基于多传感器智能小车的设计与研究
2011-06-13朱晓波岳大军张广志
朱晓波,岳大军,张广志
(1.湖南农业大学工学院,湖南长沙410128;2.郴州职业技术学院,湖南 郴州423000)
0 引言
智能小车在移动式机器人中占有很重要的地位,也是人们在控制领域中非常感兴趣的实验平台,在此平台上可以搭建传感器来实现更多的功能。机器人研究受到越来越多人的关注,它是计算机控制与电子计算的融合,集传感器探测(光源、障碍物)、处理器自动控制、电机调速等于一体,可以说是计算机、传感器、信息、通讯、导航、人工智能及自动控制等技术的一个综合体,为电子设备智能化提供了很好的实例[1]。从检索的文献[2,3,4]来看,现有智能小车大多都是以实现特定功能而设计的,不适合功能扩展。本文根据现在社会的需求,设计了一种集多种传感器于一体的实验性质的智能小车,基本可以满足嵌入式初学者的需求。
1 系统总体设计
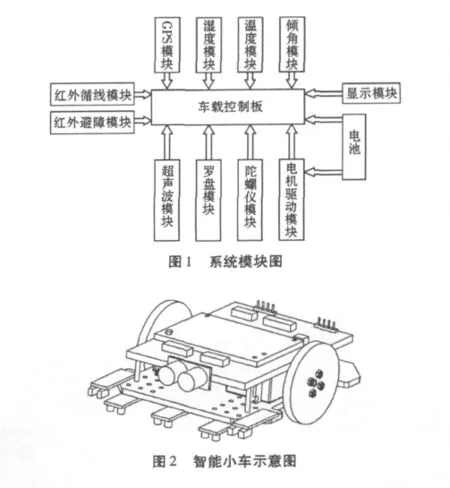
系统总体方框图如图1所示,智能小车的控制核心可以是基本的8位单片机、16位单片机和以ARM处理器为核心的单片机等。在小车的平台上只要加一个转接板,就能够实现多种单片机的兼容,降低了学习者的成本。车载控制板包括系统所需的基本部分,如显示部分、按键部分、DC-DC电源、实时时钟、流水灯和红外接收等部分。系统板上可以扩展配套的串口输出的模块,通过软件协议实现传感器与控制核心的通讯,软件协议还保证了传感器通讯互不干涉。
2 系统硬件
基于多传感器的智能小车主要由电源模块、显示模块、按键和传感器等组成。智能小车平台上能够兼容多种传感器,以实现多种功能,满足使用者的多样化需求。
2.1 系统平台
智能小车平面示意图如图2所示,智能小车采用前轮驱动,后轮是一个万向轮,左右前轮各用一个电机驱动,电机可以是直流减速电机、360°舵机和步进电机,在控制板上都为其预留了接口。在小车的前部安装五个红外反射式传感器,其中3个为红外循线传感器,2个为红外避障传感器。红外循线传感器可以识别黑线白底的线路或白线黑底线路,红外避障传感器可以检测到近距离的障碍物。另外在小车的前部安装一个超声波传感器,用来探测障碍物的距离,而超声波测距有一定的盲区,故而要和红外避障传感器结合,以达到精确避障,因而在小车的左右两边也分别装有超声波传感器和红外避障传感器。在车载控制板还可以同时装有温度模块、湿度模块、倾角模块、罗盘模块、陀螺模块等模块,以实现多传感器融合。
2.2 传感器模块
2.2.1 陀螺仪模块
智能小车配套的陀螺仪模块型号为BQ-TLY-86-TTL,是一款低成本高精度的角速度陀螺仪模块。其工作原理是将模块旋转时音叉震荡产生的地球偏转力(克里奥利力)转换为电信号并经过算法处理而获得被测物体的角速度。该模块以UART的方式与上位机进行通信。该产品运行稳定,输出波特率可调,有连续输出和询问输出两种工作模式,可适应不同的工作环境。
2.2.2 倾角传感器模块
倾角传感器模块型号为BQ-2XN-232,是一块低成本的双轴倾角传感模块,精确测量角度范围为正负45°(测量范围可以扩展到60°),其以RS232的方式与外部处理器进行半双工通讯,波特率可选,具有零点设定、响应频率调整等功能。
2.2.3 罗盘模块
电子罗盘模块型号为BQ-CA81-TTL,是一款体积小、成本低的平面数字罗盘模块。其工作原理是通过磁阻传感器感应地球磁场的磁分量,从而得出方位角度。该罗盘以TTL的方式与上位机进行通讯,模块的精度高,运行稳定,并具有标定功能及安装角和磁偏角补偿功能,可以适应不同的工作环境。
3 通讯模式
在智能小车中下挂的传感器基本上采用两种通讯模式。一种是通过模拟选通开关对串口进行扩展,以扫描的方式进行循环问答,如图3所示。另一种是把所有的传感器并联在串口上,以软件通讯协议对传感器进行扫描通讯,如图4所示。软件通讯协议是各传感器与传感器之间的数据互不干扰的保证,为此制定表1所示的软件通讯协议标准。

图3 串口扩展通讯模式
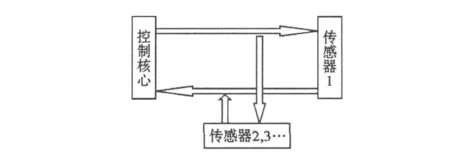
图4 软件通讯协议串口通讯模式

表1 软件通讯协议标准
模块地址:为传感器模块地址
Sum:校验和
4 总结
传统的智能小车系统以常见的单片机为核心,辅以较简单的元器件和电路设计,在完成基本的循迹和避障功能的前提下,又要考虑到外观、成本等问题[5],厚此薄彼,小车的可扩展性就变得相对较差。因此在本设计中,作者充分考虑到了这个问题,在电路中增加了DC-DC开关电源部分并预留了所有配套的传感器模块接口,可以满足某些比赛的要求,而且本设计产品通过一段时间的试销,市场反应较好,值得一试。
[1]王松,李永超,郑建飞.基于AT89S52单片机的智能小车系统设计制作[J].硅谷,2010(18):75-76.
[2]史洪宇.基于单片机的多功能智能小车的设计[J].仪表与技术,2010(12):16-17.
[3]杨桂林.基于AT89S51的智能小车的设计[J].单片机开发与应用,2010(26):124-125.
[4]姚培,张李坚,周晶香.基于单片机控制的智能寻迹避障小车[J].机电信息,2010(12):192-193.
[5]安岩.自动循迹智能小车的设计[J].苏州科技学院学报(工程技术版),2010(1):72-73.