基于键合图模型的新型故障树故障诊断方法
2011-07-26帕孜来提马合木提
帕孜来提·马合木提 张 健
(新疆大学电气工程学院,新疆 乌鲁木齐 830049)
0 引言
传统故障树的生成基本上依赖于工作人员凭借经验对可能发生的故障进行预计、对过去发生过的故障事例及故障统计进行广泛的调查来得到[1]。这种方法对系统故障的分析并不全面,而且应用较繁琐。
键合图模型作为一种知识表示法,不需要用户提供系统的精确参数,它是通过分析系统的能量传递来描述系统的动态行为。这种知识表示法对于创建复杂的结构因果推理关系是非常合理有效的,具有很好的应用前景[2]。
本文探讨了一种根据系统键合图模型建立故障树来进行系统故障诊断的方法,此方法属于故障定性诊断法,只需得到特征值的变化趋势即可。与定量故障诊断方法相比较,该方法计算量小,且对模型精确度要求相对较低,更具灵活性和有效性[3]。
1 故障诊断方法流程
基于键合图模型的故障树故障诊断方法的流程图如图1所示。由流程图可知,该方法的核心是系统故障树的获取。
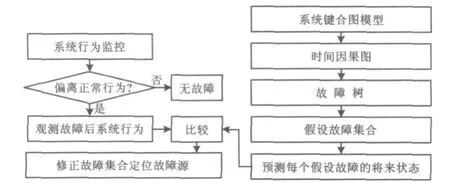
图1 故障诊断方法流程图Fig.1 Flowchart of the new type of fault diagnosis method
故障树是根据键合图模型中提供的系统元件参数和变量间的因果关系推理得出的,键合图模型的各个元件中涉及的所有参数和变量统一分为起因和结果两大类。
键合图模型描述系统变量之间的关系,系统变量与键合图的键相联系,由势变量e与流变量f组成。e与f之间的关系取决于键合图元件定义的方程与键合图上标注的因果关系。
根据键合图因果关系的设置规则可知,键合图基本元素(简称键合图元)可能获得的因果关系的分配是不同的[4]。
键合图中的九个基本元件为:结(0结、1结)、源(Se、Sf)、阻抗(R、C、I)、转换器 GY 和变换器 TF,根据表示其特性的数学方程标注其因果关系。容性和惯性键合图元根据预先设定的积分或微分形式的不同,它们所对应的因果关系也不同;阻性键合图元的因果关系可按与其他元件因果关系匹配任意选取;0结或1结属于多通口键合图元,其因果关系比较复杂,主要取决于其定性表达式的形式[5]。
2 时间因果图
为解决具有非线性、耦合性的多领域复杂混合系统的故障诊断问题,在基于定性模型诊断方法和信号处理等技术的基础上,Mosterman提出用键合图模型建立时间因果图(time causal graph,TCG)来进行故障诊断的方法。
因果图用来描述系统参数与变量之间的因果关系,时间因果图则是包含时间特性关系的增广因果图。时间因果图由信号流图引出,并由图解表示动态系统特性。时间因果图是一种有向图,它由节点、有向线段和标注组成,每一个节点表示系统的一个变量,有向线段表示节点之间的关系。
时间因果图标注如表1所示。
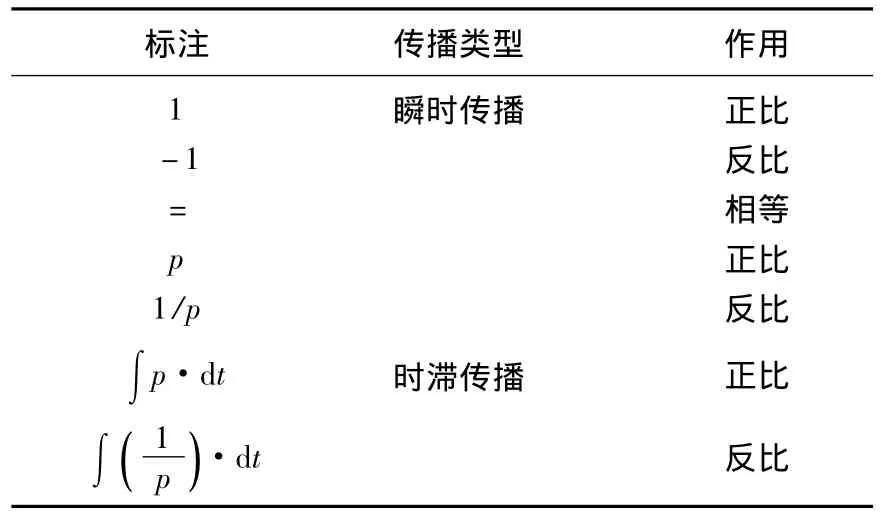
表1 时间因果图标注Tab.1 The label of TCG
在线性时不变系统中,p为常数,然而在时变线性系统中p不是常数,其根据时间与系统其他变量的值来影响v2与v1之间的关系。
时间因果图是一种有向图,则一个时间因果图可以表示为 <V,E>,即:

式中:V={ei,fi},i∈BG、E 的数量;E= < {e,标注}> ,e=(x,y),x、y∈V,标注 ={= ,1,-1,p,1/p,p∂t
3 故障诊断算例
3.1 双容水箱时间因果图
双容水箱液位控制系统结构如图2所示。
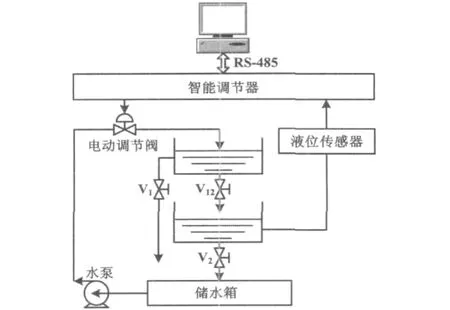
图2 系统结构图Fig.2 Structure of system
图2中,系统包括上下水箱、水泵以及V1、V12、V2三个出水阀。
根据键合图理论,水箱对应键合图中的容性元件C1、C2,阀门对应于阻性元件 R1、R12和 R2,水泵一般采用流源Sf表示。
双容水箱系统的键合图模型如图3所示。
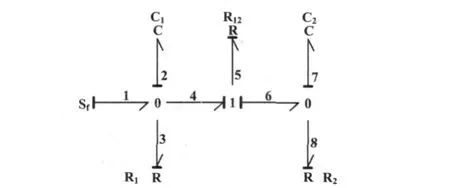
图3 双容水箱的键合图模型Fig.3 The BG model of dual-volume water tank
双容水箱系统的因果类型模式表如表2所示,进而建立系统的时间因果图如图4所示。
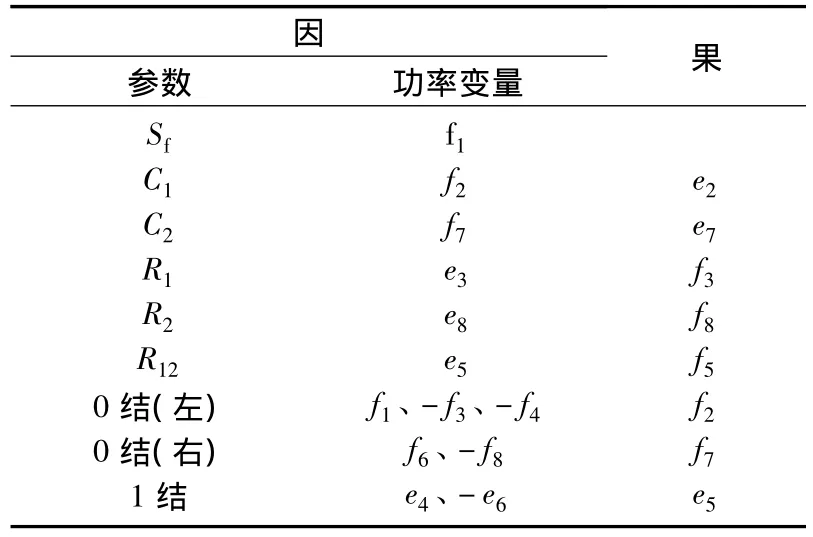
表2 因果类型模式表Tab.2 Causality type mode
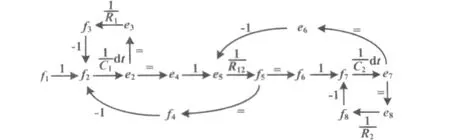
图4 系统时间因果图Fig.4 TCG of the system
3.2 双容水箱系统故障树的建立
当发现观测量偏离正常状态时,利用时间因果图向后推理,建立系统的故障树,从而生成假设故障集合。如在双容水箱系统中,假设故障现象为压力e7增大,则生成的系统故障树如图5所示。
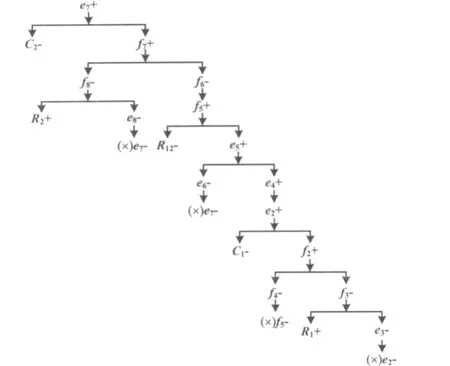
图5 系统故障树Fig.5 Fault tree of the system
根据图5所示的系统故障树,可生成故障集合:{C2-、R2+、R12-、C1-、R1+}。假设故障的前向推理图如图6所示。
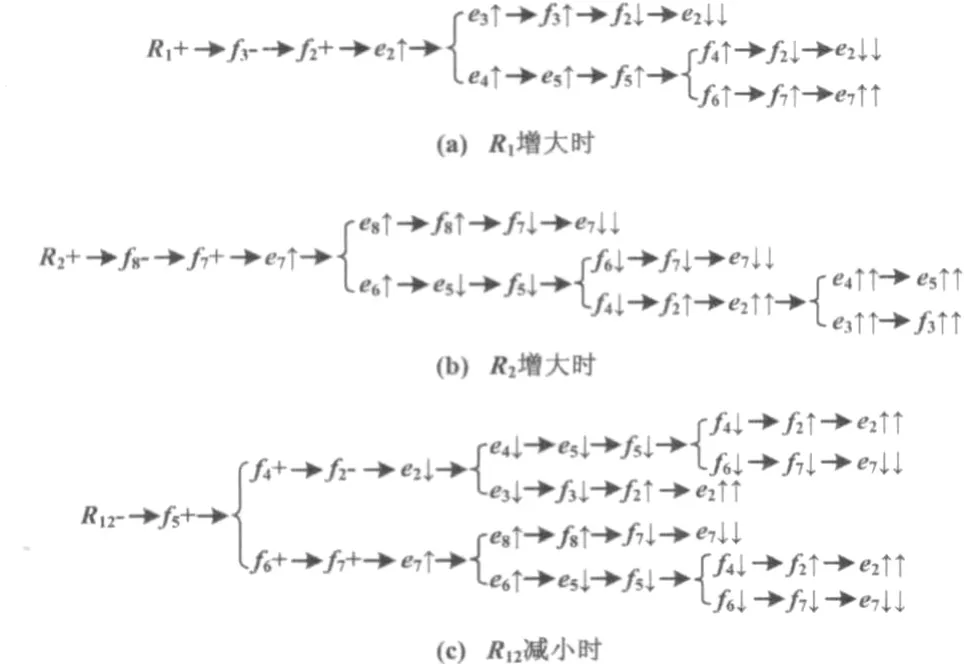
图6 假设故障的前向推理图Fig.6 The forward illative map of hypothetic fault
由系统故障树推理出的结果是一个假设故障集合,表示所有可能发生此故障的原因。要想得出真正引起故障的原因,还须根据时间因果图,对假设故障集合中的每个故障定性地预测引起系统参量变化的原因及趋势,生成各种假设故障下系统的参数变化趋势。本文只考虑管道的故障,所以对故障集合中的R2+、R12-、R1+分别进行推理预测。
对假设故障中的每个可能故障原因(R2+,R12-,R1+)进行前向推理,定性预测系统在此故障情况下的将来状态,具体表现为有关参量的变化趋势。在各故障情况下,系统各参量 e7、e2、f2、f3、f7的变化趋势如表3所示。
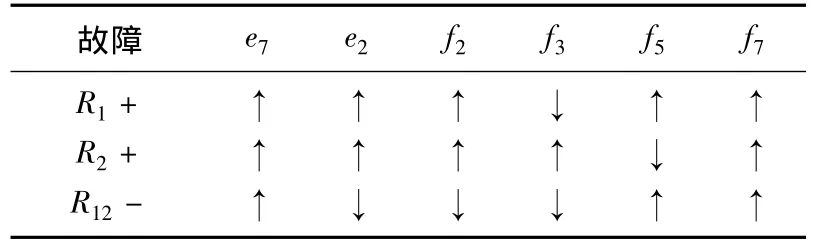
表3 参量的变化趋势Tab.3 Varying trend of the variants
3.3 故障诊断
根据被控对象的键合图模型,在20-sim仿真软件中建立双容水箱液位控制系统的仿真模型。本文假设故障现象为e7增大。
无故障时仿真结果如图7所示。其中阀V1的流量为f3。
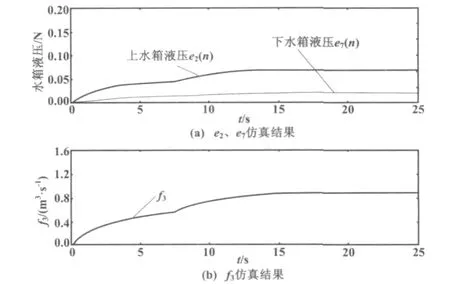
图7 无故障时仿真结果Fig.7 Simulation results when there is no fault
采用斜坡信号和定值信号相加设置管道堵塞的缓变故障,键合图中用可调制阻性元件MR来实现阻性元件参数的可变性。
故障时间均设置在t=10 s时开始,当不同故障的发生引起e7增大时,模型仿真得到参数e7、e2、f3的变化曲线如图8所示。
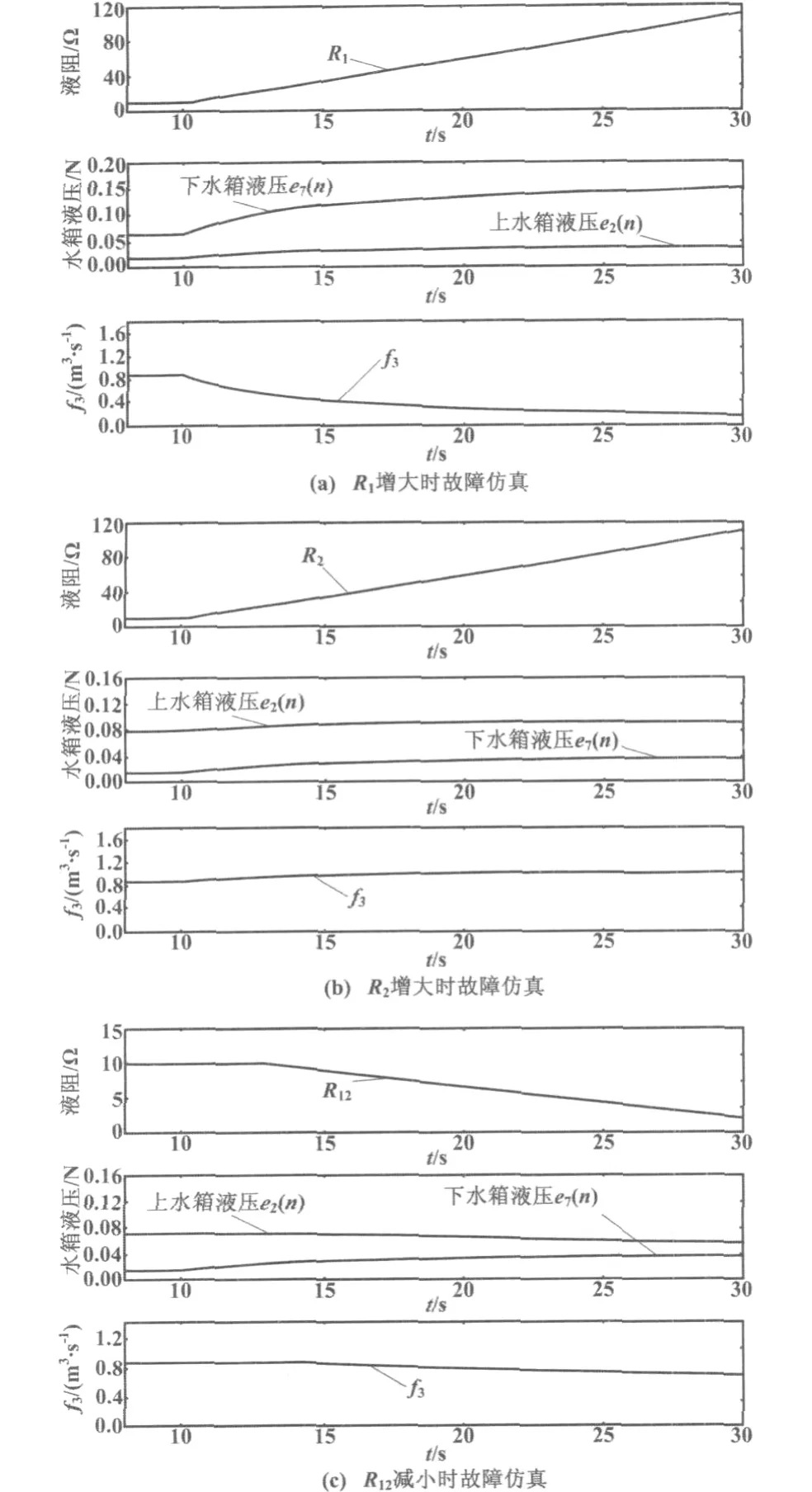
图8 不同故障下的仿真结果Fig.8 Simulation results under different fault
将图8在不同故障下的仿真结果与表2进行对比,可以得到故障诊断结果如表4所示。结果表明,这与仿真中所假定的故障也是一致的。
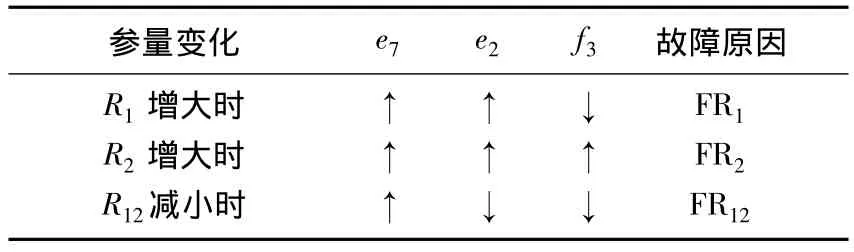
表4 故障诊断结果Tab.4 Results of fault diagnosis
4 结束语
本文提出采用键合图模型建立系统故障树来进行故障诊断的方法,以双容水箱系统为对象,较全面地分析了该方法的实现步骤并进行了仿真。实际系统的故障推理与仿真结果的对比证明了此诊断方法的正确性。与其他故障诊断方法相比,该方法具有计算量少和对模型精确度要求低等显著优点[7]。
[1]周东华,孙优贤.控制系统的故障检测与诊断技术[M].北京:清华大学出版社,1994:8-30.
[2]王中双.键合图理论及其在系统动力学中的应用[M].哈尔滨:哈尔滨工程大学出版社,2007:1-35.
[3]杨昌昊,胡小建,竺长安.从故障树到故障贝叶斯网映射的故障诊断方法[J].仪器仪表学报,2009,30(7):1481 -1482.
[4]杨锡运,徐大平.键合图在火电厂热工对象建模中的应用[J].控制工程,2005,30(7):18 -24.
[5]邵延峰,薛红军.故障树分析法在系统故障诊断中的应用[J].中国制造业信息化,2007(1):72-74.
[6]欧阳丹彤,欧阳继红,刘大有.基于模型诊断的研究与进展[J].吉林大学学报:自然科学版,2001,28(4):30-35.
[7]赵剑,欧阳丹彤.MBD中通过混合键合图对混合系统建模[J].长春大学学报:自然科学版,2007,24(10):19-23.
