基于N-K模型的空中交通安全耦合风险分析
2011-07-24刘堂卿
罗 帆,刘堂卿
(武汉理工大学管理学院,湖北武汉430070)
随着我国航空运输业的持续高速发展,我国民航空管系统正处于成长的战略机遇期、快速发展期和管理转型期,空中交通安全保障能力的瓶颈效应日益凸显出来。空管风险因素是空管安全风险问题的原因和始端,通常一个风险因素不会造成大的系统故障,当多个风险因素相互作用,叠加放大后就可能造成系统故障。因此,对风险因素的耦合进行分析和研究,是防止空管不安全事件发生的关键步骤,也是最终控制安全事故,提高风险管理水平的关键所在。
国外学者FELICI通过对空中交通管理的安全进行动态分析,并结合案例,提出了动态安全分析模型框架,指出系统的安全分析要考虑技术、组织和成本因素[1]。SVEN和ROLAND构建了基于事故的程序模型,把扰乱作用障碍分析法引入空管风险分析,利用DEB方法分析如何在一个复杂的系统中识别空中交通管制的风险[2]。PETER介绍了欧洲空管对风险评估和减弱的要求,即要求用系统的、结构化的方法来评估和减弱空管风险,并研究了如何运用预测和监测技术来实现这些功能[3]。国内对空管的安全风险管理研究相对较少,袁乐平等结合空管运行的实际情况建立了危险严重程度评价指标体系,并利用模糊评价的相关理论,进行危险发生严重程度的评估[4]。万健等对空管灾害诱因进行分析后,考虑理想状况与实际情况的差异,构建了空管监控指标体系[5]。罗帆等根据安全管理者的访谈记录,收集整理出影响空管安全的风险因素,并按照人员、设备、环境和管理4个方面进行分类、提炼、合并和综合,设计了风险评估指标体系并进行优化[6]。国外学者提出的安全风险系统管理的理论、模型和方法等都有一定的实践意义,值得国内民航系统参考和借鉴;国内学者大多从单因素风险的角度去评估风险和设计指标体系,而没有从风险因素耦合的角度去研究,导致风险评估指标体系不够完善,实践操作性不强。因此,防范空管安全的耦合风险研究,对于空管系统各个层面、各个细分机构的安全风险管理提供了参考和借鉴,具有重要的现实意义。
1 空管安全单因素风险
空中交通管理系统是一个复杂的动态系统,涉及到人、机、环、管4大子系统,在安全上存在着很多风险因素。根据系统工程理论,将空中交通安全的影响因素大致分为4类:人为因素、设备因素、环境因素和管理因素。
人为因素风险是指空管安全系统中区域管制、进近管制、塔台管制、报告室、航行情报、通信导航和航空气象服务等业务单位与安全相关的日常工作及人员的素质和能力所引起的风险,包括生理因素风险、心理因素风险和技术因素风险等[7-8]。
设备因素风险是指空管安全系统中与安全相关的空中交通服务和导航服务中的各种设备配置、完好性、利用率等所引起的风险,包括通信设备风险、监视设备风险、导航设备风险和照明设备风险等。
环境因素风险是指空管安全系统运行的内外环境,如航路空域环境、地理环境、气象环境、人文环境、通信环境和空管内部环境等所引起的风险,包括航路设计不合理、空中交通流量过大、高原山地异物干扰、飞行动物干扰、恶劣天气、非法活动干扰、电磁干扰和室内工作环境不适等。
管理因素风险是指空管安全系统中各机关和部门的安全指导思想、组织结构、规章制度建设、培训和安全文化等引发的风险,包括空域管理不当、规章制度不合理、工作程序不合理、决策失误、执行决策不力、排班不科学、管理制度落实不到位和人力资源管理不配套等风险。
2 空管安全耦合风险的含义及分类
2.1 空管安全风险耦合的含义
物理学中把两个或两个以上的体系或两种运动形式之间通过各种相互作用而彼此影响以致联合起来的现象称之为耦合。系统动力学认为世界上的万事万物不是孤立存在的,必须以系统部分的方式存在。自组织理论认为系统与系统之间存在着非线性的相互作用,系统与系统之间的相互作用是事物存在的普遍范式,这种范式称为耦合[9]。风险耦合指的是系统活动过程中一类个别风险的发生及其影响力依赖于其他风险的程度和影响其他风险发生及影响力的程度,这种风险间的依赖和影响关系称之为风险耦合。空管安全风险耦合是指空管安全活动过程中各种风险之间的依赖和影响关系。
2.2 空管安全耦合风险的类型
风险按不同的标准有不同的分类,而风险耦合的类型与风险的分类又有紧密的联系。由于空管安全风险耦合的存在,扩大了空管安全风险的范畴,在空管安全风险管理理论风险分类的基础上,空管安全耦合风险可分为以下3种类型:
(1)单因素耦合风险。单因素耦合风险是指影响空管安全的单个风险因素所属的风险因子之间的相互作用和影响所引发的风险。单因素耦合风险包括人为因素耦合风险、设备因素耦合风险、环境因素耦合风险和管理因素耦合风险,分别记为T11(a)、T12(b)、T13(c)和T14(d),耦合风险总值记为T1。
(2)双因素耦合风险。双因素耦合风险是指影响空管安全的两个风险因素之间的相互作用和影响所导致的风险。双因素耦合风险包括人-机因素耦合风险、人-环因素耦合风险、人-管因素耦合风险、机-环因素耦合风险、机-管因素耦合风险、环-管因素耦合风险,分别记为T21(a,b)、T22(a,c)、T23(a,d)、T24(b,c)、T25(b,d)和T26(c,d),耦合风险总值记为T2。
(3)多因素耦合风险。多因素耦合风险是指影响空管安全的3个及多个风险因素之间的相互作用和影响所导致的风险。多因素耦合风险包括人-机-环因素耦合风险、人-机-管因素耦合风险、人-环-管因素耦合风险、机-环-管因素耦合风险、人-机-环-管因素耦合风险。其中3因素耦合风险分别记为T31(a,b,c)、T32(a,b,d)、T33(a,c,d)和T34(b,c,d),风险总值为T3;4因素耦合风险记为T41(a,b,c,d),风险值为T4。
3 基于N-K模型的风险耦合分析
N-K模型[10〛是一个解决复杂问题的通用模型,包括两个参数:N为组成整体组件的数目;K为网络中相互依赖关系的数目,它是适应度景观图的主要决定因素,适应度的值依赖于K。如果系统中有N类组元,每类组元各可取n种不同的情况,则所有可能的组合方式就有nN种。当系统组元按一定的方式组合起来时,就会形成网络。K最小为0,最大为N-1。由于影响空管安全的所有风险因素不可能在同一时刻突破所有的防御系统,进行耦合超出安全系统所能承受的最大阈值,而是部分风险因素在突破局部防御系统后,在耦合的过程中才逐步达到全局的最大耦合值,因此当它们找到局部耦合点之后,就会依据这一模式进行耦合活动,而不是再费精力和时间去寻找所有风险因素的耦合。局部耦合是在风险传导的过程中逐步显露出来的,不能与局部耦合风险再次耦合的风险就会趋于消失,只有与局部耦合风险进行耦合的风险才能不断导致耦合风险进一步扩大,这就导致了空管安全风险耦合的专门化。通过对适应度的考察就可对不同组元的合作效果、系统的复杂现状进行考察。这一模型为复杂系统的研究提供了一个通用的分析工具。下面就利用N-K模型来研究空管安全风险耦合的复杂性。一个直接评价不同的人为因素风险、设备因素风险、环境因素风险、管理因素风险相互耦合,形成新的风险状态的方法是计算四者之间的交互信息T[11],也就是说如果运用某一组合方式进行耦合的次数越多,则说明这种耦合方式发生的概率越大;某一组合方式进行耦合的值越大,则说明这种耦合风险越大,发生不安全事件的可能性就越大。N-K模型起源于信息理论,原本是用来测度信息的传输量的。交互信息的计算公式为:
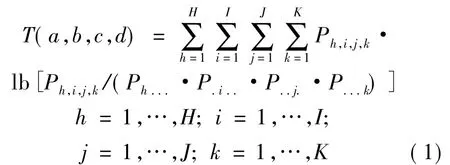
Ph,i,j,k为人在第h种状态、设备在第i种状态、环境在第j种状态、管理在第k种状态下耦合发生的概率,计算所得的T值越高,说明空中交通安全风险越大。T是空中交通安全风险的总的状况的数量化评估。
由于空中交通安全风险大多是发生在局部的,而局部的耦合可以是由3个风险因素发生耦合的不同情况,例如人为因素风险、环境因素风险和管理因素风险耦合后导致不安全事件,此时与设备因素风险关系不大时,就发生了局部风险耦合的情况。因此可以通过计算发生在三者之间的信息交互来考察局部耦合的风险情况。三者之间的风险耦合计算公式为:

同理,两者之间的风险耦合计算公式为:

局部的耦合也可以是一个风险因素内部因子之间发生耦合的不同情况,因此,单因素风险耦合可以看作是双因素耦合的特例,单因素之间的风险耦合另作进一步深入的研究。
4 空管安全风险耦合实证分析
下面对空中交通安全人、机、环、管4大风险因素之间的耦合在N-K模型中的应用进行详细的说明。未发生的各种情况和发生的各种情况分别用0,1来代表,则有16种可能的风险耦合形式。根据民航局空中交通管理局2000—2009年民航空中交通事件报告整理的数据,10年间共发生空管不安全事件519起,风险耦合发生次数以及每一种耦合发生的频率如表1所示。
为了计算T值,先计算以下各项的值:
(1)单因素耦合不同情况下发生的概率为:

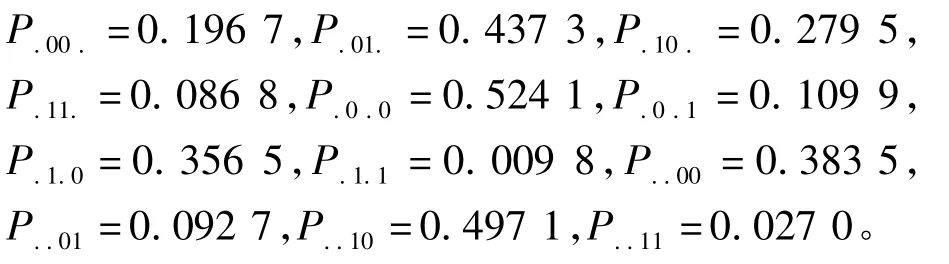
(2)双因素耦合不同情况下发生的概率为:
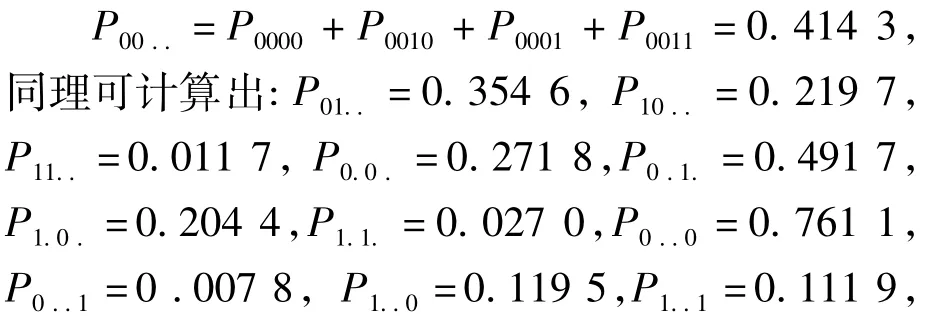

表1 2000—2009年风险耦合发生次数及频率
(3)多因素耦合不同情况下发生的概率为:

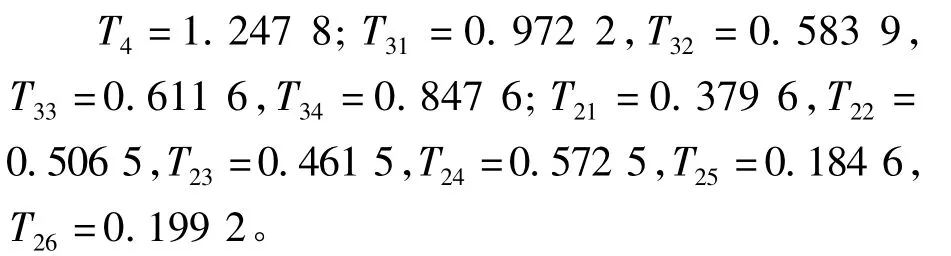
根据式(1)~式(11),可分别计算出下列各项耦合的T值:
5 结论
(1)随着耦合因素的增加,其风险也随之增大。从计算数据可以看出,3因素耦合的风险比两因素耦合造成的风险大,4因素耦合的风险比3因素耦合造成的风险大得多。
(2)在控制风险耦合的过程中,主观因素造成的风险比客观因素耦合造成的风险易于控制。因此,要充分发挥人的主观能动性,减少不安全事件的发生。从计算的结果看出,3因素耦合的风险中,人-机-环因素耦合风险、机-环-管因素耦合风险比人-环-管因素耦合风险、人-机-管因素耦合风险大得多;因此说明主观因素(人为因素和管理因素)完全耦合比不完全耦合风险要小,客观因素(环境因素和设备因素)完全耦合比不完全耦合风险要大。
(3)要加强对空域环境和现代空管设备的管理和研究,增强人与设备、环境界面的友好合作。两因素耦合的风险中,机-环因素耦合风险、人-环因素耦合风险较大,人-管因素耦合风险、人-机因素耦合风险其次,环-管因素耦合风险、机-管因素耦合风险较小。因此说明客观因素耦合风险大于主观因素耦合风险,同时也说明环境因素和设备因素之间存在着较大的耦合性,只要特定的环境因素和特定的设备因素相结合,发生风险的概率就较大。从2000—2009年发生的空管不安全事件中也可以看出这个规律。
(4)计算结果所得出的结论为空管安全管理工作提供了理论依据,即尽量避免多因素风险耦合,特别是4因素风险耦合,控制事故或事故症候的发生;尽量避免客观因素风险耦合,以减少空管不安全事件的发生。
[1]FELICIM.Modeling safety case evolution-examples from the air traffic management reliability[J].Engineering&System Safety,2004,86(3):269-284.
[2]SVEN T,ROLAND A.A method,DEB analysis,for proactive risk analysis applied to air traffic control[J].Safety Science,2004,42(7):657-673.
[3]PETER S.Risk assessment&mitigation in ATM[J].Safety Science,2006,44(7):629-655.
[4]袁乐平,孙瑞山,成媛.基于模糊评价和未确知数的空管安全风险评估[J].中国民航学院学报,2006,7(4):55-57.
[5]万健.空管灾害诱因分析及监测指标体系的构建[J].中国民航大学学报,2007,25(5):1-3.
[6]罗帆,贾贵娟,陈高明,等.空管安全风险评估指标体系的优化设计[J].中国安全科学学报,2009,19(8):115-120.
[7]丁松滨,石荣.空中交通管制人员风险评价的证据理论模型[J].系统仿真学报,2007,19(15):3368-3371.
[8]唐卫贞,付令.空中交通管制员操作可靠性模糊综合评价[J].武汉理工大学学报:信息与管理工程版,2010,32(1):114-117.
[9]李广城.工程地质学耦合理论初步研究[J].工程地质学报,2001,9(4):435-441.
[10]LEE F,OLAV S.Technology as a complex adaptive system:evidence from patent data[J].Research Policy,2001(30):1019-1039.
[11]郭晓林.产业共性技术创新体系及共享机制研究[D].武汉:华中科技大学图书馆,2006.
