轴向主动磁轴承的模糊自抗扰控制
2011-07-25卢立户刘海娟诸德宏徐荣
卢立户,刘海娟,诸德宏,徐荣
( 1. 江苏大学 电气信息工程学院,江苏 镇江 212013;2. 西门子变压器有限公司,济南 250022 )
磁悬浮轴承[1-2](简称磁轴承)在航空航天、机械加工以及医疗等领域具有广泛的应用前景[3-4],控制系统的好坏直接影响到整个系统的性能,常用的控制方法有:变参数PID控制、模糊控制[5]、神经网络控制[6]、自适应控制和变结构控制[7]以及各种方法的综合等。
自抗扰控制器(ADRC)是一种改进型非线性PID控制器,通过安排过渡过程解决了“快速性和超调之间的矛盾”;非线性扩张状态观测器的使用实现了不用积分反馈也能达到“无静差”,避免了积分反馈的副作用;该控制器在对象参数发生变化或遇到不确定性扰动时能得到很好的控制效果,因此,具有很强的适应性、鲁棒性和抗干扰性[8]。根据自抗扰控制器的基本原理,针对轴向主动磁轴承设计了自抗扰控制系统,并对该系统进行了阶跃响应、抗干扰性和鲁棒性试验,而且还引入了模糊逻辑控制对ADRC非线性模块进行参数整定。
1 轴向主动磁轴承的结构与数学模型
1.1 结构及工作原理
轴向主动磁轴承的基本结构如图1所示,由轴向控制线圈、轴向定子和吸力盘等组成。定子铁芯采用硅钢片叠压而成,转子(吸力盘)是一质量为m的整体钢盘,置于2个轴向定子之间。图1中带箭头的虚线表示轴向控制线圈通电后产生的控制磁通,在轴向定子、轴向气隙和转子之间构成回路。当转子处于轴向平衡位置,线圈通入的电流大小相等,轴向控制线圈在轴向两端气隙处所产生的磁通是相等的。因此,转子受到轴向的磁吸力为零。假设当转子受到外界扰动力向右运动时,传感器检测出转子偏离平衡位置的位移,通过控制作用使左侧控制线圈中电流增加,右边控制线圈中电流减小,则转子受到向左的悬浮力增加,而转子受到向右的悬浮力减小,其合力与扰动力方向相反,从而把转子“拉回”到平衡位置。如转子受到向左的外力扰动,可以通过控制作用得到类似结果。所以不论转子受到向左或向右的扰动,通过控制器调节控制电流,均可使转子始终保持在平衡位置。

1—控制磁通;2—轴向控制线圈;3—轴向定子;4—转轴;5—吸力盘
1.2 数学模型
由文献[9]可知,轴向主动磁轴承的悬浮力方程为
(1)
式中:F为磁轴承转子所受的轴向磁吸力;x为轴向位移偏移量;i为控制电流;i0为偏磁电流;μ0为空气磁导率;δ0为气隙长度;N为控制线圈匝数;Sa为轴向磁极面积。
对(1)式进行线性处理,在平衡位置附近(x≪δ0,ix≪i0)进行Taylor展开并略去高阶无穷小量可得
(2)
式中:kx为轴向位移刚度系数;ki为轴向电流刚度系数。在磁轴承的结构和工作点确定后,kx和ki为常数。
2 控制系统的设计
2.1 自抗扰控制器的结构及原理
自抗扰控制器由非线性跟踪-微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈(NLSEF)控制规律3部分组成,如图2所示。TD用来安排过渡过程,并给出各阶微分信号;扩张状态观测器(ESO)由对象输出来观测其各阶的导数和估计扰动;非线性状态误差反馈(NLSEF)利用TD和ESO的输出之差来形成控制量u0(t)。用这些误差的非线性组合和总扰动估计补偿量来生成对对象的控制量u(t)。

图2 自抗扰控制器的结构框图
2.2 控制器的设计
(1)安排过渡过程TD[8]
(3)

A=v1-ur+v2|v2|/2R。
(2)扩张状态观测器ESO[10]

(4)
(3)非线性状态误差反馈NLSEF[11]

(5)
式中:R,det1,det2,det3,bet1,bet2,bet3,a1,a2,a3,a4,a5,b,bt1,bt2为待定参数,都需经调整确定。由控制规律的表达式可知,系统控制规律与系统内部的参数无关,而只与系统的输出和给定输入有关。
2.3 模糊自抗扰控制系统的结构
图3所示为轴向磁轴承模糊自抗扰控制系统的结构框图,由二阶TD、非线性状态误差反馈NLSEF、三阶ESO和模糊控制器组成。因在实际应用中,非线性反馈参数β1和β2与PD控制器的2个参数Kp,Kd的整定十分相似,β1为比例系数,β2为微分系数。因此设计了一个模糊控制器,以e1和e2作为控制器的输入,利用模糊控制规则在线对自抗扰参数进行修改,以满足不同时刻的e1和e2对β1和β2自整定的要求。

图3 磁轴承闭环控制系统结构框图
2.4 自抗扰控制的参数整定
由于ADRC的3个组成部分TD,ESO和NLSEF是相互独立设计的,其参数可以独立进行整定。在参数整定过程中可以发现,TD的参数可以固定化;ESO的参数与扰动幅值成正比,扰动幅值越大则相应的参数也就越大[12];NLSEF参数的整定可以用PD中的P,D的模糊整定方法[13]。因此,运用模糊控制理论,以误差E和误差变化率EC作为输入,利用模糊控制规则在线对β1和β2参数进行修改,从而满足不同时刻的E和EC对β1和β2自整定的要求。
将系统误差E、误差变化率EC、输出U1和U2变化范围定义为模糊集上的论域:E,EC,U1,U2= -3, -2, -1, 0, 1, 2, 3,且其隶属度函数均采用灵敏度很强的三角函数,如图4所示。

图4 E, EC, U1, U2的隶属度函数
在该控制器中模糊控制子集为E,EC,U1,U2={NB, NM, NS, ZO, PS, PM, PB},针对β1和β2分别建立了模糊控制规则表,见表1、表2。
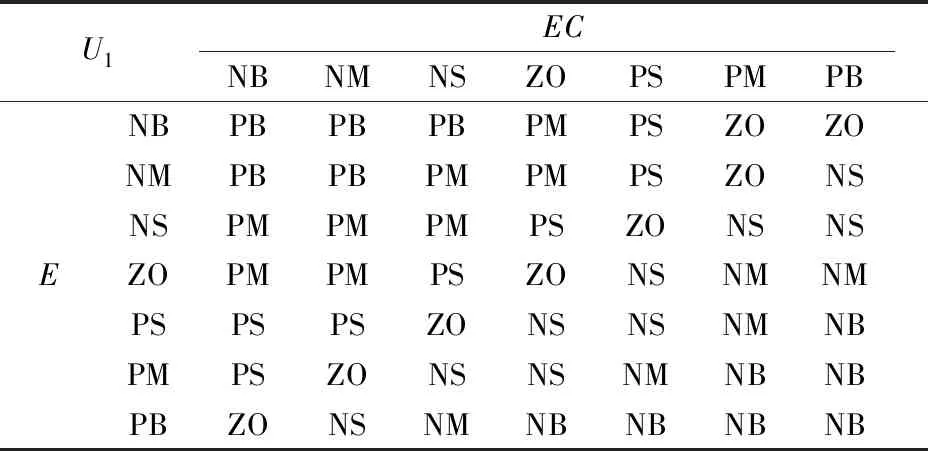
表1 参数β1的模糊控制规则表
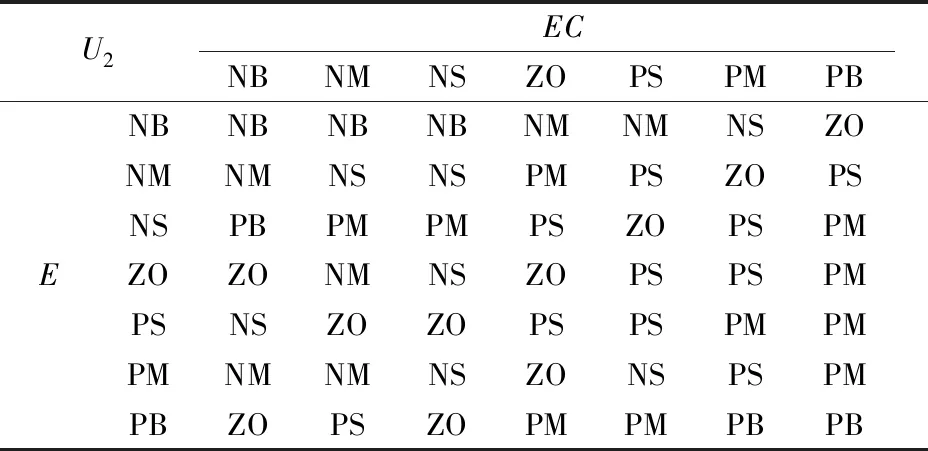
表2 参数β2的模糊控制规则表
3 控制系统的仿真试验及结果分析
文中所采用的轴向主动磁轴承仿真参数如下:控制线圈匝数为572匝,平衡气隙δ0为0.45 mm,轴向线圈偏磁电流i0为0.5 A,磁极面积为392 mm2,饱和磁感应强度Bs为0.8 T,转子质量m为1 kg,最大承载力为200 N,电流刚度系数Ki为-397.8 N/A,位移刚度系数Kx为441 947.1 N/mm。
给定ADRC的参数取值为:R=220, det1=0.01, det2=0.003, det3=0.003, bet1=5 000,bet2=600 000, bet3=500,α1=0.75,α2=0.5,α3=0.25,α4=0.5,α5=0.75,b=0.5。
利用Matlab软件的Simulink工具箱搭建磁轴承系统模型并进行仿真,其仿真框图如图5所示。

图5 轴向主动磁轴承模糊自抗扰控制系统的仿真框图
3.1 阶跃响应仿真试验
图6所示为系统在输入单位阶跃信号时的位移响应特性曲线,从中可以看出,系统在0.12 s后进入稳定状态,响应速度非常快,超调量很小,进入稳态的时间短,几乎没有静差,动、静态性能良好。

图6 单位阶跃响应位移曲线
3.2 抗干扰性仿真试验
ADRC利用ESO所产生的信号z3(t)对总扰动(包括系统模型摄动和外扰动)进行估计,然后进行相应的反馈补偿,因而系统的抗扰动能力依赖于z3(t)对系统总扰动估计的精确度。
假设系统受到了幅值为30 N按锯齿波变化的扰动,图7给出了z3(t)对扰动力的估计曲线。由图可知z3(t)能够较准确地估计出系统受到的扰动力。

图7 z3对扰动力的估计曲线
图8所示为转子在平衡位置空载,系统只受到幅值为30 N按锯齿波变化的扰动时转子的响应曲线。从仿真结果看出系统受到外界扰动时转子只有极其微小的偏移量,说明系统控制性能良好,抗干扰性能比较强。

图8 受干扰时的位移曲线
3.3 鲁棒性仿真试验
在系统参数电流刚度系数Ki比较理想的情况下,将其减小30%时,输入单位阶跃信号,则系统的响应曲线如图9所示。对照图9和图6可知,如果磁轴承的电流刚度减小30%,控制系统的阶跃响应变化很小,从而验证了该控制系统具有比较强的鲁棒性,控制性能良好。

图9 Ki变化后的阶跃响应位移曲线
4 结束语
将模糊和自抗扰控制理论用于轴向主动磁轴承的控制中,在软件Matlab的 Simulink上搭建了模糊自抗扰控制系统的模型并对其进行了仿真研究。仿真试验表明:所设计的轴向主动磁轴承模糊自抗扰控制系统具有响应速度快、超调量小、精度高、抗干扰能力强和鲁棒性好等特点。
