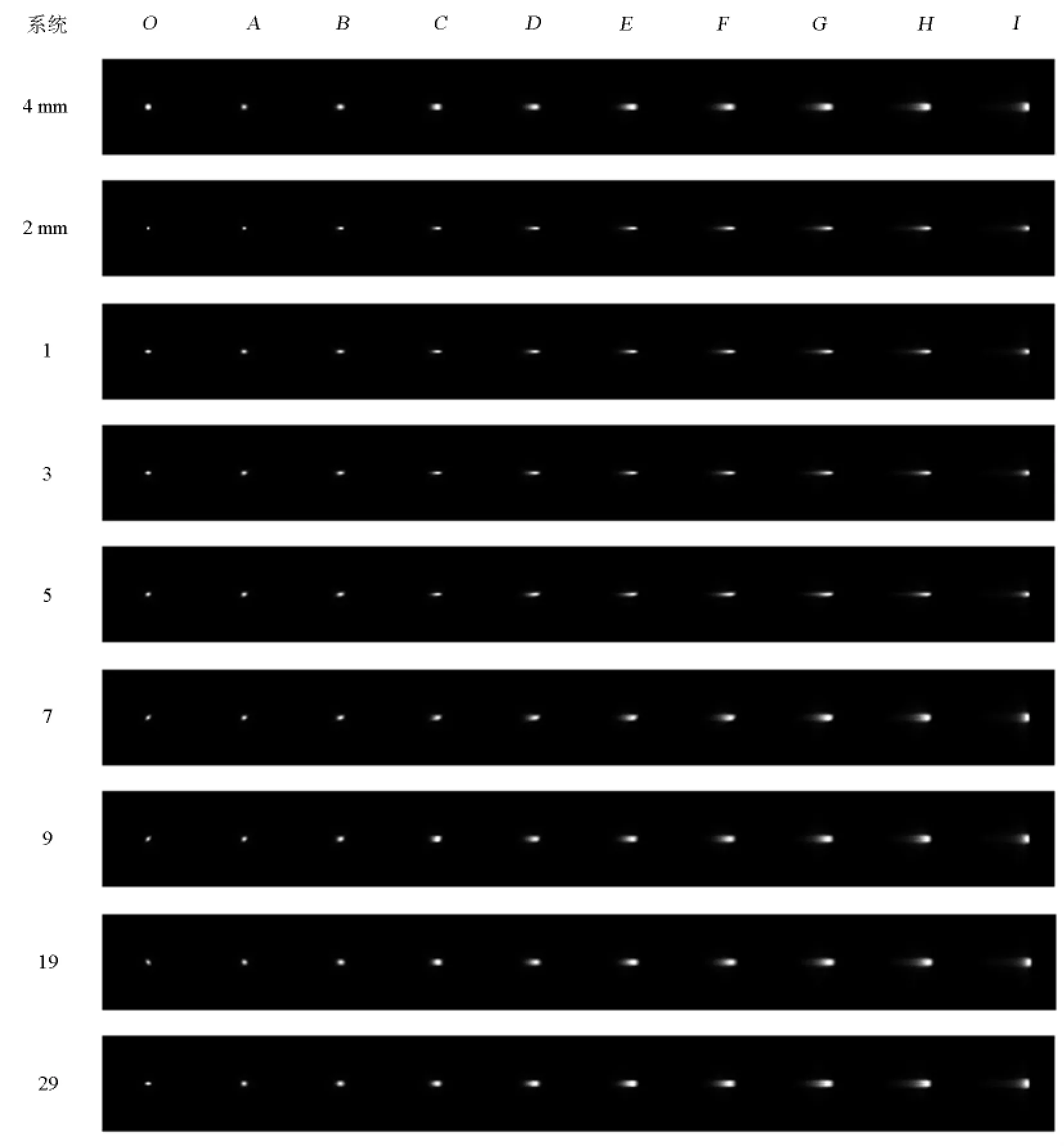
图3 O~I点在不同探测系统下的重建结果Fig.3 The reconstructed images of point O ~ I under different systems
图4 是点 O ~I在系统“1”、“3”、“5”、“7”、“9”和“11”下,各点在各个方向上的空间分辨率的对比情况。从图4中可以看出,点O、A和B在各个系统下、各个方向上的空间分辨率变化不大,相比系统“4 mm”略有提升;点C ~I在系统“1”、“3”和“5”下具有较大提升,基本趋近于系统“2 mm”下的重建结果,其中,在系统“5”下的提升程度略有变弱,而在系统“7”、“9”和“11”下,其分辨率快速趋向系统“4 mm”,其中,在系统“7”下略有提升。该结果与图3的重建结果一致。
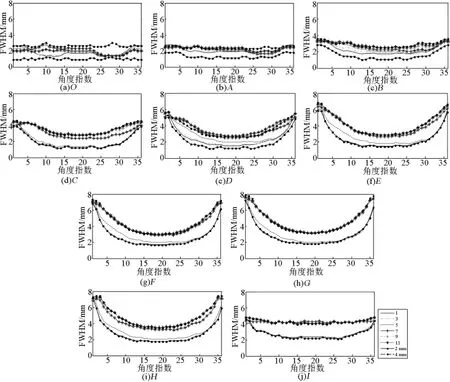
图4 O ~I点在系统“1”、“3”、“5”、“7”、“9”和“11”下的各个方向的空间分辨率Fig.4 Spatial resolution in different angles under system“1”,“3”,“5”,“7”,“9”and“11”
对于GEDLS探测器,在x轴上各点的理论切向空间分辨率如图5(a)所示,仿真获得的切向空间分辨率如图5(b)所示,两者基本一致。

图5 x轴上各点切向空间分辨率Fig.5 The tangential spatial resolution of points on axis x
4.2 高性能模块数量对视场各点空间分辨率的影响
为了分析高性能探测模块的数量对视场各点空间分辨率的影响,对比分析了在具有连续3个高性能探测模块的探测系统下,O~I点在不同的高性能探测模块布局位置下的空间分辨率,如图6所示。从图6中可以看出,对O~B点,具有3个和9个高性能探测模块的探测系统在系统“1”至“3”时有所差异;而对C~I点,具有3个和9个高性能探测模块的探测系统在系统“1”时基本接近,在系统“2”时稍有差异,在系统“3”时差异逐渐变大。

图6 具有3个和9个高性能探测模块的探测系统的性能对比Fig.6 Spatial resolution comparison between the proposed systems composed of 3 and 9 continuous high performance detectors
5 结语
文章提出了一种应用适应性PET系统原型,该系统探测环由两种不同固有空间分辨率的探测模块构成,这种结构有潜力在些微增加系统成本的条件下,根据应用对象的特点、感兴趣区域特性和应用需求,适应性地调整PET探测系统中探测模块的构成和布局,实现局部高性能的成像。
为验证这种原型机的性能,文章采用GATE仿真的方法,初步分析了在具有两种不同空间分辨率的探测模块的PET探测系统下,高性能探测模块在原探测环上采用一段式连续分布时,不同的高性能探测模块的布局对视场不同位置点的空间分辨率的影响。仿真实验的结果表明,这种替换式的应用适应性PET系统结构,能够为局部区域带来高空间分辨率。
进一步分析实验结果,对视场中同一个位置点,当高性能模块处于不同布局位置时,其空间分辨率提升程度不同。当高性能模块的中心与视场中心的连线和该位置点与视场中心连线相同时,提升程度最大,当这两条连线逐渐偏离时,其提升程度也随之逐渐减弱。换言之,在高性能探测模块与中心点连线所覆盖的扇形区域中,处于扇形区域中心的扇束的提升程度最大,慢慢偏离扇形区域中心则提升程度逐渐降低。对视场中不同位置点,当高性能模块处于同一布局位置时,不同位置点的空间分辨率提升程度不同,越靠近外围的高性能探测模块的位置点的提升比例越高。
文章也初步分析了高性能探测模块数量与空间分辨率提升程度的相关性。对比分析了含有3个和9个高性能探测模块的探测系统,高性能模块的中心与视场中心的连线和该位置点与视场中心连线相同时,视场内靠近外围高性能探测模块的位置点的提升程度基本一致,靠近中心的位置点的提升程度有所差异。
靠近中间区域的空间分辨率提升程度不大,笔者猜测这是由于采用“连续一段式”布局的结果,在接下来的工作中,将进一步研究如何对高性能探测模块进行布局以获得中央区域的高空间分辨率。
文章仅分析了这种应用适应性PET系统原型对空间分辨率的影响,并未研究其对重建图像区域特性如信噪比等的作用,在后期工作中将进行深入分析。在重建过程中采用的系统响应矩阵未对晶体穿透效应、立体角等进行建模,并且在仿真实验中,未考虑光子非共线性、正电子范围等物理因素,在下一步工作中将给予考虑。
致谢 文章部分计算任务是在云南省计算机技术应用重点实验室、服务计算技术与系统教育部重点实验室/集群与网格计算湖北省重点实验室高性能计算中心(SCTS/CGCL HPCC)的高性能计算服务器上完成的;赵松年、肖鹏、高建民等参与了文章相关研究方向的讨论并提出了修改意见;曹孝卿、万陆、郭金霞等人为文章提供了GATE仿真方面的帮助,在此一并表示感谢。
[1]Phelps M E.PET:The merging of biology and imaging into molecular imaging[J].Journal of Nuclear Medicine,2000,41:661 -681.
[2]Nichol C,Kim E E.Molecular imaging and gene therapy[J].Journal of Nuclear Medicine,2001,42:1368-1373.
[3]Ursula Nestle,Wolfgang Weber,Michael Hentschel,et al.Biological imaging in radiation therapy:Role of positron emission tomography[J].Physics in Medicine and Biology,2009,54:1 -25.
[4]Lancelot S,Zimmer L.Small-animal positron emission tomography as a tool for neuropharmacology[J].Trends in Pharmacological Sciences,2010,31(9):411 -417.
[5]Jennings J R,Christie I C,Muldoon M F,et al.Brain function,cognition,and the blood pressure response to pharmacological treatment[J].Psychosomatic Medicine,2010,72(7):702 -711.
[6]Jennifer R Stickel,Simon R Cherry.High-resolution PET detector design:Modeling components of intrinsic spatial resolution[J].Physics in Medicine and Biology,2005,50:179-195.
[7]John A Kennedy,Ora Israel,Alex Frenkel,et al.Super-resolution in PET imaging[J].IEEE Transactions on Medical Imaging,2006,25(2):137-147.
[8]Suleman Surti,Ryan Scheuermann,Matthew E Werner,et al.Improved spatial resolution in PET scanners using sampling techniques[J].IEEE Transactions on Nuclear Science,2009,56(3):596-601.
[9]Seiichi Yamamoto,Masao Imaizumi,Tadashi Watabe,et al.Development of a Si-PM-based high-resolution PET system for small animals[J].Physics in Medicine and Biology,2009,55:5817 -5831.
[10]Vandenbrouche A,Foudray A M ,Olcott P D,et al.Performance characterization of a new high resolution PET scintillation detector[J].Physics in Medicine and Biology,2010,55(19):5895-5911.
[11]de Jong H W,van Velden F H,Kloet R W,et al.Performance evaluation of the ECAT HRRT:an LSO-LYSO double layer high resolution,high sensitivity scanner[J].Physics in Medicine and Biology,2007,52(5):1505 -1526.
[12]Cristian C Constantinescu,Jogeshwar Mukherjee.Performance evaluation of an inveon PET preclinical scanner[J].Physics in Medicine and Biology,2009,54:2885-2899.
[13]Parham Geramifar,Mohammad Reza Ay,Mojtaba Shamsaie Zafarghandi,et al.Performance comparison of four commercial GE discovery PET/CT scanners:a Monte Carlo study using GATE[J].Journal of Nuclear Medicine,2009,17(2):26 -33.
[14]Wu Heyu,Debashish Pal,Joseph A,et al.A feasibility study of a prototype PET insert device to convert a general-purpose animal PET scanner to higher resolution[J].Journal of Nuclear Medicine,2007,49:79-87.
[15]Tai Yuan-Chuan,Wu Heyu,Debashish Pal,et al.Virtual-pinhole PET[J].Journal of Nuclear Medicine,2008,49(3):471-479.
[16]Tai Yuan-Chuan,Laforest R,Ruangma A.Design study of a de-tector insert for high resolution clinical PET imaging[C]//IEEE 2003 Nuclear Science Symposium Conference,2003:1714-1717.
[17]Janecek M,Wu Heyu,Tai Yuan-Chuan.A simulation study of the design of a prototype insert for whole-body PET scanners[J].IEEE Transactions on Nuclear Medicine,2006,53:1143-1149.
[18]Wu Heyu,Tae Yong Song,Debashish Pal,et al.A high resolution PET insert system for clinical PET/CT scanners[C]//IEEE 2008 Nuclear Science Symposium Conference,2008:5442-5444.
[19]Zhou Jian,Qi Jinyi.Theoretical analysis and simulation study of a high-resolution zoom-in PET system[J].Physics in Medicine and Biology,2009,54:5193-5208.
[20]Zhou Jian,Qi Jinyi.Adaptive imaging for lesion detection using a zoom-in PET system[J].IEEE Transactions on Medical Imaging,2011,30(1):119-130.
[21]Xie Qingguo,Kao Chien-Min,Xia Rongsheng,et al.A simple all-digital PET system[C]//Proceedings of SPIE.2007,6510:41.
[22]Xie Qingguo,Kao Chien-Min,Zekai Hsiau,et al.A new approach for pulse processing in positron emission tomography[J].IEEE Transactions on Nuclear Science,2005,52(4):988 -995.
[23]Xie Qingguo,Kao Chien-Min,Wang Xi,et al.Potentials of digitally sampling scintillation pulses in timing determination in PET[J].IEEE Transactions on Nuclear Science,2009,56(5):2607-2613.
[24]Moses W W,Derenzo S E.Empirical observation of resolution degradation in positron emission tomographs utilizing block detectors[J].Journal of Nuclear Medicine,1993,34:101.
[25]Siddon R L.Fast calculation of the exact radiological path for a three-dimensional CT array[J].Medical Physics,1985,12(2):252-255.
