基于OSEK间接NM实现的网络故障监测
2011-07-20陈晓霞陈文强潘之杰赵福全
陈晓霞,路 影,陈文强,潘之杰,赵福全
(浙江吉利汽车研究院有限公司,浙江 杭州 311228)
为满足日益庞大复杂的汽车电子控制软件的开发需要,1993年欧洲汽车工业界联合推出了OSEK/VDX(Open systems and the corresponding interfaces for automotive e1ectronics/Vehic1e distributed executive)标准[1]。该标准应用在模块和静态实时操作系统上,由主要的汽车制造商和供应商,研究机构以及软件开发商所发起。OSEK,是指德国的汽车电子类开放系统和对应接口标准;VDX,是指汽车分布式执行标准。OSEK/VDX标准从实时操作系统、软件接口、通信和网络管理等方面对汽车的电子控制软件开发平台作了较为全面的定义与规定。
在OSEK/VDX的合作领域内,NM (Network Management system,网络管理系统)提供标准化功能。它通过标准化的接口确保网络中的功能,其首要任务是确保ECU (E1ectronic Contro1 Units,电子控制单元)通信网络的安全性和可靠性。OSEK/VDX标准所提出的网络管理机制 (OSEK/VDX NM),主要是对网络节点的工作状态的实时监控。它提供了两种可选的监控机制:直接NM和间接NM。这两种监控机制相比,间接NM要比直接NM占用的资源少,而且能够提供精确的实时网络管理信息。目前间接NM的使用已越来越广泛,所以,本文就选用间接NM进行具体阐释。
1 OSEK/VDX间接NM
间接网络管理使用周期性的应用报文监控来决定连接到网络上的节点的状态,它不使用专用的网络管理报文。其节点状态分为发送者和接收者2种状态。其中发送者状态中又包含节点非静默和节点静默2种状态;接收者状态中包含节点在线和节点离线2种状态。另外还有2个扩展的节点状态,即扩展的发送者状态和扩展的接收者状态。
间接网络管理的配置将所有由NM决定的被监控节点的节点状态组成整体,它有目标配置和扩展配置。
为评估节点状态和网络状况,间接网络管理提供3种非专用的监控机制:①传输;②接收;③故障信号。OSEK间接网络管理的传输和接收监控基于两种可能的超时检测机制:所有报文被全局超时TOB监控;每条报文被自身专用的超时监控。
OSEK/VDX间接NM由NMOff(NM关闭)、 NMOn(NM开启)2个基本状态组成。NMOn状态包括NMBusS1eep(NM睡眠模式)、NMAwake(NM激活状态)两个子状态。NMAwake状态包括NMLimpHome(NM节点自身故障处理)、NMNorma1(NM节点的正常状态)、 NNWaitBusS1eep(NM节点准备进入BusS1eep模式的等待状态)3个子状态。
2 稳定逻辑环路通信的实现
远程车载定位设备的故障检测是无线通信技术、互联网技术和电子设备故障自检的结合。为实时监控车载网络中的节点,我们设计并实现了一种OSEK/VDX标准的间接网络管理的车载NM系统,并将其应用到控制器区域网络 (CAN总线)的车载网络中[2]。车载网关和网络节点由CAN总线连接,使用CAN2.0B协议通信。车载网关负责收集网络节点相应的配置信息,并通过IPV6的无线网络将其发送至远程故障诊断服务器。在服务器分析完故障信息,并且得出相应的处理信息后,再将处理信息反馈回车载网关,同时给网络节点发送相应的执行操作信息。车载网络是由总线将各个网络节点连接起来的总线型网络,而逻辑环路定义的通信序列是独立于该网络结构的。将惟一的标识符Receiver(接收者)分配给环路上的每个节点,同时,每个节点有惟一的一个Log_Successor(逻辑后继),逻辑上的第一个节点是逻辑上最后一个节点的逻辑后继。节点收到报文时,需根据逻辑后继的更改机制和跳行机制来调整这2个参数。
2.1 系统工作原理
本文所设计的车载NM系统,首先是由车载网关通过CAN总线收集各网络节点的故障信息,再通过IPV6无线网络上传至远程故障诊断器,并将得到的故障处理信息下发至有关节点,从而实现车载CAN网络与远程故障诊断服务器的信息交互[3]。作为检测中心程序的服务器端时,实时通信服务器程序打开一个服务侦听端口,侦听来自检测中心程序发送的连接请求,接受连接。连接建好后,它就可以接收检测中心程序发送的命令数据包。同时,将命令数据包转发给相应的通信车载设备。这个系统的实现,首先应该形成稳定的逻辑环路通信,而逻辑环路稳定的通信序列是按网络节点的标识符由小到大的顺序依次排列的。若某节点接收到的报文的源节点位于该节点与其逻辑后继的通信序列之间,则该节点需将逻辑后继更改为报文的源节点。否则,节点的逻辑后继无需加以更改。稳定的逻辑环路通信建立以后,如果某一网络节点由于某种原因不能发送或接收ring报文,而其它节点在计时器Tmax(2个ring报文之间传送的最大时间)到期后认为该节点离线,从而进入子状态NMReset(NM节点重置)。
车载网络对于网络管理机制的实时性有着极为严格的要求,因此,网络中的节点启动后应该尽快建立逻辑环路。需要说明的是,新的网络节点的加入应建立在稳定的逻辑环路通信已实现的基础上。然而,对于新的网络节点加入时机,仍需讨论。间接网络管理的具体状态转换如图1所示。
2.2 系统结构
本系统的实现主要以项目的实际需求和现有的硬件设备为基础。这里主要是采用无需OSEK OS(OSEK操作系统)支持的间接NM的逻辑环路。
假定有3个节点,即节点1、2、3依次上线,待节点1、2建立了稳定的逻辑环路通信的基础上,节点2接收到Destination(目标源,以下简称D)=2的ring报文后,节点3发送D=3的a1ive报文申请加入逻辑环路通信。下面是以3个节点的网络为例,来说明稳定的逻辑环路通信是如何实现的。
其具体形成过程如图2所示。节点1和节点2同时上线,由节点1先发送一个ring报文并在Tmax到期前到达,这时节点2发送的报文在其TTyp(2个ring报文之间传送的标准时间)到期前到达,然后在节点1和节点2的报文都发送成功以后,这时节点3就开始上线并发送a1ive报文。节点3在上电启动后先等待,直到节点1发送的D=2的ring报文到达后才发送D=3的a1ive报文,接着就进入其子状态NMNorma1。
OSEK间接网络管理的静态状态检测算法是灵活的、可分级的。它通过在系统产生时来设置固定的De1taInc和De1taDec,其允许对于静态状态选择不同种类的检测。
3 试验
3.1 试验简介
由于文章旨在进行远程故障检测,所以我们自行设计了CAN节点所构建的逻辑环路通信来进行本次试验。本次试验中所用到的相关器件为:中央控制单元采用PIC18F2580单片机;节点间的通信使用CAN2.0B协议;车载网关采用三星公司的S3C2440为CPU的ARM开发板,使用MCP2510 CAN控制器与总线通信。
CAN2.0协议通信的接收机制是通过设置过滤寄存器和屏蔽寄存器来过滤29位扩展标识符,以判断是否需要接收总线上在当前传输的CAN报文[4]。这里需要指出的是,在SIDL(预留位)bit7~bit5中故障处理和其回执标识位分别为bit1和bit0,而1表示需要操作,0表示误操作。CAN报文的标识符域和数据域的具体使用情况如图3所示。
3.2 测试结果
将CAN节点与车载网关以总线连接,通过车载网关可以提取如表1数据,以验证稳定逻辑环路通信的形成过程。
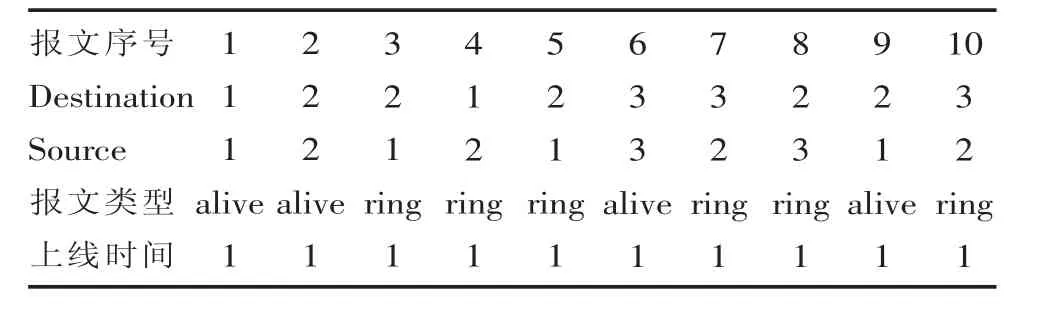
表1 网络节点形成稳定逻辑环路通信的数据
4 总结
试验表明,在CAN网络中提出并实现了无需OSEK OS支持的间接网络管理来对各网络节点进行监控的系统方案。通过提取数据,来对各网络节点形成稳定逻辑环路通信的过程加以定量的分析和验证,并在此基础上提出了远程故障诊断系统的方案。
目前这种监测系统已经应用在吉利汽车的HL-1车型上,主要是采用本地诊断来进行通信故障的诊断,然后将诊断结果通过无线网络上传到后台服务器上,最后进行远程服务来响应,从而可以准确快速地进行故障排除措施。HL-1车型有一辆车在加装一套防盗器和中控门锁后出现了电动车窗无法工作的现象,这时利用这套监测系统进行实时监测后,发现是在加装这2个附件时,用了试灯测量电脑管脚而误把试灯接头插入诊断导线K线或L线,给了电脑一个错误的编码信号,从而导致了这次故障。利用远程故障诊断系统进行实时监测,可极大地提高汽车的动力性、安全性和舒适性。
[1]The OSEK/VDX Group.OSEK/VDX Operating System,version 2.2[EB/OL].
[2]CAN Specification V2.0[OL].http: //www.z1gmcu.com.
[3]王明玉,董 浩,王 建.基于GPRS的车载故障诊断网关的设计与实现[J].汽车工程 , 2009, 31 (10):999-1 003.
[4]潘巨龙,黄 宁,姚伏天,等.ARM9嵌入式Linux系统构建与应用[M].北京:北京航空航天大学出版社,2006.