电力推进船舶功率管理系统综述
2011-07-03尚安利张达宽栾诚
尚安利 张达宽 栾诚
(1. 海军92337部队验收部,大连 116023;2. 南京大学物理学院,南京 210093)
近几十年来,随着电力电子技术的发展和大功率交流电机变频调速技术的目趋成熟,船舶电力推进逐渐显示出其优越性,成为未来船舶动力装置的发展方向[1]。
电力推进船舶的电力系统主要由发电系统、配电系统、用电负载(推进电动机等)和功率管理系统(Power Management System,PMS)等部分组成[2,3],船舶日用供电和推进供电一体化。
另外,随着船舶用电负载功率的增加,船舶的发电、配电和用电负载的电能管理变得异常复杂[2,3],必须对船舶发电系统、配电系统和用电负载的电能进行有效管理,保证船舶具有足够的可用功率[2],预防船舶电力系统断电,且使得燃料消耗最小,这样既可以保证设备正常运行,又可以减少设备的维护成本,提高设备的完好率。
1 功率管理系统的组成和基本结构
当前,典型的 PMS的硬件组成为可编程逻辑控制器(PLC)、多功能电子式保护继电器以及触摸式液晶显示控制面板等。电站的功率管理功能由 PLC实现;电网和发电机的保护监视功能由电子式多功能保护继电器实现;功率管理系统的手动遥控功能和重要参数及状态指示和设置由触摸式液晶显示控制面板实现。
PMS的结构配置分为镜像型和热冗余型两种[4]。镜像配置包括两套 PLC,在正常情况下,每套 PLC仅负责部分电力系统的管理与监控,同时,这两套 PLC可以通过现场总线进行信息共享,当其中一套 PLC发生故障时,另一套PLC将负责整个电力系统的管理与监控。在热冗余型配置情况下,电站的功率管理功能应由两套互为备用的PLC实现,一套PLC为主用控制器,另一套PLC为备用控制器,一旦主PLC出现故障,备用 PLC应立刻被自动切换成主用控制器,保证主 PLC的故障不对运行的发电机和电网的安全造成任何影响。
2 船舶功率管理系统的功能
2.1 根据电网可用功率的变化自动启动和关闭发电机组
PMS可根据船舶电网上的可用功率的大小启动或关闭发电机组,这里可用功率为当前所有并网发电机额定功率之和与整个电力系统用电负荷之差[2],即

式中,Pr,av为可用功率,Pr,g(k)为所有并网发电机的额定功率Pr,gi之和,Pg为并网所有负载的消耗功率。
启动发电机组
如果可用功率小于预先设定的门限值且持续时间超过设定的界限时,PMS将依据预先制定的启动次序表依次启动备用发电机组,可用功率门限值和持续时间界限可由电力系统结构、船东或船舶设计者等多方面因素决定。
关闭发电机组
当发电机组中的原动机在低功率状态下运行,或发电机的载荷小于其额定功率值(如50~60%)且持续时间超过一定时间(约几十秒)时,可以依据预先制定的次序表依次关闭发电机组。这样既可以减少燃料消耗,又可以降低设备的维护成本,例如柴油机载荷小于其额定功率的 30~50%时,在燃烧室和排气道内将会积累大量的烟灰,这将导致柴油机点火经常失败,从而进一步增加柴油机内烟灰的积累,最终导致柴油机不能正常工作[5]。
发电机组的启动和关闭与电网功率的关系

式中,λ∈[0,1],PL,start(k)表示即将启动下一套发电机组使得并网机组数为k+1时的电网总瞬时功率值。PL,stop(k+1)表示即将关闭发电机组使得并网机组数为k时的电网总瞬时功率值。如图1所示,在实际应用中,为了避免发电机组频繁地启动和关闭,采用折衷的方法选取PL,stop(k+1)的值,即将其选在PL,start(k)与PL,start(k+1)之间[6]。
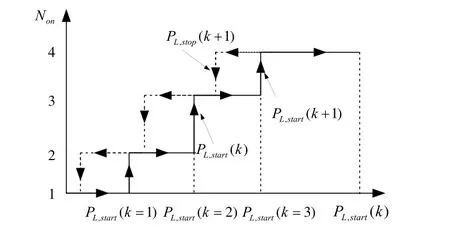
图1 电网可用功率变化与启动/关闭发电机数之间关系
注意:1) 启动发电机后应保证不引起PMS或船舶其它管理系统因可用功率过大而关闭其它发电机组;
2) 关闭发电机组后应保证不引起 PMS或船舶其它管理系统因可用功率过小而卸载正在工作的负载或启动备用发电机组;
3) PMS应对发电机组(原动机和发电机)的各种传感器信号做出反应,保护发电机组免遭损害。
3.2 频率控制与有功功率(kW)分配
对于电网频率控制,可通过调速器来控制原动机的转速使其保持规定的频率(恒频模式,Isochronous Mode)或频率范围(下垂模式,Droop Mode)。调速器分为机械式和电子式[5],电子式调速器可连续调节,且可通过远程接口与PMS相连。进行频率(或转速)的控制仅是调速器的基本功能,更重要的是对并联在电网母线上发电机组之间的负载分配问题。调速器工作模式分为下垂模式和恒频模式[5,7~9],工作模式可通过控制接触器实现下垂模式和恒频模式之间的转换。
下垂模式
并联发电机组间的有功负载分配可直接由调速器主动和实时进行,效果与调速器动态性能有关。而 PMS不能主动地进行发电机之间的即时负载分配,需要通过调节调速器的转速设定值来进行功率平衡和频率校正(即补偿转速下降)[5,7],速度下降的计算公式为

在下垂模式下,调节一台调速器的设定值将影响发电机之间功率平衡和母线频率,而同时调节所有调速器的设定值将影响整个系统的频率[7]。
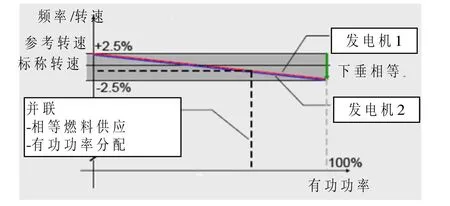
图2 下垂模式下并联发电机有功负载分配
另外,由于频率校正的时间间隔较长(约几分钟),一般要求 PMS发出的频率校正命令间隔不能太短,否则易引起电网功率和频率的波动,严重时这种波动容易引起系统失稳。通常 PMS应理想地调节功率平衡,应仅在发电机并网后或卸载之前进行功率平衡操作[5]。如图 2,在实际应用中,下垂控制模式可取得良好的功率分配和频率调整精度,例如西门子公司的 PMA300系列能确保在稳态工况下,有功功率的分配精度不超过 5%,频率调整精度不超过 0.5%。通常,允许速度下降的百分比为 3~5%,这也就是稳态时允许频率波动的范围±2.5%的原因。
恒频模式
在恒频控制模式下,发电机组之间的有功负载分配通过电子式调速器实现[8],调速器之间通过负载分配线相连,进行发电机组之间功率分配。在实际应用中,功率分配非常精确,而且电网频率为定值,但这要求并网的发电机组所配的调速器和执行器具有相同品牌和型号。通常,对称地分配负载,除非有意识地加入偏置[7]。
非对称负载分配
通常,负载分配为对称的,然而在某些情况下需要非对称操作,例如,刚检修完的发电机组需要运行在一定的工作状态下以检验其性能,要求与并联的其它发电机组的负载分配非对称。
对 PMS来说,管理非对称负载分配比较容易,而且在某些情况下采用非对称负载分配可以使发电系统性能达到最优。
注意:在实际工作过程中,如果负载分配线短路将使得原动机燃料供给减少,最终导致发电机组断路器跳闸。另外,在下垂模式下,PMS可控制其外部转速和负载平衡,这样发电系统控制具有较高水平的冗余。当相同型号和性能参数的发电机组(包括调速器)并网时,采用恒频控制模式较为理想,而将下垂模式作为备份,一旦恒频模式出现故障,PMS应能立刻激活下垂模式进行有功负载分配。
3.3 电压控制与无功功率(kVAr)分配
发电机端电压调节和并网发电机之间无功负载分配是通过自动电压调节器(Automatic Voltage Regulator,AVR)执行。AVR 控制为下垂模式,PMS通过远程接口与 AVR相连,向AVR提供补偿信号,对 AVR电压设定点进行连续“监控”调节,以提高电网的电压稳定性和无功功率的分配精度。
在实际应用过程中,仅采用下垂控制的效果不理想,可采用下列方法减少或消除负载引起的电压降[3,9]:
电压下降补偿,是非常广泛使用的无功功率控制模式,通过调节 AVR的电压设置值来部分或全部补偿电压下降,电压下降与无功负载有关,即无功负载增加将引起发电机端电压下降。
横流补偿,是非常复杂的无功功率控制模式,采用该方式可使电压保持为恒定值,且并联发电机之间无功功率得到平衡。
积分器,在AVR或PMS中包含一个积分控制器来调节电压,避免稳态电压变化。
另外,在实际电力系统中,应船东的要求,可在主配电盘上安装手动电压控制作为备份。
3.4 变频驱动设备的功率限制
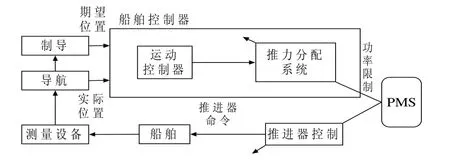
图3 PMS功率限制功能在推进器系统中的应用[10]
通常,船舶上的重型用电设备主要为推进器等变频驱动的设备[4,5,11,12],变频驱动在功率管理和控制方面具有高度的灵活性,能够在50到100毫秒内增加或减少功率消耗,例如电压源型逆变器的动态响应时间小于50毫秒,而可控硅整流器(SCR)、周波变频器和电流源逆变器的动态响应时间约100毫秒左右[5]。这样可以由PMS向重型用电设备的控制器发出速度或功率限制命令,限制重型用电设备的功率消耗,可有效预防发电机组过载而引起系统断电,PMS功率限制原理如图3所示。通常在下列三种基本下情况需要进行功率限制[13]:
稳态限制,总负载功率消耗超过总发电量;
瞬态限制,负载或电网结构突然改变;
重要负载的操作,在某些船舶上,推进器优于生活设备。
3.5 大功率用电设备启动许可
对于某些大功率电气设备,如:恒速电动机驱动的变距螺旋桨(CPP),电动机为鼠笼型感应电动机,没有通过变频器而直接接入电网。启动电流可达到额定值的 5~7倍,造成电网电压瞬时下降,并使电动机产生瞬时冲击力矩。
针对该类型的大功率电气设备,PMS具有负载堵塞或启动许可功能,也就是只有当PMS计算并判断电网具有足够的可用功率时,才同意该大功率电气设备的启动请求,否则,PMS将先依次启动备用发电机组,直到电网具有足够的可用功率后,PMS才响应该大功率电气设备的启动请求,该大功率电气设备才可以启动 。
3.6 电气设备的分级卸载
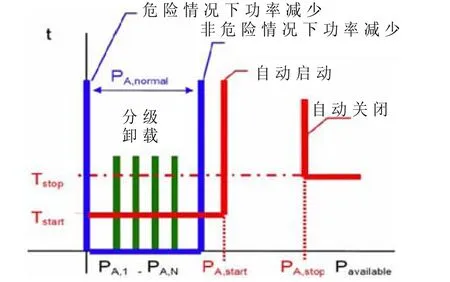
图4 发电机的自动启动/关闭与分级卸载
在实际运行中,如果电力系统出现的所有情况可以准确预测时,PMS所具有的发电机组自动启动、变频驱动的功率限制和大功率电气设备启动许可等功能可以保证船舶电网不发生断电危险,然而,由于船舶电力系统非常复杂,操作模式多样,电力系统出现的情况很难准确预测,当电网可用功率迅速减少时,如果电力系统没有卸载功能,有电力中断的危险。所以对于船舶电力系统,当可用功率降到预先设定的门限值时,PMS先按照预先制定的次序表依次启动相应备用发电机组[14],然后触发非重要负载的断路器,将它们分级从电网上脱扣,分级卸载的次序由负载的重要性而定,重要的用电设备只有在可用功率非常小时才从电网脱开[15,16],整个操作过程如图4所示。
3.7 快速卸载
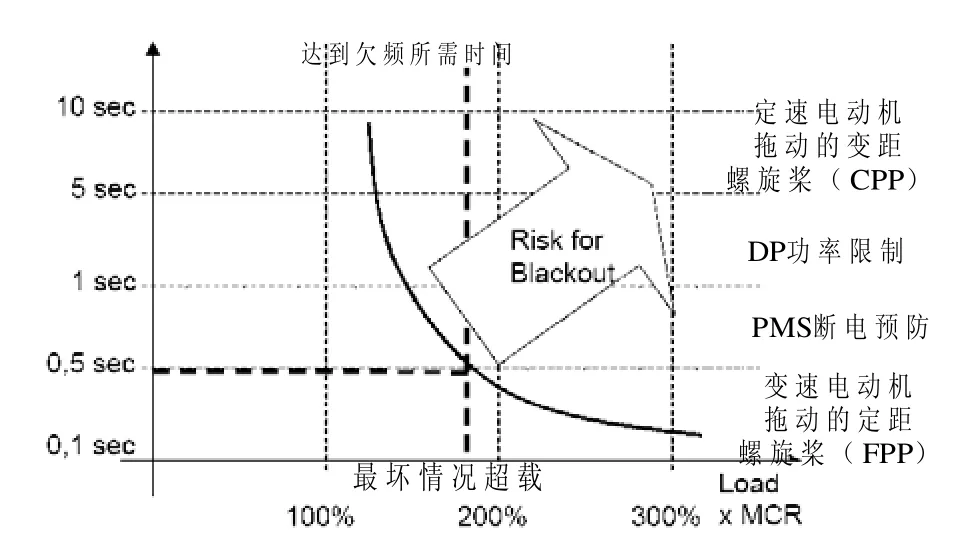
图5 功率减少所需调节时间 [16]
在船舶电力系统运行过程中,如果某一套发电机断路器发生跳闸现象,就会引起剩余并网发电机出现瞬时非常大的过载现象,这就要求PMS必须快速减少电力系统载荷,避免剩余发电机断路器跳闸而引起整个电网断电。由于要求电力系统保护响应的快速性,前面所述的启动备用发电机组、功率限制和分级卸载等功能均不能取得期望的效果,这就要求 PMS具有快速减少负载的功能。
由图5可以看出,当一个并网柴电机组脱扣时,另一个并网柴电机组在负载加倍的情况下,为了避免断电的危险,变频器驱动的推进器应当在300˜500毫秒内将功率减为零[4]。
当前,PMS快速减少负载方法分为[2]:基于可用功率的分级卸载方法、基于频率的分级卸载方法、基于事件触发算法的快速负载减少方法。其中,ABB公司的基于事件触发算法的作用过程为:当配电盘上的发电机断路器发生跳闸时,将产生触发信号,该触发信号通过线路传输到配电盘旁边的远程I/O单元,远程I/O单元通过现场总线迅速将这个信号传输到 PMS控制器(分布式PMS系统的分系统),然后,该信号在PMS中进行快速减少功率的运算,这期间的时间可以忽略。另外,快速减少载荷功能也通过位于发电机组旁边的远程I/O单元触发,两条触发线路见图6。
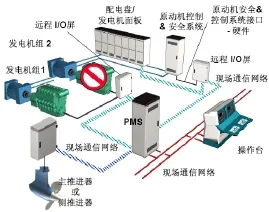
图6 基于事件触发的快速负载减少方法[2]
PMS执行减少推进器载荷的程序所需时间约为50毫秒,而PMS从接收触发信号到向变频器发出减少功率命令需要100毫秒,信号传输是通过现场总线完成的,变频器可在100毫秒内将其功耗降为零,而如果采用电压源逆变器,这个时间可以不超过 50毫秒。因此,整个功率减少过程所需的时间不超过200毫秒,如图5所示,小于500毫秒的要求。另外,在经过预先设定的时间之后,复位该触发信号,可以重新启动推进器。ABB公司通过大量的试验证明,在发电机断路器发生跳闸的情况下,采用该算法可以有效预防电力系统断电[5]。
另外,在实际电力系统设计过程中,还可根据电网负载具体情况设计负载功率减少方案,例如对于变速电动机拖动的定距螺旋桨(FPP),也可采用监视电网频率下降的FPBS方法快速减少推进器功率。而对于定速电动机拖动的变距螺旋桨(CPP),由于其响应较慢,因此,目前只能通过 PMS的分级卸载功能来减少电网的功率消耗。
3.8 断电恢复(Blackout Restoration)
如果船舶电力系统发生断电,PMS将自动恢复电力系统供电。如果没有 PMS,操作员将重新一套接一套地启动发电机组,与电网同步并接到电网,然后,手动或远程启动相关负载设备。由于这些设备的连接非常复杂,整个恢复过程大约需要几十分钟,而且在此过程中,由于船员紧张可能出现误操作。如果由 PMS来恢复供电,整个过程仅需要几分钟。
4 结束语
船舶 PMS是集人工经验、电力系统自动化和检测技术的综合,在船舶各种工况或作业条件下,可保证船舶电力系统具有足够可用功率。它主要完成发电系统、配电网络和负载的管理,对提高舰船电力系统的鲁棒性,减少燃料消耗,防止船舶电力系统断电具有重要作用。
[1]林安平. 船舶电力推进系统中PMSM模糊矢量控制仿真研究[D]. 大连海事大学, 2007.
[2]Lin Radan, D. Integrated control of marine electrical power systems[D], thesis for the degree of philosophiae doctor, Department of Marine Technology, NTNU, Norway, 2008.
[3]Project Guide for Marine applications, Marine Project Guide W20 - 2/2002.
[4]Ådnanes, A.K.,. Ing., MscEE. A Survey of concepts for electric propulsion in conventional and Ice breaking OSVs[C], 30th Propulsion & Emissions Conference 2008 Radisson SAS Hotel, Sweden,Gothenburg on 21-22 May 2008.
[5]Radan, D. Marine power plant control system- power/energy management system, Tech. Report,Department of Marine Technology, Project: Energy-Efficient All Electric Ship, NTNU, Trondheim,Norway, 2004.
[6]Radan, D., A.J. Sørensen, T.A. Johansen and Ådnanes,A.K.. Probability based generator commitment optimization in ship power system design[J], WSEAS Trans. on Systems, Issue 8, Vol. 5, pp. 1901-1907,2006
[7]Magnus Miemois,Power generation stability and response in DP applications –An Overview of Modern Diesel Engine Performance[C],Dynamic Positioning Conference, Huston, Finland,2003.
[8]Russell Hodge, Single point failures in traditional implementations of power and load management systems[C],Dynamic Positioning Conference,Huston, Finland,2003.
[9]Woodward Co.. Governing Fundamentals and Power Management, 2004.
[10]Ruth, E.. Propulsion control and thrust allocation on marine vessels[D]. Department of Marine Technology,Norwegian University of Science and Technology(NTNU), 2008.
[11]Ådnanes, A.K., Maritime electrical installations and diesel electric propulsion, Lecture Notes, Trondheim:Dept. Marine Technology, NTNU, Norway,2003.
[12]Ådnanes, A.K., Asgeir J. Sørensen, Thomas Hackman,Essential characteristics of electrical propulsion and thruster drives in DP vessels[C], Dynamic Positioning Conference, 1997.
[13]Don E. Wilkes, P.E.Power management and blackout protection[C],Dynamic Positioning Conference,Huston, US,2001.
[14]Radan, D., T.A. Johansen, A.J. Sørensen, A.K.Ådnanes , Optimization of load dependent start tables in marine power management systems with blackout prevention[J], WSEAS Trans. on Circuits and Systems , Issue 12, Vol. 4, pp. 1861-1867,2005.
[15]Power management systems brochure. Proeon Systems Limited ,2009.
[16]Lauvdal, T., Ådnanes, Å.K.. Power management system with fast acting load reduction for DP vessels[C]. Dynamic Positioning Conference, Huston,2000.