永磁同步电动机在控制力矩陀螺中的应用
2011-07-23盛文杰余菊峰王建宽陈世琪张东宁
盛文杰,余菊峰,王建宽,陈世琪,张东宁
(中国电子科技集团公司第二十一研究所,上海200233)
0引 言
我国空间技术的发展,要求卫星具备的功能越来越多,同时对卫星指向精度和姿态稳定度也提出了越来越高的要求。因此研制高精度、高稳定度的卫星是当前空间技术的一个重要发展方向。卫星控制系统是卫星的一个关键分系统,纵观国内外卫星的发展,卫星控制系统通常采用的执行机构是控制力矩陀螺,它的转矩输出精度直接决定了卫星的姿态控制精度。而控制力矩陀螺的框架系统的角速率精度是影响其转矩输出精度的重要因素之一,因此要实现控制力矩陀螺输出转矩的高精度,必须实现其框架系统的高精度控制。
本文研制的永磁同步电动机及驱动主要应用于控制力矩陀螺系统的低速伺服分系统,为该分系统的主要驱动元件。为了保证该系统的高精度控制,在电机结构与电磁设计上进行了优化设计,使电机具有体积紧凑、齿槽转矩小、反电势正弦度高等特点;在控制中采用了高精度锁相环控制技术,使系统可以在低速情况下实现高精度控制。
1基本结构和原理
1.1中空盘式结构的永磁同步电动机基本结构
应控制力矩陀螺整机的要求,为充分利用空间、减小体积,采用中空盘式的结构设计方案,电机为分装式结构。具体的结构简图如图1所示。

图1 结构简图
电动机的结构紧凑,与普通的无刷电动机相比可以看出,采用高精度旋转变压器作为位置传感器代替传统的霍尔元器件,因此具有可靠性高、控制精度高等优点。
定子部分为带有绕组的定子铁心,转子部分由转子铁心和永磁体组成,转子采用径向磁路结构。
1.2 工作原理
该系统的位置传感器采用高精度的双通道旋转变压器,其转子与电机同轴安装,定子固定于电机定子上。当电机旋转时,旋转变压器输出两路正余弦信号,通过系统解调后可以得出定转子之间的角度差值,以此确定电机的运行位置,并通过检测旋转变压器的运行频率确定电机的运行转速。控制单元接收这些指令后控制驱动单元的开关元器件工作,使电机相电流的矢量合成与电机的磁极正交,以实现电机的矢量控制。驱动控制的原理框图如图2所示。

图2 系统驱动控制原理框图
2主要研究内容及特点
2.1低脉动永磁同步电动机极槽配合设计及仿真
针对此系统的低速高稳速精度等要求,设计的电动机采用低速大力矩的直驱永磁同步电动机。为了减小电机齿槽转矩对系统高精度运行时的影响,该电动机采用了39槽12极分数槽绕组结构形式,针对样机的特殊结构形式我们将39槽按星形电势图进行划分,保证电机的三相绕组的平衡。在这里所述的情况(Z=39、p=6、m=3),有3个绕组星形循环图,两对极下有13个元件,星形电势图如图3所示。由于每个星形图中的元件数是13,不是3的倍数,因此不可能构成完全对称的三相绕组。这种不对称表现在两方面:1)幅值不等;2)三相间空间夹角不是严格的120°电角度。由于整个绕组有三个重复星形图,因此可以通过特殊设计将多出的一个元件均匀布置在三个循环里,绕组展开图如图4所示。

图3 绕组星形电势图
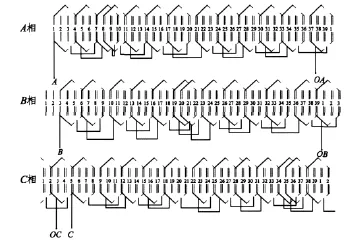
图4 绕组展开图
同时通过与Maxwell 2D软件相结合进行有限元优化仿真设计,在保证输出转矩的条件下,降低电动机的齿槽力矩,使电动机运行平稳,对系统的高精度运行影响最小。电动机的齿槽转矩仿真波形如图5所示,反电势波形如图6所示。


由图5可以看出,电机齿槽转矩只有0.013 5 N·m,说明磁路设计和极槽配合是有效的。
从图6可以看出,电机的反电势波形正弦性较好,对系统进行正弦电流控制非常有利。
该电动机设计体现了体积紧凑、精度高和可靠性高的特点。针对其负载是控制力矩陀螺低速框架,为了实现高控制精度的要求,采用特殊形式的分数槽绕组,降低电机的齿槽转矩,保证电机在低速运行时的稳定性。
2.2高精度调速的锁相控制技术
为实现高稳态精度的稳速控制,文中采用锁相控制技术实现电机的低速稳速控制。由于锁相环是将相位作为控制信号,相位是转速的积分,对于转速阶跃,即使稳态相位存在误差,对于速度而言是无差的。当速度反馈信号和速度参考信号锁定时,电机的平均速度误差将为零,只存在很小的瞬时高频抖动,意味着很高的稳态精度。

图7 锁相稳速控制结构
图7为锁相方式的稳速控制器结构图,它包括:鉴相器(PD)、环路滤波器(LF)、由控制算法与驱动电路加永磁同步电动机以及位置检测器件组成的压控振荡器(VCO)三部分。其工作原理如下:鉴相器将参考信号与反馈信号的相位进行比较,产生与相位误差相对应的电压信号ud,输送给环路滤波器;环路滤波器的作用是滤除ud中的高频成分,改善环路性能,并将滤波后的电压信号uf输送给压控振荡器;驱动器采用相应的控制算法接受uf指令并使电机输出转速向参考转速接近,直至消除偏差而锁定。
3应用结果
本文以锁相环技术作为系统速度控制的核心,设计了基于SVPWM的交流永磁同步电动机变频调速控制的电动机及驱动器,并将该电机及驱动器与控制力矩陀螺低速伺服框架联调进行了测试。系统中电动机额定转速为0.01°/s、输入电压为 28 V(DC)、调速范围为0.01°/s~5°/s。经过反复调整各项参数后达到:控制电机陀螺框架转速带宽达到10 Hz左右,在各个转速点的瞬态转速控制精度都在0.01量级以下,平均转速精度则稳定在0.004左右。
4结 语
本文针对卫星姿态控制用控制电机陀螺低速伺服框架的运行场合,以分数槽绕组永磁同步电动机作为驱动元件,采用独特的绕组极槽配合设计技术使电动机的齿槽转矩明显降低,提高系统稳定运行精度;同时解决该控制方式下电动机的中空盘式结构设计,永磁同步电动机体积更加紧凑,电动机的整体重量降低;采用锁相技术保证系统在低速运行情况下保持高稳速精度。研制的永磁同步电动机及控制器在已经应用于新一代控制电机陀螺系统,具有低速控制精度高、质量轻和功耗低等特点,其技术水平居国内领先地位,保证了控制电机陀螺的输出转矩精度,确保卫星姿态调节的整体精度。