太阳能跟踪系统的智能控制及系统设计
2011-07-23郑益文马立新
郑益文,马立新,鲁 奕,余 涛,肖 川
(上海理工大学,上海200093)
0引 言
近年来,太阳能作为一种理想的新能源,开发、利用太阳能是解决能源危机和环境问题最具独特优势的重要途径,成为人们研究和应用的热点。其中,光伏发电作为太阳能利用重要方面,拥有广阔应用前景[1]。由于太阳光具有间歇性以及日照强度和方向的不确定性,导致整个光伏发电系统呈非线性。目前太阳能跟踪系统主要采用平板固定式架构和PI、PID等控制方法,其架构单一,控制系统简单,跟踪控制效果差,发电效率较低,太阳能利用率低。
因此本文以Altera CycloneII 2C70 FPGA为开发平台,根据最大功率点跟踪(以下简称MPPT)原理和模糊控制原理[2],提出了一种新的太阳能跟踪方式,研究设计了一种追日性能良好、智能型、双轴跟踪的太阳能追踪系统,解决了系统非线性带来的控制困难等问题,能够准确跟踪太阳,极大地提高了太阳能利用率。本系统也是未来太阳能控制系统的一种发展方向,具有广阔的应用前景和现实意义。
1光伏发电和MPPT的概念、原理及特性
1.1光伏发电的概念、基本原理及特性
太阳能发电是指无需通过热转换过程直接将太阳光能转化成电能的发电方式,包括光伏发电、光化学发电、光感应发电和光生物发电。光伏发电是利用太阳能电池这种半导体电子器件有效地吸收太阳光辐射能,并将其转化为电能,是当今太阳能发电的主流方式。
太阳能光伏发电基本原理为:利用太阳能电池的光生伏打效应,光被晶体硅吸收后,在PN结区域中产生一对正、负电荷,正、负电荷被分离,产生一个外电流场,电流从晶体硅片电池的底端经过负载流至电池的负端,将太阳光辐射能直接转化成电能。一套基本的光伏发电系统一般由太阳能电池板、太阳能控制器、逆变器和蓄电池(组)构成。光伏发电的等效模型如图1所示。

图1 光伏发电的等效模型
图1中,IS为与光照强度成正比的光电流;Id为二极管反向饱和电流;I为负载电流;Ra为PN结等效电阻,Rb为太阳能电池串联等效电阻;R为负载电阻。
光伏发电系统的输出功率特性如下:

式中:Id为二极管反向饱和电流;q为电子电荷;K为玻尔兹曼常数;T为绝对温度;A为PN结理想因子。
1.2 MPPT的概念、基本原理及特性
MPPT控制即最大功率点跟踪控制[3],能够实时侦测太阳能电池板的发电电压,并追踪最高电压电流值,使电池板具有最高的发电量。由于电池板的输出功率受外部环境影响,因此,光伏发电系统普遍采用MPPT电路和相应的控制方法提高对光伏器件的利用效果。如果太阳能电池板的结温不变,其功率和日光强度的特性曲线如图2所示,当太阳能电池板接受的日光强度为Umax时,达到最大功率点Pmax。

图2 太阳能电池板功率和日光强度的特性曲线
2基于MPPT的模糊控制器设计
2.1基于MPPT控制思想的太阳能跟踪方式
由于太阳能电池板的发电量与太阳光入射角θ有关,即电池板在某时刻某温度下的最大输出功率与θ有关,当光线与电池板平面垂直时(θ=90°),其发电量最大,改变入射角θ,发电量明显下降。因此,可以通过控制入射角θ的大小,控制电池板的最大功率输出Pmax。入射角θ与电池板最大功率点Pmax的关系曲线如图3所示。

图3 入射角θ与最大功率Pmax的关系曲线
本系统要求太阳能电池板能对太阳做双轴跟踪[4],在水平方向上进行 360°旋转跟踪,垂直方向上进行180°俯仰角调节,以准确跟踪太阳所在方位。因此,系统采用四个光电传感器追踪太阳光,负责侦测东西南北四个方向的光源强度,各方向上均有一个光敏电阻,以45°角朝向光源处,并于该方向设置挡板用以隔离其他方向的光线,以达到快速判别太阳位置的广角式搜索。四个传感器分为两组,东西方向为一组,南北方向为一组,以东西方向为例:设uE为东向传感器的电压信号,uW为西向传感器的电压信号,△u为两个光电传感器输出的电压差信号,△u=uE-uW。当两个传感器接收到的光照强度不一致时,东西向传感器会输出两个不同的电压信号,也就是uE≠uW,此时△u越大,θ越偏离90°。uE、uW经过电压型模数转换器(ADC0804)转换后,输送给FPGA进行模糊控制算法处理,它根据两个光电传感器输出的电压差信号△u,计算出步进电动机步数n,并且驱动步进电动机做相应调整。当东西方向传感器接受光照强度相同时,则△u为零,电机步数亦为零,此时θ=90°,即东西方向太阳光和电池板垂直,系统处于太阳能最佳接受状态。
东西方向太阳光与电池板的入射角θ和光电传感器输出电压差信号Δu构成一一对应关系,如图4所示。南北向传感器工作原理相同。本系统为了与后面设计模糊控制器的输入变量区分,这里把Δu记作e。
由于太阳光具有间歇性,日照强度和方向的不确定性,系统是非线性的,故利用模糊控制算法上的智能性、自适应性来对非线性的太阳能跟踪系统进行控制[5],弥补传统方法的缺点,实现对太阳的准确跟踪。

图4 入射角θ和电压差信号Δu关系曲线
2.2模糊控制器的设计
本系统采用模糊控制理论作为步进电动机驱动的控制基础,模糊控制算法主要是设计一个模糊逻辑控制器[6],结构如图5所示。

图5 模糊逻辑控制器结构
2.2.1 模糊化
由图5所示,在采样间隔K时,设变量e(k)为东西向两个传感器信号差,△e(k)为信号差的变化率,则系统取e(k),△e(k)为模糊控制器的输入变量,步进电动机的运转步数n为输出变量。当e(k)为零时,表明电池板与太阳光垂直,已经工作在最大功率点上。每个变量都定义PB(正大)、PS(正小)、ZO(零)、NS(负小)、NB(负大)五个语言值,即 e(k),△e(k),n={NB,NS,ZE,PS,PB},每个语言值都采用了五个均匀分布的三角形隶属度函数,如图6所示。

图 6 e,Δe,n 的隶属度函数
2.2.2 模糊规则推理
在地球自转过程中,太阳光和电池板的角度关系也在不断变化,有步进电动机控制步数n和传感器电压差信号e特性曲线,如图7所示。
特性曲线中包含了步进电动机步数n随e(k)、△e(k)的四种变化过程:①当e(k)>0、△e(k)<0时,n由右侧靠近原点(Pmax),即电机向东前进;②当e(k)>0、△e(k) >0时,n由右侧远离原点(Pmax),即电机向西前进;③当e(k)<0、△e(k)>0时,n由左侧靠近原点(Pmax),即电机向西前进;④当 e(k)<0、△e(k)<0时,n从左侧远离 Pmax,即电机向东前进。
因此,当输入变量e(k)和△e(k)不同时,系统调整n的大小使输入变量e(k)始终趋于零。把所有的这些变化规则总结起来,就形成了模糊规则推理表,如表1所示。

图7 电机步数n和传感器电压差信号e特性曲线

表1 模糊规则推理表
2.2.3 反模糊化
本系统模糊逻辑控制器的仿真选择Mamdani型控制器,反模糊方法为重心法,其计算为:

式中:△n为第k次采样时模糊控制器输出的校正值;ri为第i条模糊规则推论的结果;u(ri)为第i条模糊规则的控制力度。
2.2.4 仿真结果
仿真结果如图8所示。通过模糊控制器控制传感器电压差信号e时,系统能够迅速调整步进电动机,并使e趋于零,即电池板与太阳垂直,跟踪到最大功率点上。
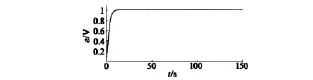
图8 仿真结果
3太阳能跟踪系统的系统设计
根据上文介绍的太阳能跟踪方式和智能控制方法,设计了系统控制流程图,如图9所示。
最后,系统基于Altera公司的 CycloneII 2C70 FPGA 开发板[7],采用 SOPC 系统开发技术[8],设计了系统智能跟踪控制器。系统采用GL5528光电传感器、863HB69-583步进电动机、ADC0804模数转换芯片、Altera CycloneII2C70FPGA等硬件搭建了太阳能跟踪控制系统,如图10所示。

图9 系统控制流程图

图10 太阳能跟踪控制系统
本系统采用300 W灯泡作为光源,通过改变光源的亮度来模拟太阳光的强弱,通过改变光源的位置来模拟太阳的转动,把光电传感器采集到的信号输入FPGA作相应的处理来控制步进电动机的转动。实验结果表明,步进电动机能够依据两侧的光照强弱作正、反转运动,当两侧的光强差值较大时,步进电动机转动的角度也较大;当两侧光强的差值较小时,电机转动的角度也较小,初步认定系统能够准确跟踪太阳,跟图8的仿真结果相符合。
4总 结
基于MPPT原理和步进电动机的特性,本文提出了n-θ太阳能跟踪方式,并采用模糊控制算法和FPGA设计了智能跟踪控制器,解决了系统非线性带来的控制困难等问题。这种基于FPGA的智能控制系统设计方式,不仅是本控制系统设计的创新,也是未来太阳能控制系统的一种发展方向,具有广阔的应用前景。
[1] 赵争鸣.太阳能光伏发电及其应用[M].北京:科学出版社,2005.
[2] Choi J S,Kim D Y,Park K T,et al.Design of Fuzzy Controller based on PC for Solar Tracking System,Smart Manufacturing Application[C]//ICSMA.2008:508-513
[3] Rodriguez C,Amaratunga G A J.Analytic Solution to the Photo-Voltaic Maximum Power Point Problem[J].IEEE Transactions on Circuit and Systems,2007,54(9):2054-2060.
[4] Lwin O,Kaythi H N.Microcontroller-based two-axis solar tracking system[C]//2nd International Conference on Computer Research and Development.2010:436-440.
[5] Tanvir Arafat Khan Md,Shahrear Tanzil S M,Rahman R,et al.Design and construction of an automatic solar tracking system[C]//The 6th International Conference on Electrical and Computer Engineering.2010:326-329.
[6] 石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008.
[7] 刘福奇.FPGA嵌入式项目开发实践[M].北京:电子工业出版社,2009.
[8] 李兰英.NiosⅡ嵌入式软核SOPC设计原理及应用[M].北京:北京航空航天大学出版社,2008.