城轨车辆在ATO模式下停车精度问题的分析与探讨
2011-08-08王鹏飞樊贵新王新海姜岩峰
王鹏飞,樊贵新,王新海,姜岩峰
(中国铁道科学研究院 机车车辆研究所,北京100081)
目前,城市轨道交通在我国各大中城市发展得很快,轨道交通具有快速、准时、安全、舒适的特点。城市轨道交通车辆普遍采用自动驾驶(ATO)模式,降低司机的工作强度,保证列车高效运行。实际运用中,列车的停车位置会出现偏差。
在有屏蔽门的车站,列车进站停车不准确,列车车门与车站屏蔽门不能精确对位,影响乘客顺利上下车。
城市轨道交通列车发车密度较大,严格按照时刻表运行。在此情况下,列车进站停车位置不精确会直接影响到列车的准点运行,降低准点率。笔者全程参与了天津滨海二期列车制动系统国产化车辆的停车精度调试试验,针对ATO模式下出现的停车精度问题进行分析,并提出改进的措施。
1 ATO控制原理
ATO(列车自动驾驶)系统是地铁列车准确、平稳停车的重要保障。ATO子系统可以完成列车驾驶员的工作,这些工作包括列车平稳运行,速度调整,在站台的适当停车位平稳停车。ATO辅助ATP(列车自动保护装置)工作,接受来自ATP的信息,其中有ATP速度指令、列车实际速度和列车走行距离。ATO通过牵引/制动线控制列车,使其维持在一个参考速度上运行,并实现准确停车。
ATO系统处于自动运行模式时,控制列车的牵引和制动装置。程序停车通过站台轨道的车地通讯设备线圈来完成,车地通讯设备线圈每40英尺有一个交叉,当列车通过这些交叉点时,磁场相互抵消,信号消失。ATO监测这些信号的消失并使用距离信息,来计算列车在轨道上的位置,从而把车停在适当的位置。自动停车参考列车速度曲线来减速,在列车到达停车地点时,将速率降至零。
车门控制功能操作车门的开启和关闭,列车只有完全进入站台停稳且所有车门处于站台内,才能打开车门,ATO和ATP系统共同完成这一功能。通常情况下,在接收到轨旁ATP子系统发送的停车位且车载ATP子系统确定列车速度为零后,车门会被车载ATO子系统打开。在接到通过车地通讯设备线圈传输的轨旁ATO的指令之后,关闭车门。这一程序使控制中心控制下的轨旁ATO子系统可以操纵列车以开启或关闭车门状态停留在站台。
2 天津滨海线国产化制动控制系统
中国铁道科学研究院机车车辆研究所(简称“铁科院机辆所”)作为城轨制动系统国产化的供应商,已经在天津滨海线、沈阳地铁2号线、北京地铁昌平线、房山线、重庆地铁1号线、广州地铁3号线北延段、天津地铁3号线、成都地铁2号线等项目中提供了车辆制动系统。
天津滨海二期车采用铁科院机辆所的制动控制系统,该系统为微机控制模拟直通电空制动系统。
该制动系统框图如图1所示,主要由列车制动控制单元、制动作用单元和基础制动装置组成。
列车制动控制单元主要由司机控制器、车辆监控器(TMS)、列车制动逻辑部分、编码器4部分组成。司机控制器产生牵引/制动控制指令,编码器将控制指令的模拟量输出部分转换为列车PWM传送方式的指令,制动逻辑部分对司机控制器指令、紧急制动指令、安全警惕防护指令、ATP等实施必要的联锁控制,车辆监控器用于向车辆上各工作单元传送控制指令、采集各单元或模块的信息以及完成本车辆与列车其他车辆间的数据交互。
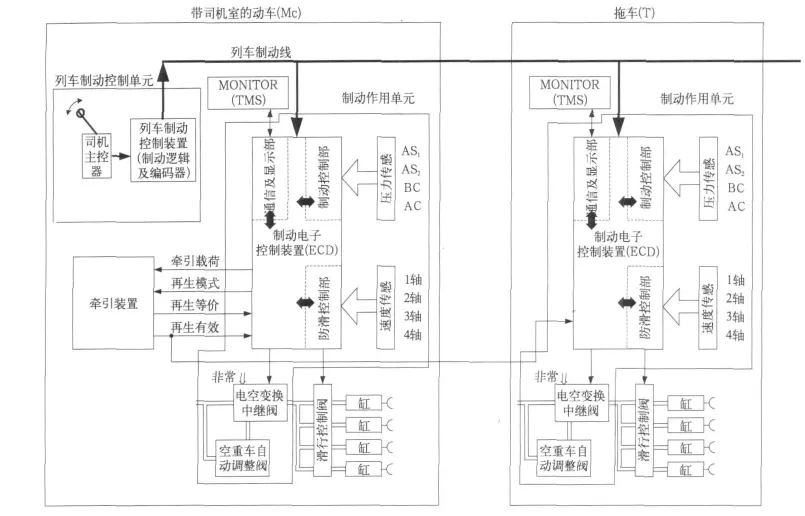
图1 城轨交通车辆微机控制模拟直通电空制动系统框图
3 停车位置不准确原因分析
城轨列车进站时停车不准确分为“超停”和“欠停”两种。
一般来说“超停”指实际停车位置超出停车标0.5 m以上;“欠停”指城轨列车实际停车位置未到停车标0.5 m以内。
3.1 产生超停的原因
(1)速度检测不准
ATO模式下进站,制动系统进行减速度控制,速度检测出现偏差(如列车实际速度高于检测值)或者由于制动的实际减速度低于理论减速度,导致制动距离增大而造成超停。
信号系统通过装在头车(动车)的1、4轴的轴端速度传感器所采集的速度信号易出现偏差,当车辆出现滑行时,信号系统采集的速度比真实的速度低,因此信号系统检测到的减速度也偏低,从而造成测速不准,制动指令与实际制动力需求指令有差距,最终导致列车进站停车不精确。
为测试信号检测速度偏差对停车位置的影响,2009年7月28日晚,天津滨海131列车ATO模式由胡家园上行到钢管公司区间试验时,将信号系统的轮径值设为最小值770 mm,结果该列车在钢管公司停车位置超出站台28 m。由于将轮径值设小,信号系统检测到的速度小于实际速度较多,造成进站时实际速度过高,出现超停现象。
(2)电制动发挥受限
城轨列车制动系统包括电制动和空气制动两种方式。正常情况下,城轨列车优先采用电制动(包括再生制动和电阻制动),其次是空气制动;电制动不足时,由空气制动补足剩余部分制动力。由于空气制动受摩擦系数及闸瓦等因素影响,从而使制动减速度会受到影响而降低。
电制动充分发挥有利于控制停车位置。当城轨列车在接触网电压较高时采用电制动,如果供电系统没有加装地面吸收装置,且同一供电区间内无其他较大负载运行,再生制动反馈的电能将引起网压升高并超过再生制动方式转换的限值,城轨列车将根据网压值逐步自动切除再生制动,转变为电阻制动。多次进行电阻制动会使制动电阻温度快速上升,为确保安全,电阻温度不致过高,系统会限定电阻制动投入的时间。因此,如果网压始终较高,城轨列车将减少再生制动的使用,只能长时间频繁地采用空气制动。
(3)频繁施加空气制动
制动控制系统采用空气制动时,能够保证正常制动停车精度。但如果过于频繁地进行空气制动,闸瓦、闸片与轮对踏面、制动盘持续摩擦,致使摩擦表面温度上升,摩擦系数将逐渐减小,减速度降低,从而导致超停。过多采用空气制动会造成闸瓦、闸片与车轮、制动盘磨耗加大,降低使用寿命,增加运营和维护成本。
天津滨海2期130车于2009年8月19日晚到20日凌晨在正线进行信号系统调试,上行区间采用空气制动,下行区间为空电混合制动。该车先是从胡家园-东海路运行两个往返12站,然后由胡家园-中山门运行两个往返12站,制动停车精度均正常。从中山门第2次下行到胡家园区间,新立下行到东丽开发区停车时出现超停300 cm。如图2,此时有电制信号,但电制动力未施加,列车又匀速运行了17 m(见图2中注释处),此时需要空气制动补足。从数据曲线分析,停车过程中PWM 指令为73.3%时,实际平均减速度为0.78 m/s2,而理论减速度应为1.0 m/s2,但是由于此前空气制动施加过多导致闸瓦发热,制动系统虽然响应ATO制动指令,无法达到理想减速度,造成超停。
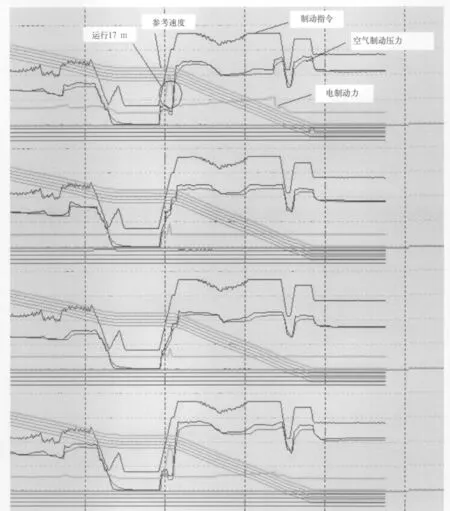
图2 信号系统调试的制动超停曲线
3.2 产生欠停的原因
信号系统出于安全考虑,将轮径设为高值850 mm,而实际新车轮径在845 mm左右,这样使得信号系统检测的速度值略微高于实际速度值。对制动停车位置来说影响不大,但会造成停车位置未到停车标的情况居多。
天津滨海2期131车在正线上进行了多次信号系统的调试,停车精度正常,停车位置为停车标的±50 cm内,而且多表现为未到停车标50 cm以内。
4 提高停车精度措施
城轨列车停车精度是个综合性的问题,可以考虑通过如下措施来提高停车精度。
(1)调整轮径参数
通过信号系统调整轮径参数,车辆运行一段时间后轮对会有不同程度的磨耗,在车辆月修或旋轮后用车轮外形测试仪进行轮径测量,轮径值发生变化要适时调整,通过调节信号控制机柜内的CPU控制卡的拨码开关可以修正轮径值,以保证信号系统检测速度的准确性。
(2)提高采集速度精度
在条件允许的情况下,尽量采集拖车车轴上的速度传感器信息,这样测得的速度更接近于列车实际速度,使列车制动指令与实际制动力需求指令相符,容易保证列车进站准确停车。
(3)充分发挥电制动
在运行线路上设置电网吸收装置,充分利用电网吸收装置以便更好发挥电制动的能力,减少空气制动,以避免发生超停问题。
(4)调整减速度或降低进站速度
进站停车过程中,由于存在电气或机械误差,实际减速度将低于理论减速度。适当提高ATO最大减速度指令或适当降低进站速度,在外部条件变化时(例如电制动发挥不好,闸瓦摩擦系数下降),延长制动控制的调节时间,便于发挥空气制动,减少超停现象。
[1]樊贵新,林祜亭,李和平,等.城轨制动系统工程化研究报告[R].中国铁道科学研究院机车车辆研究所,2008.
[2]滨海快速轨道交通公司课程OV2系统设计参数[C].2003.
[3]禹宏鹏.城轨列车停车位置不精确的原因及对策[J].城市轨道交通研究,2008,(9):28-30.
