永磁无刷电动机在自动排线系统中的应用
2011-06-19周有立
周有立
(温州职业技术学院,浙江温州325035)
0 引 言
自动排线在电线的卷取、纺织工业中纱锭、纤维的绕制等应用方面非常广泛。一般绕线机是由放线系统、绕线系统、排线系统组成。要求被绕物以恒线速、恒张力卷取,而排线系统实现的目的是将被绕物按一定的间隙有规律、无重叠地排列。
传统的自动排线电机使用有刷直流伺服电动机,机械换向器和电刷会引起诸多问题。碳刷及整流子在电机转动时会产生火花,碳粉因此除了会造成组件损坏之外,使用场合也受到限制。也有人从实现开环无误差跟随结构、编程控制简易等方面考虑选用步进电动机,但定位精度不高且易受影响。因为定位精度主要靠步进电动机的步距精度和传动机构精度维持,而定位系统本身的精度误差、机械磨损、温度热膨胀效应以及外界振动因素的影响,将会产生严重偏道现象,由于输出未设置位置反馈信号,一旦严重偏道发生,定位系统是无能为力的。永磁无刷直流电动机具有响应快速、效率高、寿命长、转动惯量低、起动转矩较大、从零转速至额定转速具备可提供额定转矩的性能,非常适合自动排线。
本文介绍了电缆厂家设计电线产线分盘机。分盘机是将大盘的线材按一定的长度收到小盘上并精密排列,如图1所示。以NXP半导体公司LPC3250系列芯片控制核心,以永磁直流电动机为执行机构。绕线电机与排线电机根据设定线径配合运动。采用编码器反馈,双闭环PI控制。
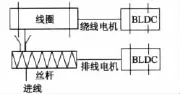
图1 排线结构图
1 自动排线系统执行机构的硬件结构
随着电子电路以及大规模集成电路发展,ARM微处理器以及技术的应用已经渗透到工业控制各个领域。为开发自动排线系统提供了硬件基础。自动排线系统硬件结构如图2所示,控制芯片采用NXP公司LPC3250系列芯片,该芯片适用于要求高性能和低功耗结合的嵌入式应用中。片内集成了丰富的电机控制部件(事件管理器、PWM产生电路、ADC转换模块等),为实现无刷直流电动机控制提供了极大方便。
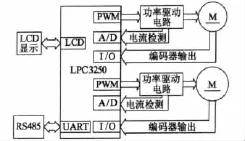
图2 系统硬件结构图
硬件上放弃了以前传统IGBT以及驱动电路,执行器逆变电路采用智能功率模块(IPM)。IPM内部集成了逻辑、控制、检测和保护电路,使用方便,不仅减少了系统的体积,缩短了开发时间,也增强了系统的可靠性,适应了当今功率器件的发展方向。系统选用110ZW型电动机,其输入电压为300 V,额定电流4.2 A,额定转速2 000 r/min。PS21265型IPM智能功率模块,其额定电流20 A,额定电压600 V。由于目前无刷直流电动机无位置传感器控制技术或者利用霍尔换向元件的输出实现调节的伺服控制系统,只能把速度调节到设定速度的±1% ~5%。本系统采用旋转增量式编码器,一周A、B相输出500个脉冲,可利用90°相位差的A、B两路信号进行倍频,根据上升和下降沿分辨率达2 000,每转输出一个Z相脉冲以代表零位参考位。
2 自动排线系统执行机构软件设计
自动排线系统需要丝杆来回移动,这需要电机频繁正、反转的运动传动系统,为提高起动、制动、换向响应时间,采用速度和电流双闭环系统。PID控制器作为经典控制理论中的线性调节器在实际应用中发挥着重要作用,其通过调节可以使被控量无静差地跟随设定值。而在电机的控制器中,为了避免实际输出值中谐波噪声的影响,一般不加入微分环节,只采用PI控制器。本系统采用如图3所示的调速系统。
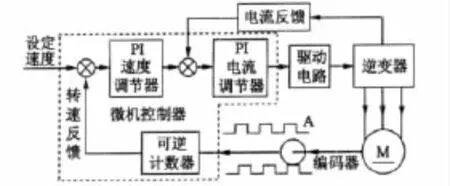
图3 微机控制双闭环直流调速系统原理框图
直流电动机的数学模型计算是直流调速系统设计的重要环节,这里利用传统方法,根据直流电动机的电气方程和机械特性方程求得直流电动机的数学模型。
采用PI调节器,把电流环校正成典型Ⅰ型系统:

按照典型Ⅱ型系统的设计要求把速度设计成典型Ⅱ型:

经校正后的自动排线系统如图4所示。

图4 自动排线系统动态结构框图
Matlab/Simulink仿真结果如图5所示。超调44%,调节时间ts=0.5 s(误差2%)。
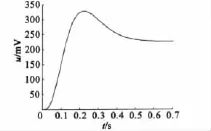
图5 单位阶跃响应曲线图
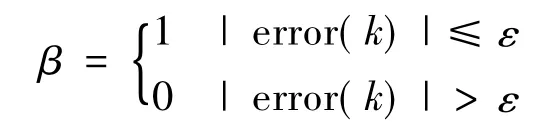
通过电流环和转速环的设计,系统已经具有了良好的稳态和动态性能。但是这种双闭环系统的不足之处也是显而易见的,转速必然超调,对系统会冲击,影响绕线质量。积分分离PI算法控制策略能抑制甚至彻底消除超调,既保证系统调整时间短,又使系统的超调减小。本系统采用传统双闭环设计,再通过Matlab仿真,达到预期的初步目的,再利用数字积分分离PI通过现场调试,实现并达到如下的响应曲线,如图6所示。积分分离式PI算法如下:当被控量与设定值偏差较大时,取消积分作用,避免了由于积分作用造成系统稳定性降低、超调量增大的不利影响;当被控量接近给定值时,引入积分控制,从而消除静差,提高控制精度。积分分离式PI形式如下:
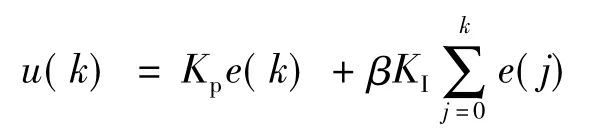
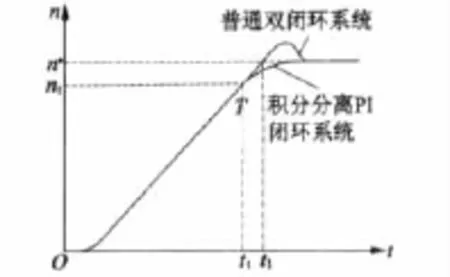
图6 积分分离PI起动曲线图
式中:β为积分项分离开关系数,
将实时操作系统μC/OS-II移植到LPC3250系统之后,应用程序设计就变得比较容易了。尽管自动排线系统的任务比较繁多,功能比较强大,但我们可以将比较复杂的任务模块化,按照功能划分为多个任务,各个任务可以分别编写模块程序,模块化程序更容易开发与升级。无刷直流电动机的控制系统的软件设计主要由如下几部分构成:ARM各个事件管理器初始化程序、电机控制PWM模块、闭环换向调节程序、中断服务程序、电流环以及速度环调节程序。LPC3250的初始化主要完成系统时钟、看门狗、I/O端口、系统中断、各个控制寄存器及其中断的设置,以及软件中各变量的初始化和辅助寄存器的设置等功能。闭环换向调节程序由LPC3250负责根据编码器采集到的信号,根据编码器算法对电机进行换向调节。中断服务程序的作用是根据定时器的溢出中断而产生ADC采样。而ADC中断主要负责实时获取电流采集信号A/D转换结果,为LPC3250提供所需电流数据。电流环以及速度环调节根据采样周期ΔT为间隔,对反馈电流和用编码器反馈速度进行数字积分分离式PI计算,再经PWM输出量进行控制。按照任务的重要性和系统响应对时间的要求分配优先级,对时间要求高的分配级数低,任务优先级越高。
3 结 语
我们利用经典双闭环成熟经验加嵌入式数字积分分离PI的调节器,开发周期短,借鉴资料多,开发的实用的自动排线绕线机,低速力矩大,运行平稳,调速比宽整机传动平稳、排线整齐、噪声小、计数准确。排线系统处理器采用嵌入式ARM9控制,操作采用触摸人机界面控制操作方便灵活。经实际使用,反映良好,具有良好的应用价值及前景。
[1]桂文斌.基于DSP的电机双闭环控制系统[J].工业控制计算机,2010,23(1):41-44.
[2]拉伯罗斯.嵌入式实时操作系统μC/OS-II(第二版)[M].邵贝贝,译.北京:北京航空航天大学出版社,2003.
[3]周立功.ARM嵌入式系统基础教程[M].北京:北京航空航天大学出版社,2005.
[4]梁霭明,马平,陈爱民,等.永磁直流直线电机的双闭环调速系统的设计与研究[J].机床与液压,2010(2):18-20,53.
[5]李瑛瑛.双闭环直流调速系统[J].装备制造技术,2009(1):70-72.
[6]李仁定.电机的微机控制[M].北京:机械工业出版社,1999.
