基于DSP6000的实验室安全控制系统研究
2011-06-29郑国刚丁海洋
郑国刚, 丁海洋
(1.上海辰锐信息科技公司北京分公司,北京100012;2.北京印刷学院,北京102600)
1 引言
针对基于DSP6000的实验室安全控制系统进行研究,即以TI的TMS320DM642为核心构建一个实验室安全控制系统。TMS320DM642主频600MHz,其最大处理能力可达到4800MIPS,采用两级缓存结构L1P、L1D、L2,最大外扩存储器1024MB,具有64个独立通道的EDMA[1]。
近年来随着经济的发展,很多实验室具有大量昂贵的设备,而实验室出入的人员较多,所以实验室的安全控制就显得尤其重要。王玉峰[2]描述了实验室频监控系统的组建与应用的思想;黄三伟[3]和吕阳伟[4]介绍了实验室监控系统的设计方案和实现思路;李玉峰[5]介绍了基于ARM的嵌入式视频监控系统的实现方案。以上重点介绍了实现思路和方案,但是实验验证较少。
以TMS320DM642为核心构建一个实验室安全控制系统,通过摄像机采集视频图像,将图像传输给DM642进行图像处理,包括获取背景图像、差影处理、图像分割、运动目标检测、安全控制,并将检测结果显示在液晶屏上。系统硬件组成框图如图1所示。
通过模拟摄像头采集得到PAL制电视模拟信号,经过A/D转换芯片SAA7115得到数字视频信号,传给DM642的视频接口,DM642对图像数据进行图像处理,完成印刷质量检测,输出的图像数据经过D/A转换芯片SAA7105转换成标准电视信号输出TV显示,而处理前后的数字图像数据都存储在SDRAM中。
系统的核心是在DM642上编程实现实验室安全控制系统,系统实现框图如图2所示。
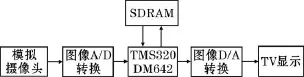
图1 实验室安全控制系统硬件组成框图
图像采集:通过镜头和CCD相机采集实验室环境中的彩色视频图像。获取背景:从视频序列图像中,获取一帧图像作为背景图像。差影处理:将当前采集的前景图像与背景图像进行差影处理,对差影后的图像进行图像平滑和图像分割,得到分割后的图像。运动目标检测:在分割后的图像中,结合投影法进行运动目标检测,检测当前是否有运动目标,如果有,获取该目标的位置。安全控制:在当前帧图像中,标出运动目标位置,存储该帧图像,并可以根据需要进行其他安全控制,如:发出警报、闪烁红灯、存储文件等。

图2 实验室安全控制算法实现框图
2 获取背景及差影处理
在实验室环境中,当摄像机的位置和角度固定后,当采集区域内没有运动目标时,摄像机采集的图像应该是基本没有变化的,所以主要以差影法为核心,进行安全控制,即先采集一幅机房中常态下的图像作为背景图像。所谓常态下的图像,即机房中无人的情况下,平时正常的图像;所谓安全控制,主要是检测采集区域内是否有人的出现,即将采集的图像与背景图像进行差影法处理,并进行运动目标检测,根据检测的结果,进行相应的安全控制。
在开始采集图像后,固定摄像机的位置和角度,采集下一个合适条件下的图像,作为背景图像,保存起来,图3为实验室环境中的背景图像。
2.1 差影法
差影法,即图像的相减运算,是指把同一景物在不同时间拍摄的图像相减[6],差值图像提供了图像间的差异信息,能用以指导动态检测、运动目标检测和跟踪、图像背景消除及目标识别等工作。文中采用不同时间拍摄的背景图像和前景图像进行差影法处理。实时采集得到检测图像,如图4所示。将检测图像与背景图像进行差影处理。

图3 实验室背景图像

另外,要进行差影处理一定要保证摄取的背景图像和手势图像时,摄像机的位置和角度不变,如果摄像机位置或角度发生变化,则要重新摄取背景图像。
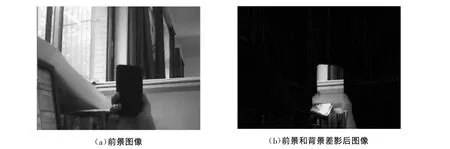
图4 差影法图像
2.2 图像平滑
对差影处理后的图像,为了减少噪声点的干扰,需要先进行图像平滑处理,再进行图像分割,最常用的图像平滑方法,即邻域平均法。这种方法的主要思想是用几个像素灰度的平均值来代替每个像素的灰度。假定有一幅N×N个像素的图像f(x,y),平滑处理后得到一幅图像g(x,y)。

式中 x,y=0,1,2,…,N-1,S是(x,y)点邻域中点的坐标的集合,M是集合内坐标点的总数。上式说明平滑化的图像g(x,y)中的每个像素的灰度值均由包含在集合S中的f(x,y)的几个像素的灰度值的平均值来决定。集合S通常有四邻域和八邻域,四邻域表示为:

八邻域表示为:

论文采用八邻域的图像平滑算法,即采用一个3×3模板对图像中每个像素(边界点除外)进行平滑,将像素及其八邻域的各像素像素值求和,再取平均值代替该像素原像素值。

图5 3×3平滑模板
2.3 阈值分割
阈值分割的基本思想是找到一个阈值,使按照这个阈值划分目标和背景区域的错误概率最小。设图像种感兴趣的目标的像素点灰度为正态分布,密度为P1(c),均值和方差为 μ1和 σ21,设背景点的灰度也作正态分布,密度为P2(c),均值和方差为 μ2和σ22,换言之,整个密度函数可看作是两个单峰密度函数的混合,如图6所示。
设目标的像素点数占图像总点数的百分比为Q,背景点占(1-Q),当选定门限为 T时,目标点错划为背景点的概率

当错误概率最小时,这时的T就是最佳阈值。
对于图像平滑后的图像进行灰度阈值分割,由于此时的图像为彩色图像,所以要先将其转换为灰度图像。

对其进行灰度阈值分割,

其中 Tc为对差影后图像进行分割的阈值。
差影法后进行阈值分割的结果如图7所示。
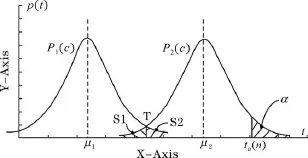
图6 目标点和背景点的灰度分布

图7 差影法分割后的结果
3 运行目标检测
运动目标检测的目的,主要是检测图像中是否存在人的运动,而一个正常人在平面图像中,总是具有一定的宽度和高度,这些都需要在分割后的图像中,通过算法检测前景目标的参数,而首先需要进行投影法处理。
3.1 投影法
投影法有中心投影法和平行投影法。假设投影线有一点出发,将空间形体表现在投影平面上的方法,称为中心投影法。平行投影法也可以看作中心投影法的一种特殊情况,既当投影中心位于无穷远时,则所有投影线为互相平行,此时所得的投影就是平行投影。平行投影法中包括正投影和斜投影两部分。正投影:当诸投影线相互平行,并与投影平面垂直相交。斜投影:当诸投影线互相平行,并与投影平面呈倾斜相交。正投影,包括水平投影和垂直投影。
这里主要采用垂直投影,将分割后的图像通过垂直投影得到一个一维向量L,该向量L的数据分布如图8所示。
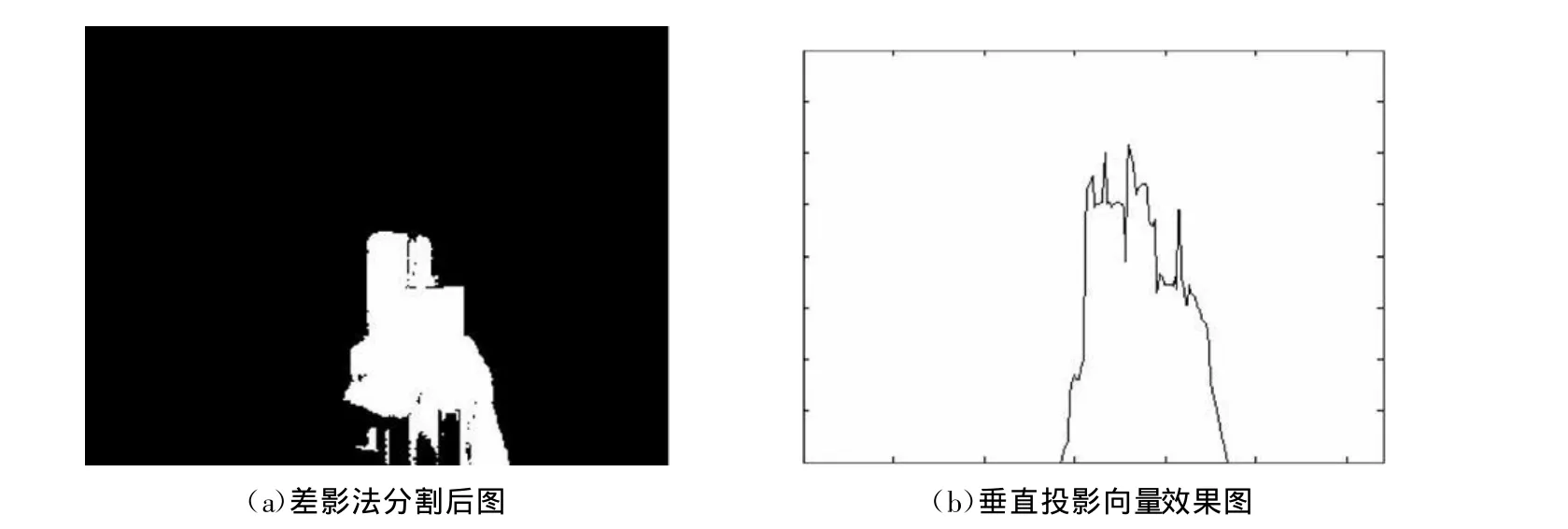
图8 投影法图像
3.2 检测运动目标
为检测运动目标的宽度和高度,可针对投影法得到一维向量 L进行相应处理,包括:最大值判别、连续区域判别、区域内点数判别,从而实现运动目标的检测。
(1)最大值判别
首先获取一维向量L的最大值Lmax和对应位置 xmax,如果该运动目标满足一定的高度,则最大值 Lmax一定满足公式(8)的要求,其中 TH表示运动目标高度的最低要求,如果满足,则进行后面的处理。

(2)连续区域判别
一个运动目标必然会在一个连续的区域内有效,即在这个区域内,投影的数值大于一定的要求,为了保证这个区域的连续性,以最大值Lmax为中心,向两侧获取连续区域的范围(xl,xr),

为了保证运动目标的宽度,需要连续区域满足,

其中,TW表示运动目标宽度的最低要求
(3)判决范围内的点数

按照公式(11)统计有效区域内的点数n,如果n满足公式(12)的要求,则表示当前图像中存在运动目标,其中,TS表示运动目标面积方面的要求,该运动目标的中心为((xl+xr)/2,Lmax/2)
3.3 安全控制
当检测到运动目标后,可根据需要进行必要的安全控制:
(1)将当前的图像进行存储,并且在记录文件中进行记录,这样方便后期的检测,避免在整个视频图像中,进行人工的查找
(2)通过一些输出设备进行输出显示,如:红灯闪烁、响警铃等。
4 实验效果
系统在PC机上使用CCS 6000开发环境进行开发,检测系统以TMS320DM642为主处理芯片构建开发板,使用摄像头采集视频,在TFT-LCD真彩液晶显示器显示视频,将开发的检测程序下载到DM642的开发系统上独立运行。在作者实验室进行实验,实验效果如图9所示。其中图(a)为采集的背景图像;图(b)为当前检测的前景图像;图(c)为前景与背景差影后的图像;图(d)为分割后的图像,其中分割阈值 Tc选择为30;图(e)和图(f)为进行运动目标检测的结果图,图(e)为在分割后的图像中标出运动目标的图像,图(f)为在前景图像中标出运动目标的图像,其中,运动目标的高度阈值 TH选择为80,宽度阈值 TW选择为40,面积阈值 TS选择为3200。
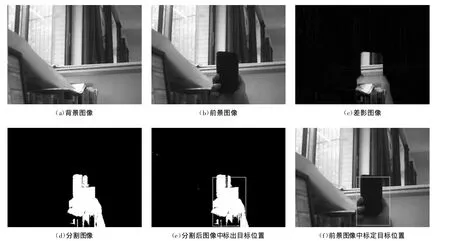
图9 安全控制系统效果图
5 结束语
以TMS320DM642为核心构建一个实验室安全控制系统,通过摄像机采集视频图像,将图像传输给DM642进行图像处理,包括获取背景图像、差影处理、图像分割、运动目标检测、安全控制,并将检测结果显示在液晶屏上。经过实验验证,系统能够实现实验室条件下的安全控制。
[1]Texas Instruments.TMS320DM642Video/Imaging Fixed-Point Digital Signal Processor[C].Texas Instruments Incorporated,2010.
[2]王玉峰.实验室数字视频监控系统的组建与应用[J].科技信息,2010(11):465.
[3]黄三伟,周熠.基于校园网的实验室安全监控系统[J].实验技术与管理,2007(9):78-81.
[4]吕阳伟,王娜,陈鹏.数字视频监控实验室监控系统设计[J].低压电器,2007(22):26-28,67.
[5]李玉峰,莫玉龙.嵌入式数字视频监控系统的实现[J].上海大学学报:自然科学版,2004(5):467-470.
[6]何斌,马天予.Visual c++数字图像处理[M].北京:人民邮电出版社,2001:459-477.
