手持GPS定位精度与误差的研究①
2011-07-18王克晓李凤友刘焕玲邢卫军任洪文
王克晓,李凤友,刘焕玲,邢卫军,任洪文
(1.天津铁道职业技术学院,天津300240;2.中国测绘科学研究院,北京100830;3.山东黄金焦家金矿,山东 莱州261441)
0 引 言
手持式GPS是一种利用新一代卫星导航与定位系统,体积小巧、携带方便的定位导航设备,具有全天候、全方位实时三维导航与定位能力[1-2]。
随着全球定位系统的发展,手持式GPS广泛应用于国民经济各领域。目前,无论是静态测量型、动态(RTK)还是手持导航等机型已广泛应用于大地测量、地质调查、资源勘查等众多领域,并逐步深入到人们的日常生活。近几年,随着技术的不断完善以及美国SA政策的解除,手持GPS接收机的定位精度较之以前有了很大的提高。
邓钟对基于手持式GPS野外导航地图的制作研究中提到单点定位精度可达到其标称的10m以内的精度,若做一些差分处理,可达到1~5m以内的精度,在比例尺为1∶10 000的地图上误差不到1mm[3].王晓明在提高手持GPS定位精度的方法研究中提到,标准五参数设置法平面中误差为3.6m,三维中误差为5.6m[4].需要系统地研究手持式GPS使用精度以及误差影响。
1 手持机的简介
手持机根据定位精度可以分为:米级、亚米级。其中亚米级中包括精度更高的10~30cm精度的手持机和10cm以内精度的手持机。
手持机的主要应用领域:国土调查及执法监察、电力线巡检、配电GIS系统、数字城市、林业资源调查、污染源普查、地质调查、地籍测量、农业、通讯行业和市政工程等。
产品特点与功能:高分辨率VGA显示器可显示清晰地图;具有Bluetooth和无线局域网连接选项;1GB内置存储器和SD可拆除卡插槽;Windows Mobile v6操作系统;坚固耐用的手持机内置可供全天使用的电池;支持北京54、西安80、国家2000及用户自定义坐标系统,多种数据格式的输出可为不同平台软件直接提供可以使用的数据,输出文件格式包括采用了行业标准的数据接口结构,支持多种GIS或者CAD平台。
2 手持GPS定位试验方案
手持GPS定位稳定性研究主要包含观测时长和内符合精度两方面的内容。所谓的观测时长就是指测定一个点需要多长时间才能使观测结果的精度比较高而且稳定;内符合精度是指在不同的观测时段测定同一个点的结果的符合程度[5-7]。
2.1 观测时长对定位精度影响的试验
分别采用3台天宝手持GPS(型号GeoXH)对某校区内的点进行实测,在同一个点上每间隔一定时间记录一次观测结果,观测结果如表1所示。

表1 手持式GPS的不同时长的定位结果
1)快速观测结果分析
从表1中可以看出,使用的3台手持式GPS测量的稳定性与时间的关系是一致的,当在1个点上持续观测1min以上时,3台仪器各自测定的X互差最大值在1m以内,Y坐标各自测定的互差最大值在1m以内,与真实值的差值在1m以内,由此可以得出,其观测结果基本达到稳定状态。
2)实时动态结果分析
从表1中观测时间为10s的结果与观测时间为30s以及以后的观测值相比较,X坐标值差值最大的为0.84m左右,最小的达到0.06m左右;Y坐标最大的差值在0.87m左右,最小的差值在0.36m左右。显然,动态观测结果跳跃较小,稳定性相对不错。
2.2 内符合精度大小的试验
评价仪器的可靠性需要从仪器的精度和仪器的稳定性两方面入手。对于同一台手持机如果外界观测条件一样,只是观测的时间段不一样,得到差别较大的测量结果,而测量结果的差异又没有规律,这样无法谈论仪器的可靠性和精度[8-9]。针对这种情况,试验中通过不同的时间段对相同的点重复的观测研究仪器的稳定性。通过在不同的观测时间段重复观测相同的点来研究手持机的稳定性。重复观测选在上午10点和下午3点两个时间段,重复观测相同的点位,由此可以得出,相同点两次观测求差结果如表2所示。
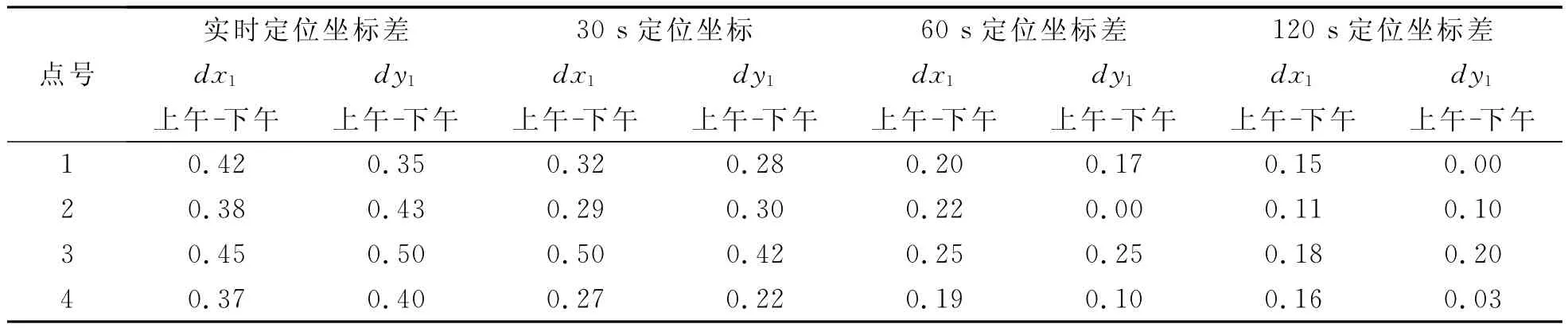
表2 相同点两次观测求差
根据表2中的数据利用公式(1)可以计算出4种观测时长的测量稳定度。

式中的L为相同观测时长的不同观测时段的观测值较差;n为较差的个数。
实时定位的稳定度为 mL=±0.41m;
30s定位的稳定度为 mL=±0.34m;
60s定位的稳定度为 mL=±0.19m;
120s定位的稳定度为 mL=±0.13m.
当某一个点受到外界的影响变化相对较大时,这个点的数据必须被剔除掉。在这次试验中,点3由于受到外界建筑物的影响,在计算稳定度时剔除该点,则
实时定位的稳定度为 mL=±0.38m;
30s定位的稳定度为 mL=±0.28m;
60s定位的稳定度为 mL=±0.17m;
120s定位的稳定度为 mL=±0.11m.
据以上数据可以得出,手持GPS定位时长120s以上的稳定度要比实时定位稳定度高3倍,定位时长60s和120s的稳定度可以认为是同等的。
2.3 手持GPS绝对定位精度试验
绝对定位精度是指测量值与真实值的符合程度,手持GPS绝对定位的准确度指测量的结果与其真实位置符合程度。为了使真实坐标更加准确,采用国家80坐标为基础进而解算出来的坐标(也就是地方80坐标);通过坐标转换模型,将国家80坐标转换成手持式GPS的设置坐标,也就是WGS-84坐标。真实坐标的点位误差相对于手持式GPS的定位误差的影响非常小,可以忽略不计,这种地方坐标值可以认为是坐标真值。观测值与其差值就是真误差Δ,依据公式

可以得出6种不同观测时长的绝对定位精度列于表3中。

表3 剔除粗差前的外符合精度
将dx或dy的值的水平精度偏低的点认为含有粗差,所以将这些点剔除重新进行外符合精度分析,如表4所示。

表4 剔除粗差后的外符合精度
根据表3和表4可得:实时定位的精度最低,相对于剔除粗差前的精度有所提高。20s和30s的定位精度基本相同;60s和120s的定位精度最高,可以认为定位精度相同。
2.4 手持GPS相对定位精度试验
由于距离测量是通过两端点的坐标计算而获得,故在此将距离测量称为相对定位,因此,手持式GPS相对定位精度也即距离测量精度。在试验中采用了同步相对定位和异步相对定位2种方法。同步相对定位指计算距离的两端点坐标为同步观测值,异步相对定位指计算距离的两端点坐标为异步观测值。观测结果见表5.
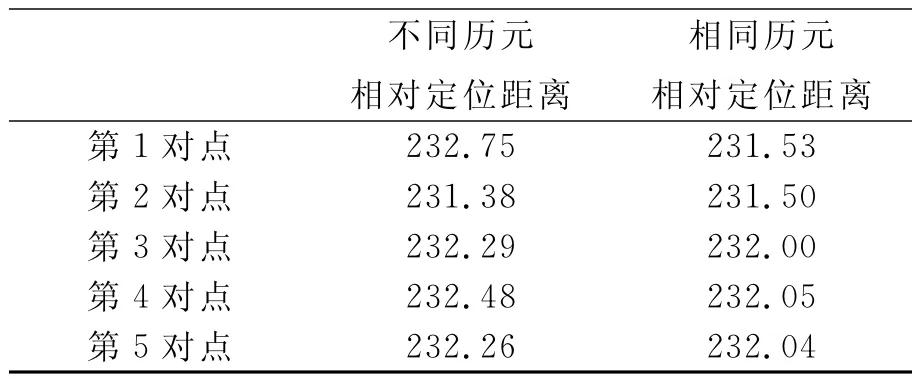
表5 相对定位精度
这5段距离的实际长度都是232m.由表4不难看出:同步距离测量要比异步距离测量结果稳定且精度高。这是因为2台手持机在同一时段内观测了相同的一组卫星,包含有部分相同的误差,因此,测量值具有比较高的相关性,经过数据处理,有效地消除和削弱了卫星星历误差及卫星钟差、电离层、对流层对测距的影响,提高了定位精度。
3 手持GPS定位精度及稳定性分析
3.1 高程定位精度的问题
由于手持机进行定位时,因为持有人的身高的区别;进行点位测量时,不可能每次都把手持机放到地面的点位上;应用手持机测量大多数情况下是直接手持,而不是固定到对中杆上;进行点位测量时,测量者手持仪器距地面点的高度并不是固定不变的;结合这些实际问题,从而对于高程的精度就没有做进一步的研究。
3.2 平面定位精度的问题
据以上数据和图1可以得出,实测观测值与其真值比较,X,Y坐标分布比较均匀。但是手持式GPS定位中还存在着明显的系统误差,误差均在1 m以内,如果对所使用的仪器进行误差模拟来改善系统误差对单点定位精度的影响,所测得数据可以得到更高的精度。

图1 GPS定位误差分布图
观测值的系统误差为
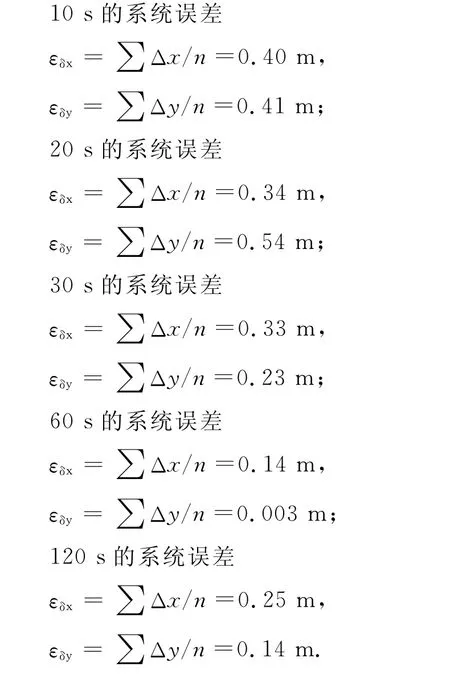
利用上述公式可以得出改正后的残差如表6所示。
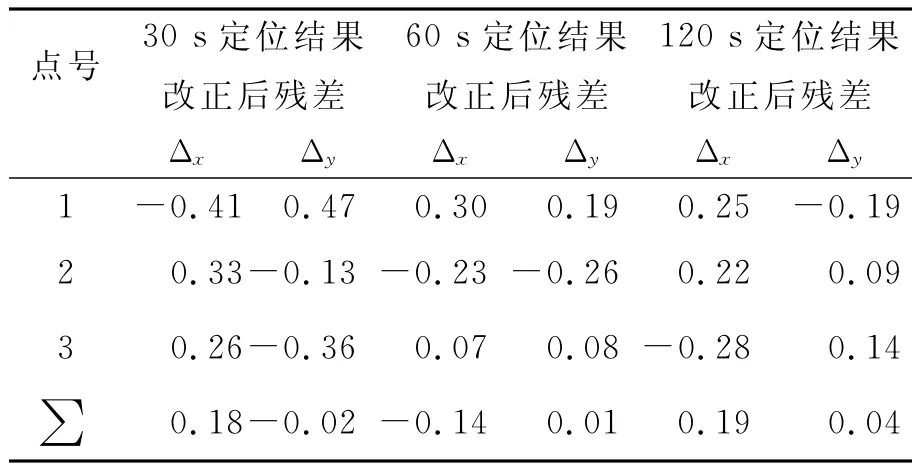
表6 系统误差改正后的残差
从表中数据对比分析,当定位时间适当延长以后,定位结果的残差会比较小,在某些特殊情况下,可能由于人为的操作不当,或者是由于天气原因,致使某些结果会有反常情况的发生。但是,总体的趋势还是正确的。也就是说适当的延长定位时间后,会得到精度更高的结果。
利用以上数据对定位后的点位进行处理后,可以得出精度比较高的点位坐标。得到的这些坐标,可能会因为地理位置,大气层,电离层或者是对流层等的影响从而影响定位的精度。所以,针对某些特定的情况下,得出处理后得到的定位点的精度如表7所示。
从表7的数据分析中可以得出,在不同的定位模式下,也就是说不同的定位时间对定位点的定位精度有较大的影响。根据表中的数据对比,当定位时间延长后,定位精度就会越来越高。在某些精度要求不是很高,可以选择短时间的定位,这样可以节省定位时间,提高作业效率;如果要求定位结果的精度相对比较高时,可以延长定位时间来实现。如果要求的精度很高,最好采用GPS接收机进行静态定位。
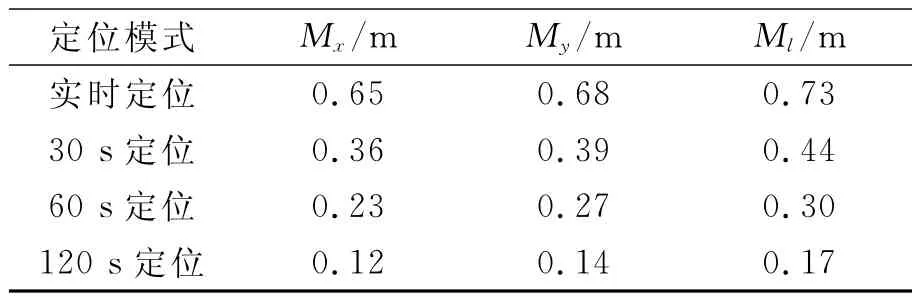
表7 处理后得到的定位点的精度
4 结 论
通过试验可以得出,不经过数据处理的天宝(型号XH)手持式GPS实时单点定位的水平精度可以控制在亚米级的水平上。但是,在某些地区,如果延长观测时间至两分钟以上,或者手持机所测得数据经过处理之后,单点定位上的水平精度甚至达到半米之内或者更高。
[1]刘大杰,施一民,过静君.全球定位系统(GPS)的原理与数据处理[M].上海:同济大学出版社,1996:6-7.
[2]徐绍铨.GPS测量原理及应用[M].武汉:武汉测绘科技大学出版社,2000:1-10.
[3]邓 钟.基于手持式GPS野外导航地图的制作研究[J].闽江学院学报,2008:119-121.
[4]王晓明,高 平.提高手持GPS定位精度的方法研究[J].宁夏工程技术,2009:1-10.
[5]李广俊.手持式GPS精度分析及工程应用[J].西部探矿工程,2009(7):131-133.
[6]龚佑兴.GPS单点定位研究[D].长沙:中南大学,2004:36-56.
[7]周扬眉.GPS精密定位的数学模型、数值算法及可靠性理论[J].武汉:武汉大学学报,2003:6-25.
[8]程鹏飞,蔡艳辉.全球卫星导航系统[M].测绘出版社,2009:122-128.
[9]张丽娜,杨志强.手持式GPS定位误差的研究[J].工程地球物理学报,2006:478-483.