一种新型高灵敏度三维成像系统电路设计
2011-07-05吕月锋王华闯
吕月锋,王华闯
(1.中国科学院光电技术研究所,成都610209;2.中国科学院研究生院,北京100039)
0 引言
高灵敏度激光三维成像探测是利用激光器设备,通过发射大功率,窄脉冲激光去照射被探测目标,并由高灵敏度探测器接收目标回波信号,最终获得目标信息的一种先进光电探测技术。三维成像系统能够提供比传统的二维强度图像更为丰富的信息,如距离、方位、大小和姿态等,极大地改进了对目标识别和分类的性能,因而得到越来越广泛的应用[1]。
三维成像的核心问题是距离信息的获取,并在此基础上形成角度-角度-距离三维目标图像。本文提出了一种基于时间间隔测量法测距成像技术的新型高灵敏度三维成像系统,并通过对三维成像质量影响因素的分析,重点论述了测距模块的技术设计方案,并有效提高了测距精度。
1 高灵敏度三维成像系统组成和工作原理
本系统主要由激光器、探测器、光机系统、控制单元、计时器单元、图像记录处理单元和显示单元等组成。其中回光接收探测器是该系统的一个重要组成单元,采用了具有单光子探测能力的SPMArray4阵列。SPMArray4阵列探测器是由爱尔兰SENSL公司生产的一款高灵敏度阵列探测器,该探测器总共有16个像素,每个像素由3640个雪崩光电二极管微元组成,当其工作在盖革模式下时具备单光子探测能力,具有灵敏度高、一致性好、增益大(以上)、尺寸小(13mm*13mm)、不受电磁场影响、工作电压低(30V以上)等众多优点。
系统工作时,首先根据需要调整激光器激光重复频率和光强,发射激光去照射被探测目标;激光出光探测器准确探测激光的出光时刻并送出一出光信号,此信号送入FPGA控制单元,作为各种脉冲时序同步源。以出光信号为基准延迟一段时间后经FPGA送出一脉冲作为计时器的Start信号,触发计时器开始计时;SPMArray4阵列探测器相应像素接收到目标回波信号后,一路将回波信号送入A/D转换器来获得回波信号的幅度信息,存入FPGA内部RAM或外部SRAM中;另一路则经过放大整形处理后产生Stop信号去停止计时器计时,利用计时器测量的激光飞行时间间隔获得目标的距离信息;最终FPGA对获得的目标回波信号幅度信息和距离信息进行处理后经D/A转换器输出送入显示设备获得直观目标三维图像。整个系统组成框图如图1所示。
2 系统接收电路主要模块设计
2.1 基于SPMArray4阵列探测器的回波信号读出电路设计
由于探测到的目标回波信号很微弱,因此在读出电路设计首先利用前置放大器对其进行放大处理,随后经A/D驱动器和滤波处理后进入A/D转换器进行采样并送入FPGA进行后续处理。探测器回波信号强度信息读出电路设计框图如图2所示。

图1 基于SPM阵列三维成像系统组成框图

图2 探测器回波信号强度信息读出电路设计框图
2.2 测距模块电路设计
该系统三维距离信息的获得是利用时域映射原理,把距离测量转化为时间间隔测量,利用光速、时间和距离的关系获得目标距离信息。由此可见,三维成像测距精度直接受时间间隔测量精度的制约,因此高精度时间间隔测量模块设计在系统电路设计中是必不可少的一个重要环节[2][3]。由于激光飞行时间间隔是基于激光发射脉冲和目标回波信号来获得的,所以时间测量的主要误差主要来自回波脉冲时刻前沿鉴别误差和时间间隔测量误差两个方面[4],下面对这两部分电路分别进行论述,并给出了设计解决方案。
2.2.1 时刻鉴别电路设计
不同距离的目标回波信号幅度会因探测目标的特性和距离而变化,而且经过大气的传输和衰减使得接收到的信号在幅度上有很大的差异。如果仅仅采用前沿固定阈值来判别到达时刻,难免会引入漂移误差,如图3所示[5]。因此,本文中时刻鉴别电路不采用固定的阈值电压来判别到达时刻,而是采用一种固定比例的恒比定时时刻鉴别电路(如图4所示),一路经过衰减,另一路经过延迟,然后将两路信号分别送到超高速比较器芯片ADCMP572的正负输入端,在两输入信号相对大小发生改变的时刻比较器状态发生改变,作为Stop信号送到计时停止端口,停止计时。由于系统采用的是高灵敏度探测器,响应时间很短,因此我们假定目标回波信号的上升时间是固定的。因为采用的是恒定比例时刻鉴别,所以鉴别时刻与回波信号幅度无关,消除了因回波信号幅度差异引起的漂移误差,从而提高了测距精度。

图3 前沿鉴别漂移误差 图4 恒比定时时刻鉴别电路
2.2.2 高精度时间间隔测量电路设计
影响测距精度的另外一个关键因素就是时间间隔的精确测量。本文采用一种基于延迟线插入技术的时间数字转换芯片TDC-GP2来提高时间间隔的测量精度。该芯片单次测量时间分辨率可达65ps,测距精度可达10mm。
该芯片是以信号通过内部门电路的传输延时来进行高精度时间间隔测量的。其原理主要架构如图5所示。测量时,只需计算出终止信号到达时起始信号经过的逻辑门电路的个数,就可精确计算出激光飞行时间[6][7]。
该时间间隔测量模块中,Start信号为经过一定延迟的激光器出光信号,Stop信号为回波信号经放大整形后产生的脉冲信号。系统工作时,TDC-GP2计时芯片准确测量Stop信号到来时Start信号经过非门的个数,最终完成激光飞行时间测量。TDC-GP2外围硬件电路连接如图6所示。

图5 TDC-GP2绝对时间测量系统原理架构图
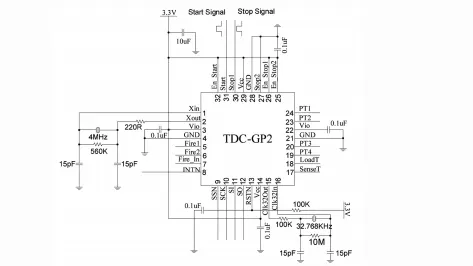
图6 TDC-GP2外围电路图
2.2.3 FPGA 控制模块设计
本系统采用Xilinx公司生产的XC6SLX150芯片作为控制核心,通过对其编程完成计时器芯片寄存器配置、A/D寄存器配置及转换数据读取、D/A转换时刻控制、SPM探测器工作状态控制及计时起芯片工作开始时刻控制等操作。
整个系统接收电路有两部分组成:探测器回波信号读出电路、时刻鉴别电路组成的模拟电路和时间间隔测量单元、A/D转换器、D/A转换器及FPGA、SRAM等组成的数字电路部分。整个接收系统硬件电路实物图如图7所示。

图7 整个接收系统硬件电路(数字板和模拟板)实物图
电路配置调试完成后,采用示波器对各种控制波形进行实际信号测试,可以实现计时芯片工作开始时刻可控、探测器工作状态可控等控制,满足成像探测系统要求,如图8所示。

图8 脉冲延迟、脉宽可控实际测试波形图
3 结论
本文提出一种采用高灵敏度阵列探测器的三维成像系统,在介绍其工作原理的基础上对接收电路中各个主要模块进行了设计,并重点对影响测距精度的测距模块进行了分析设计。通过采用恒比定时时刻鉴别电路和专用高精度时间间隔测量芯片TDC-GP2对接收回波信号的预处理,有效提高了测距精度,为后续三维成像及处理提供了条件。最后对计时器开始时刻可控、探测器工作状态可控进行了实际信号测试,实现了可对不同景深范围内的目标探测成像控制功能。
[1]蔡喜平,李惠民,刘剑波,等.主动式光学三维成像技术概述[J].激光与红外,2007,37(1):22-25.
[2]李杨,杨军,曹成哲.用于精密测量的激光测距技术研究[J].仪器仪表用户,2009,16(5):4-6.
[3]黄震.脉冲激光测距接收电路与计时方法研究[D].杭州:浙江大学,2004.
[4]陈弈,郭颖,杨俊,等.脉冲式高精度激光测距技术研究[J].红外,2010,31(6):1-4.
[5]纪荣祎,赵长明,任学成.脉冲激光测距时刻鉴别方法的研究[J].红外,2010,31(11):34-37.
[6]冯国旭,常保成.高精度激光测距技术研究[J].激光与红外,2007,37(11):1137-1140.
[7]仲峰,万莉萍,岳宇军.高精度时间测量芯片TDC-GP2在激光测距中的应用[J].工业控制计算机,2007,20(4):69-72.
