基于变论域模糊控制的温室环境控制系统的设计*
2011-07-25何海燕薛河儒
何海燕,薛河儒
(内蒙古农业大学 计算机与信息工程学院,内蒙古 呼和浩特010018)
随着农业的不断发展,设施农业将成为未来农业的主旋律,因此发展温室种植成为提高经济效益、改善农业生态环境的一种有效途径。温室生产以达到调节产期、促进生长发育、提高质量和产量为目的。而温室设施的关键是温室环境控制,调节温室环境的温度、湿度、CO2浓度、光照等环境因子,使植物一直在最佳的生长环境下成长。
温室环境控制即实现温室的智能化管理,根据温室环境控制系统把当前的温室环境参数自动调节到植物最佳的生长环境。温室环境系统是一个多变量、大惯性的非线性系统,且有交连、时延等现象,很难对这类系统建立精确的数学模型。应用基于BP神经网络的变论域模糊控制方法对温室环境进行控制,则不需要建立精确的数学模型,解决了模糊控制中初始论域选择不当对温室控制的影响,也无需过多的专业知识。基于BP神经网络的变论域模糊控制方法不仅使温室环境控制更加精确,而且控制系统的建立也变得更加容易。
1 控制系统的结构及原理
1.1 控制系统的结构
系统结构如图1所示,传感器采集到室内和室外的温度,经过变论域模糊控制系统得出控制决策,并通过被控对象进行加热和开窗操作。变论域模糊控制系统采用基于BP神经网络的变论域模糊控制算法。

图1 系统结构框图
1.2 基本原理
1.2.1 变论域模糊控制
在温室环境控制过程中,由于温室环境是一个多变量的非线性系统,难以建立数学模型,虽然使用模糊控制不需要建立精确的数学模型,但初始论域的选择却对整个控制的精度有很大的影响。因此,变论域模糊控制能解决初始论域选择的问题[1]。
变论域是在论域上模糊划分不变的前提下,论域随着误差的变小而收缩,亦随着误差的变大而膨胀,通过论域的变换,将专家总结出来的初始规则库变成更加有效的新规则库。表面上看,规则的个数没有变化,但是由于论域的收缩而使得规则局部加细,相当于增加规则数,从而提高了控制精度[2]。论域的变化情况如图2所示。

1.2.2 BP神经网络
BP神经网络即误差反向传播网络,是由输入层、隐含层、输出层三部分组成的多层前馈网络。当给定一个输入时,从输入层到输出层的传递是一个前向传播过程,如果实际输出与期望输出存在一定的误差,则转入误差反向传播的阶段,并根据各层误差的大小来调节各层的权值,如此不断迭代修正各层的权值直到收敛,结构如图 3所示[3]。
2 系统的总体设计
2.1 系统的原理
基于BP神经网络的变论域模糊控制由模糊控制技术与BP神经网络相结合构成,它兼有模糊推理的语言表达能力和BP神经网络的自学习能力。基于BP神经网络描述系统论域的伸缩变化,在系统控制过程中用BP模糊神经网络计算出当前系统的伸缩因子,同时根据当前系统的误差利用BP神经网络的学习能力不断地对伸缩因子的模糊划分进行优化。基于BP神经网络的变论域模糊控制系统的原理如图4所示。

2.2 系统参数的设计
2.2.1 变论域模糊控制的设计
(1)基本论域的选择
根据温室环境控制系统,设误差基本论域取[-4,+4],误差变化率的基本论域取[-2,+2],输出的基本论域取[-1,1]。输出的控制量U用4个模糊状态来描述,即PB(正大)、PM(正中)、PS(正小)、ZO(零)即将加热管道的能量输入分为 4 个等级,分别为[0,1.6×105,3.2×105,4.8×105]W。
(2)模糊规则的制定
选取控制量的变化的原则是:当误差大或较大时,选择控制量以尽快消除误差为主;而当误差较小时,选择控制量要注意防止超调,以保证系统的稳定性为主要出发点。本系统模糊控制规则表如表1所示。

表1 模糊控制规则表
(3)隶属度函数的选择
模糊子集隶属函数的形状有三角形、梯形或是正态分布等。由于变论域模糊控制对隶属度函数的选择要求不高,这里选择三角形隶属函数:由3个参数(a,b,c)来表示:

(4)去模糊化
从模糊推理而得到的控制输出是一个模糊集,它反映了控制语言的模糊性,但实际中对于一个物理对象的控制是唯一确定的。去模糊化的任务是将推理得到的模糊输出转换成非模糊值(清晰值),以便形成精确的控制量去控制被控过程。去模糊化的方法有多种,例如最大隶属度法、重心法(加权平均法)等。采用重心法反模糊控制的计算公式为:

其中,U*为量化清晰值,xi为模糊论域上的离散量,u(xi)为隶属函数。
2.2.2 BP神经网络的设计
(1)BP神经网络结构的设计
BP网络的输入、输出层节点数完全根据使用者的要求来设计。因此,BP神经网络采用二输入三输出的三层结构,即输入节点数为2,输出节点数为3。
(2)隐藏层节点的确定
BP神经网络最主要的特性是具有非线性映射功能。隐含层节点数的选择是一个十分复杂的问题,没有很好的解析式来表示。它与求解问题的要求及输入、输出节点数的多少都有直接的关系。综合上述各种因素,确定隐藏层的节点数为7。
(3)学习速率选择
学习速率的确定是一个非常关键的工作,它直接关系到学习的速度及学习成功与否。学习速率决定每一次训练中所产生的权值变化量。大的学习速率可能导致系统不稳定,但小的学习速率将会导致训练较长,收敛速度慢。所以一般情况下学习速率的取值范围在0.01~0.8之间。本文中BP神经网络的学习速率η为0.4。
(4)动量因子的选取
在BP算法中,为加快收敛速率和防止振荡,通常都会引入动量因子,以将上次权值的调节量进入当前权值的修改过程,平滑学习路径。通常动量因子取值的范围为0~1。本文中动量因子选为-0.1。
(5)期望误差的选取

3 系统的流程
温室系统是一个大滞后、非线性的系统 ,需要不断地对温室系统的调控参数进行检测,调整各个执行设备的开启时间,从而使得温室总是保持在作物生长的最佳环境状态。图5为系统的流程图[5]。
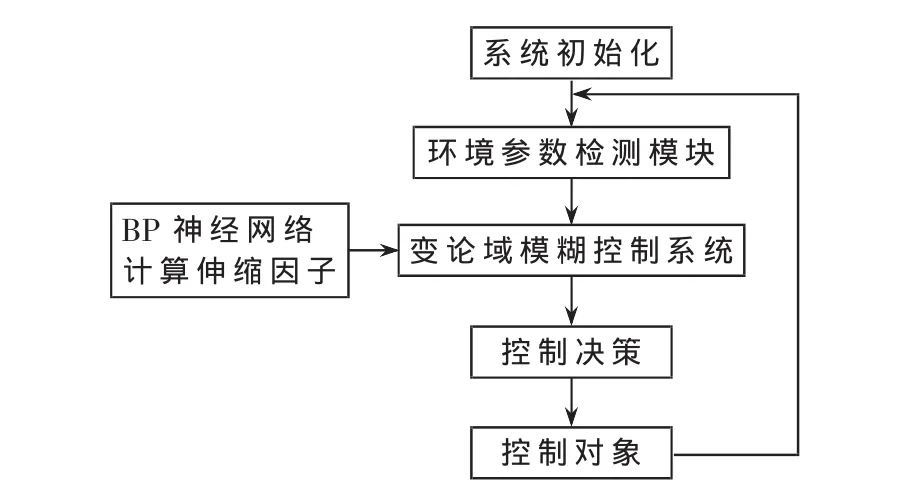
图5 系统的流程图
本文详细介绍了一种基于BP神经网络的变论域模糊控制的温室环境控制系统的设计。系统以模糊控制为基本控制方法,用BP神经网络改进了模糊控制的论域,从而提高温室环境控制的精度。适合温室环境控制的多输入、多输出和多变量的复杂现象。
[1]李良峰.变论域模糊控制算法的研究[D].成都:电子科技大学,2008:.
[2]李洪兴.变论域自适应模糊控制器[J].中国科学,1999,29(l):32-42.
[3]张洪波,陈平,刘学,等.基于神经网络的专家系统在温室控制中的应用[J].成都信息工程学院学报,2010,25(3):260-263.
[4]刘增良,刘有才.模糊逻辑与神经网卡(第1版)[M].北京:北京航空航天大学出版社,1996:116-118.
[5]陶然,王树文,薛圆满,等.智能化温室环境控制系统的研究[J].农机化研究,2003(2):53-54.