太阳能电动车最大功率点跟踪模糊控制仿真研究
2011-07-07周玉丰
周玉丰
(四川信息职业技术学院 机电工程系,广元 628017)
0 引言
在当代科技的飞速发展中,能源的可持续发展与环保是全球进步的两大主题。相对于内燃机汽车,电动汽车及混合动力汽车,可以说是一种低污染,甚至是零污染的交通工具[1,2]。太阳能电动车是一全新的领域,在推动技术进步和科技向生产力转化方面起着积极作用。
太阳能电动车所处环境的多变性导致了太阳能电池板的输出特性也在不断变化。本文在分析太阳能电动车的能源系统基础上[3,4],用模糊推理系统工具箱设计太阳能电动车的最大功率点跟踪(MPPT)模糊控制器[5~7],并在变化和随机的外界环境下,应用Matlab/Simulink仿真软件包对MPPT模糊控制器控制的能源系统进行仿真研究,以验证模糊控制器的控制性能和控制算法的有效性。
1 太阳能电动车的能源系统
太阳能电动车是通过贴在车身上的太阳能电池板吸收太阳能,通过光电转换将电能储存在车内的电池里,供电机使用以驱动汽车。在光照强度比较大的情况下,太阳能电池板吸收的太阳能通过光电转换而来的电流可以直接驱动汽车,也可以与蓄电池同时供电。储存在电池中的多余的能量可以在不利的天气(如多云、深夜、雨天)使用。太阳能电池板的输出特性随着外界日照强度和温度的变化而变化,且存在着最大功率点,因此,需要在太阳能电池板与蓄电池之间加入直流斩波器(DC/DC变换器),其功能是实现太阳能电池板到蓄电池的电压匹配和通过开关的通断实现最大功率点跟踪(Maximum Power Point Tracking(MPPT))控制。DC/DC变换器中的开关调节通常采用脉宽调制(Pulse Width Modulation(PWM)),通过MPPT控制器实时改变PWM波的占空比来调节和控制太阳能电池板的输出功率,使太阳能电池板工作于最大功率点附近,使其输出功率达到最大[8]。图1为太阳能电动车能源系统原理图。

图1 太阳能电动车能源系统原理图
2 模糊控制器的设计
2.1 模糊控制器的结构
模糊控制的基本原理如图2所示[9~12]。

图2 模糊控制器的基本原理框图
2.2 确定输入变量和输出变量
太阳能电池板的输出功率-电流特性曲线,如图3所示。从图3中可知,不管外界环境如何变化,在太阳能电池板最大功率点处都有dP/dI =0,即功率-电流曲线斜率为零,即目标值。要跟踪太阳能电池板的最大功率点可以采用功率曲线斜率和斜率的变化来进行判断,即作为模糊输入变量E和EC。
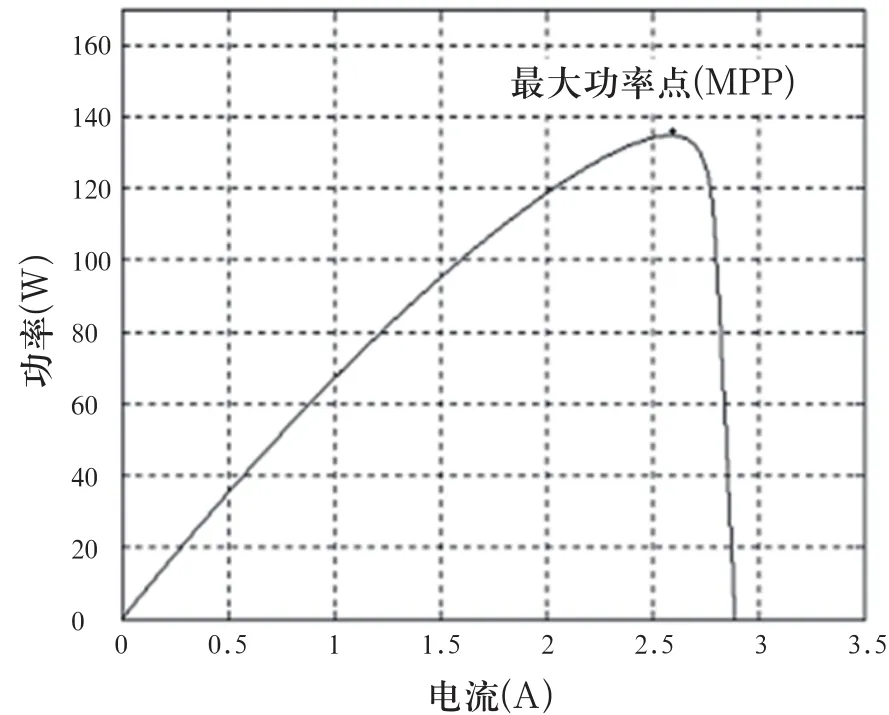
图3 太阳能电池板输出功率—电流特性曲线
输出的控制量U选取占空比的变化量,通过占空比的变化来改变太阳能电池板的输出电流,使其向最大功率点处移动。
对误差E、误差变化量EC及控制量U的语言变量的语言值及其论域定义如下:
EC和U的语言变量的语言值均为{NL,NM,NS,Z,PS,PM,PL}。E的语言变量的语言值为{NL,NM,NS,NZ,PZ,PS,PM,PL},语言变量的语言值为8个,区分了NO和PO,主要是着眼于提高稳态精度。
E 、EC和U的论域分别为X、Y和Z,量化等级均为13个,即:
X=Y=Z={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。
2.3 模糊控制规则的设计
控制规则用模糊条件语句来描述:
1) if E=PL and EC=PL then U=PL
2) if E=PL and EC=PM then U=PL
3) if E=PL and EC=PS then U=PL
…
54)if E=NL and EC=NS then U=NL
55)if E=NL and EC=NM then U=NL
56)if E=NL and EC=NL then U=NL
2.4 确定模糊变量的赋值表
所谓对模糊变量赋值,就是确定论域内元素对模糊语言变量的隶属度。选取隶属函数为简化的三角形隶属函数,如图4所示。
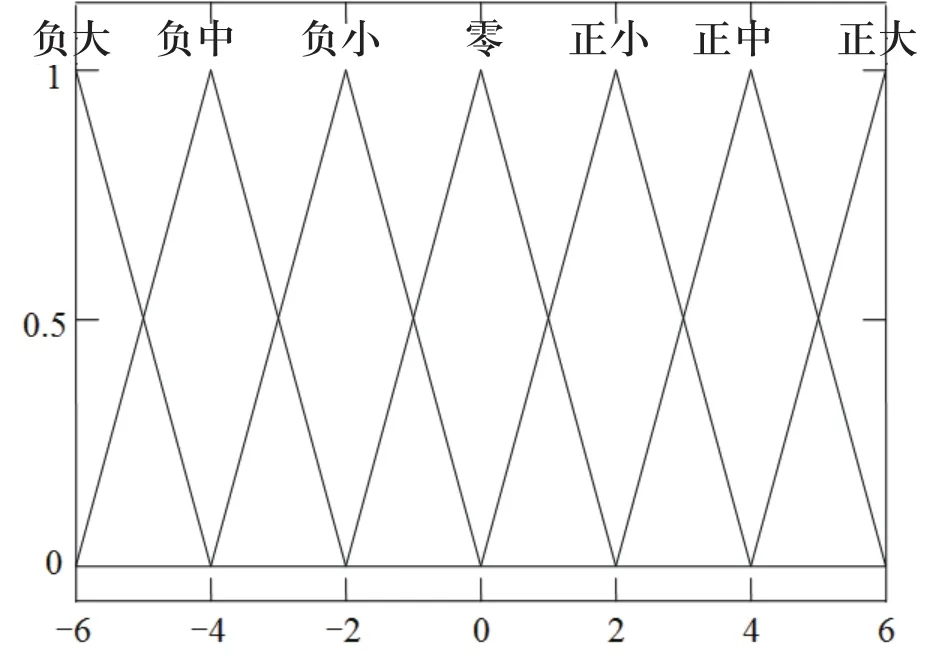
图4 语言变量X、Y、Z的隶属度函数
2.5 模糊控制计算和模糊判决
首先求每条规则所描述的模糊关系Ri,然后求系统的总模糊关系R,即:

利用Matlab进行矩阵计算较简单。然后进行模糊推理,推理方式采用Mamdani极大极小运算法。最后用加权平均法分别对输出模糊集合Uij进行模糊判决。
3 仿真模型
利用Matlab/Simulink软件建立太阳能电动车MPPT模糊控制系统仿真模型和仿真图分别如图5、图6所示。
4 仿真与结果分析
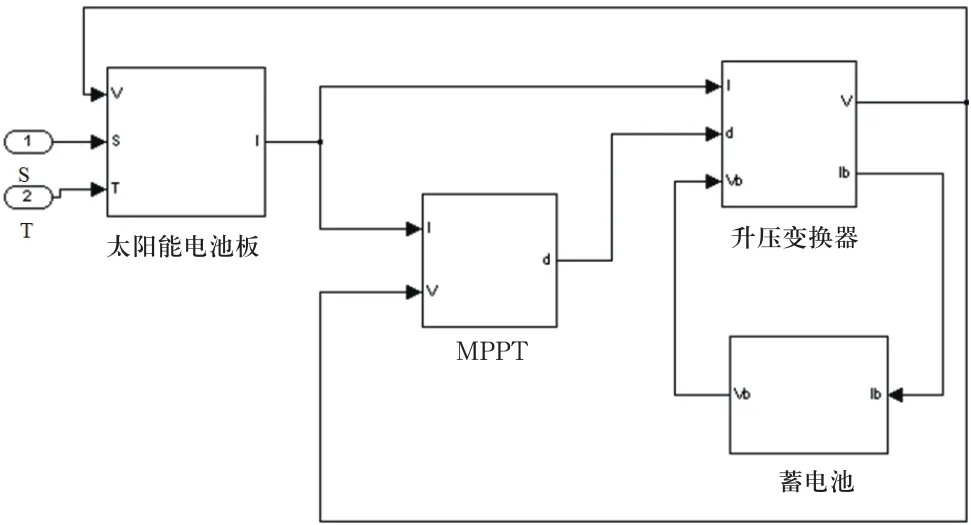
图5 太阳能电动车MPPT模糊控制系统仿真模型
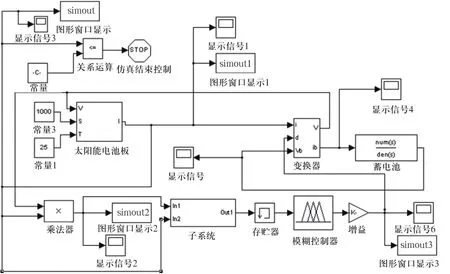
图6 太阳能电动车MPPT模糊控制系统仿真图
4.1 变化外界环境下仿真
由于太阳能电池板主要受日照强度和温度的影响,因此需要在日照强度和温度变化的外界环境下对系统进行仿真。
4.1.1 日照强度变化下的系统仿真
太阳能电动车行驶环境多种多样,特别是道路倾角以及路边树荫等,都将影响太阳能电池板上日照强度的变化,日照强度变化也会出现急剧、缓慢等情况。
日照强度变化模拟如图7所示。
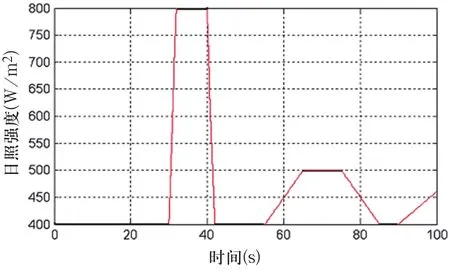
图7 日照强度变化模拟曲线
系统在日照强度变化下的模糊控制策略仿真结果如图8所示。由图8可知,功率变化趋势与日照强度变化保持一致,且功率波动较小。

图8 日照强度变化时模糊控制功率曲线
4.1.2 温度变化下的系统仿真
温度变化不同于日照强度,因为太阳能电池板的温度不可能急剧增加,然而却可以因为下雨和其他因素急剧降低。因此这里考虑温度的急剧降低和缓慢变化。
温度变化模拟如图9所示。
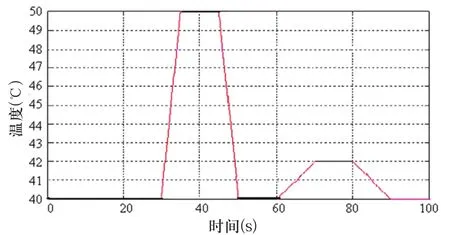
图9 温度变化模拟曲线
系统在温度变化下的两种控制策略仿真结果如图10所示。由图10可知,在温度急剧变化时,功率变化幅度不大,模糊控制的功率维持在近似的最大功率点附近,达到了控制要求,显示了MPPT模糊控制优越的控制性能,并且功率波动较微小,获得了较高的功率水平。
4.2 随机外界环境下仿真
为了更接近于外界环境,在随机的外界环境条件下,采用 MPPT模糊控制对系统进行了仿真。其中,日照强度和温度均采用用Matlab/Simulink中白噪声(White Noise)来模拟,使仿真结果更具有通用性和说服力。
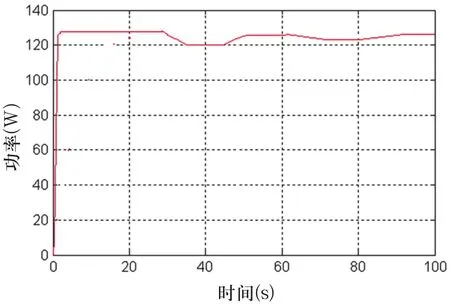
图10 温度变化时模糊控制功率曲线
外界环境日照强度和温度变化模拟分别如图11、图12所示。
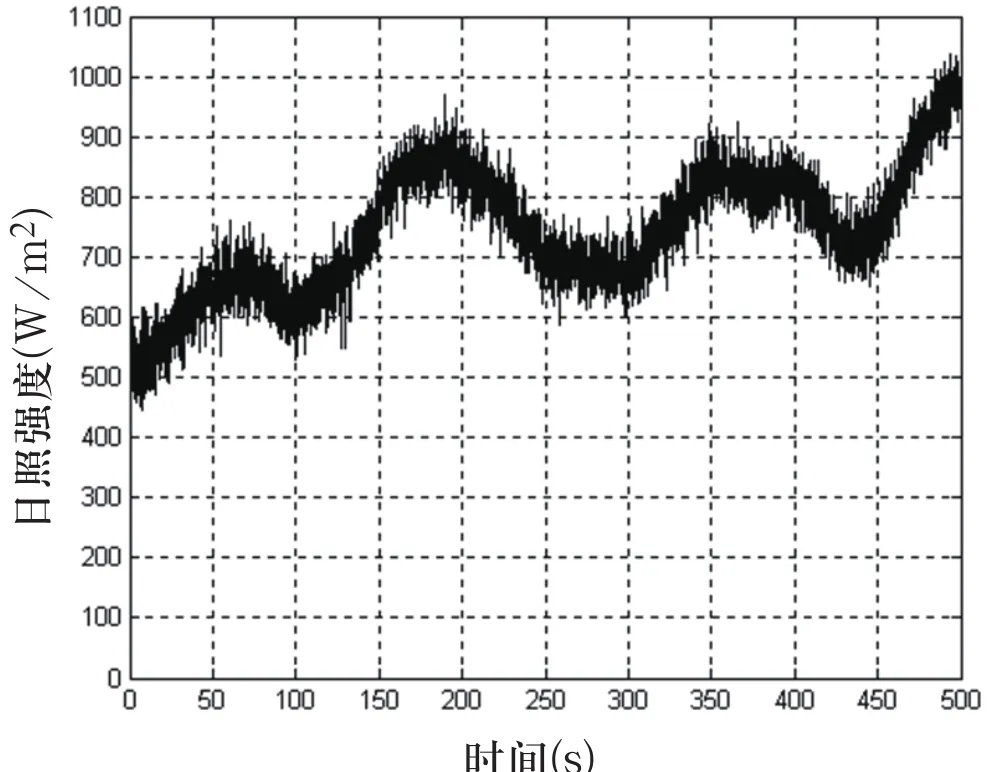
图11 随机外界环境日照强度变化模拟曲线
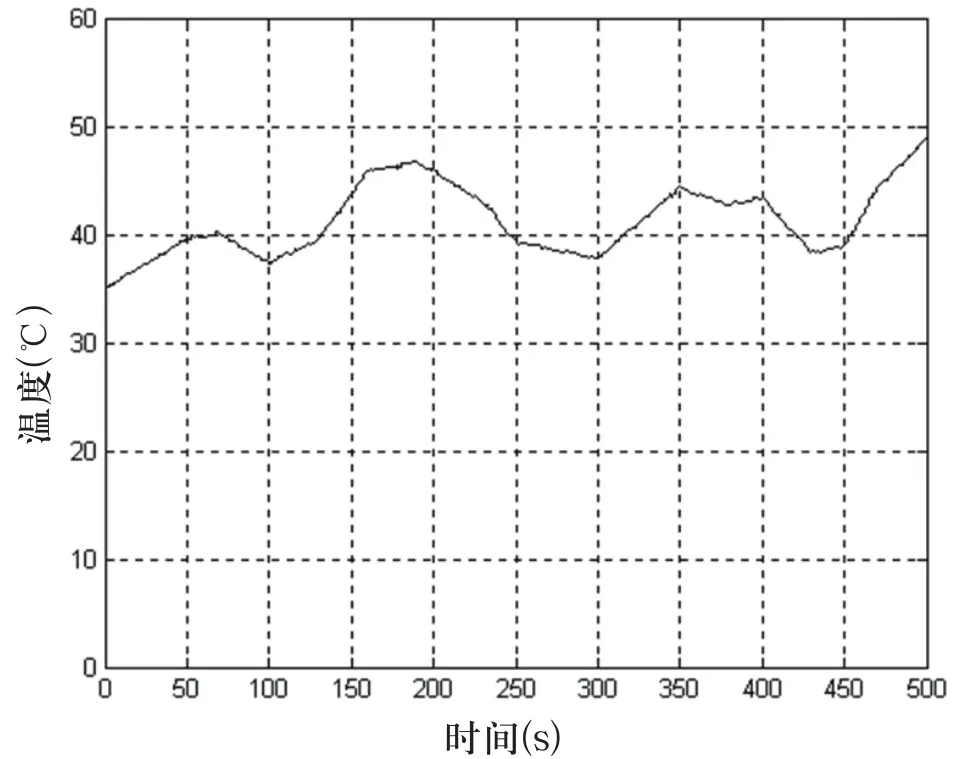
图12 随机外界环境温度变化模拟曲线
在上述随机日照强度和温度下,直流斩波器(DC/DC变换器)的占空比输入如图13所示。可见,占空比调整趋势同日照强度和温度基本一致,证明了MPPT模糊控制实现了实时跟踪控制。
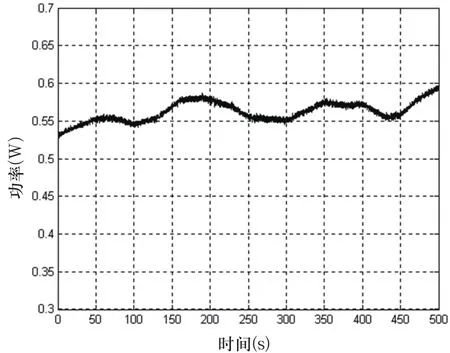
图13 随机外界环境下占空比控制曲线
系统在随机外界环境下的模糊控制策略仿真结果如图14所示。由图14看出,太阳能电池板的输出功率基本上随日照强度和温度的变化而变化,显示了MPPT模糊控制优越的控制性能。
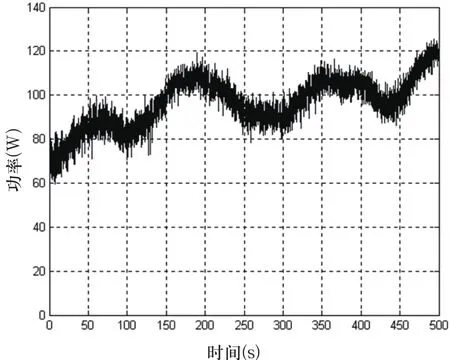
图14 随机外界环境下太阳能电池板的功率曲线
5 结论
通过在变化和随机外界环境下所作的仿真,可以看出MPPT模糊控制在变化的外界环境下能够有效地抑制工作点偏离,从而抑制了功率波动,使系统维持了较高的功率输出水平,具有阵列重构法和虚拟负载法无法比拟的优点,适应了太阳能电动车多变外界环境的要求,显示了模糊控制策略优越的控制性能,适合在太阳能电动车中应用。研究结果说明了本文的模糊控制方案是正确的,所设计的模糊控制器具有较高的稳态性和较强的鲁棒性,达到了预期的目的,为太阳能电动车的应用提供了参考。
[1] 吴志新,玉梅,褚韶华.清洁汽车和洁净车用能源的发展[J].国际石油经济,2000,8(5):11-13.
[2] 岳东鹏,郝志勇,张俊智.混合动力电动汽车研究开发及前景展望[J].拖拉机与农用运输车,2004(2):1-4.
[3] 祁俊荣,钟绍华.太阳能混合动力电动、汽车驱动系统及模糊控制[J].上海汽车,2006(5):2-5.
[4] 王晓璨,张朋松,张丽华,等.太阳能电动车电源控制系统的研究[J].机械与电子,2009(12):36-38.
[5] 任碧莹,钟彦儒,孙向东等.基于模糊控制的最大功率点跟踪方法研究[J].电力电子技术.2008,42(11):47-48.
[6] 袁路路,苏海滨,武东辉等.基于模糊理论的光伏发电最大功率点跟踪控制策略研究[J].电力电子.2009,3(1):18-21.
[7] 时剑.太阳能最大功率点跟踪控制系统的研究与实现[D].江苏大学,2009.
[8] 陈红.基于模糊控制的太阳能电动车最大功率点控制研究[D].西安交通大学,2005.
[9] 李炜,朱新坚.光伏系统最大功率点跟踪控制仿真模型[J].计算机仿真,2006,23(6):239-243.
[10]韩峻峰,李玉惠,等.模糊控制技术[M].重庆大学出版社,2003.
[11]汤兵勇,路林吉,王文杰.模糊控制理论玉应用技术[M].清华大学出版社,2002.
[12]李慧慧,孙志毅.基于模糊控制的光伏发电最大功率点跟踪[J].科技资讯,2010 (7):121-122.
