基于SIFT特征的目标跟踪算法鲁棒性研究
2011-06-12刘宏申张传文
刘宏申 张传文
安徽工业大学计算机学院 安徽 243032
0 引言
本文提出了基于改进的 SIFT特征的多目标稳定跟踪算法。SIFT算法的特征点描述子的生成占去了算法处理的大部分时间,不能很好的满足实时性。实验证明,该算法对多目标跟踪能够保持稳定性,使误差减少,解决了非刚性目标跟踪时的问题,提高了容错性、鲁棒性。
1 运动目标检测
本文提出了一种利用帧间差分信息提取背景的方法,算法的思想如下:用近期的非运动像素作为背景,对运动区域的像素使用前一时刻的背景像素的值代替,当背景构建完成(用30帧来建立背景图像),用背景减除法分来割出运动前景图。
设I(x,y,t)为第t帧(x,y)处的像素值,D(x,y,t)为差分图像,B(x,y,t)即为要构成的背景图像,则差分图像可以表示为:

由于噪声的影响,对检测得到差分图像先进行膨胀,再进行二值化处理,从而得到二值化图像:

其中 T1为二值化阀值。经过处理,在二值化图像中运动区域为 1,非运动区域为 0。对二值化后的前景图像进行检测,对较大的二值化团块做最小外接矩阵运算。并将运动变化的区域标定出来,并将矩阵区域内所有像素都置 1,处理后的二值图像结合当前帧图像对背景进行更新,更新模型表示为:
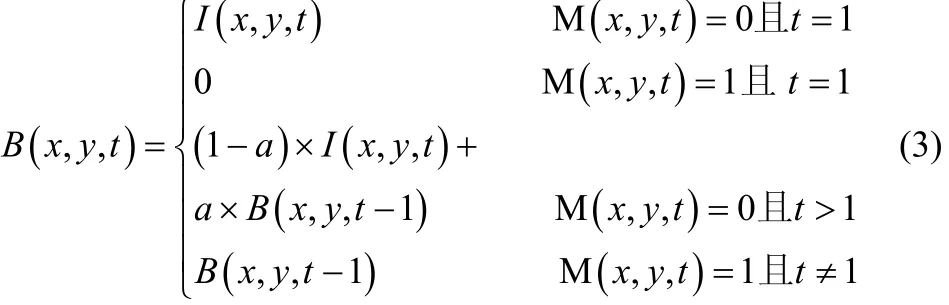
a为遗忘因子;对a调节来控制图像非运动区域跟新的快慢。当a接近1时,对光线的敏感度影响较小,更新的非运动区域与上一时刻帧的相关性较大,背景能够很快适应光线的变化,可以消除受到光线变化的影响,弥补了背景减除法的不足。其步骤如图1所示。
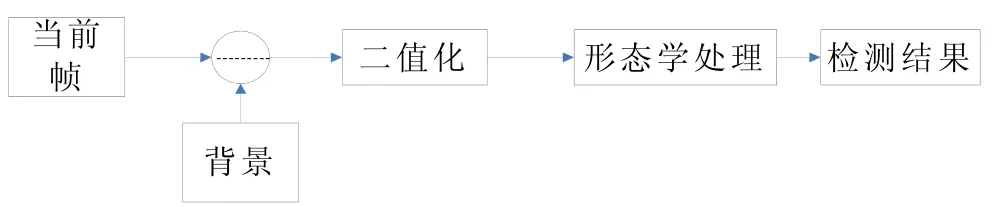
图1 背景减除法流程
2 运动目标跟踪
目标跟踪简单来说就是确定目标是不是在当前帧相应的位置出现。比较典型的特征提取算法有 Harris算法、SUSAN算法等,但这些算法对于物体的形变往往无能为力,而 SIFT算法对图像的缩放、旋转等形变都具有很好的适用性,但是 SIFT算法的特征点描述子生成占去算法的大量时间,影响了实时性,本文运用的改进的 SIFT算法就是针对与特征点描述子进行改进,从而减少了算法的时间,增强了实时性。
2.1 SIFT的特征提取理论
SIFT特征算法由Lowe提出,SIFT特征点对于图像的尺度和旋转保持不变性,对光照的变化也能保持一定的稳定性。高斯卷积核实现尺度变换的惟一线形核,二维图像的尺度空间定义为:

其中,(x,y)是空间坐标;σ代表尺度坐标,图像被平滑的少,相应的坐标也就小。对于高斯卷积核,大尺度对应概貌特征,小尺度对应细节特征。
为了有效的检测到稳定的关键特征点,提出了 DOG(Difference-of-Gaussian)。DOG算子定义为两个不同尺度的高斯核差分,如下表示:
新的道德公共物品,需要由道德文化构建的新乡情进行制度改造。它是一种特殊层次的情感,是维系社会组织中人际关系的桥梁。缺少情感的维系,人只是社会组织中孤立的个体,不会存在什么信任、友爱、帮助,也就不会有道德世界中的善。新乡情的培育可以使道德认知直接外化为道德行为,从而真正做到知行合一。道德情感被唤醒,并被进一步发展成为道德执着,道德其实就是人们内心自愿遵循的秩序。当这种秩序进行了自我更新,不仅可以消解道德焦虑产生的精神困扰,甚至有可能将这种消极的道德焦虑转化为积极的道德情感,从而使道德情感在维系道德秩序和伦理功能方面发挥着更为重要的作用。

二维高斯函数为

式中σ是高斯正态分布的均方差,即为空间尺度因子。
将检测得到的运动目标图像进行 SIFT特征提取,按标号来存储目标快生成的特征向量。为了增强匹配的稳定性,对每个关键点使用4×4共16种子点来描述,从而对每一个关键点形成128维的SIFT特征向量。
2.2 改进的SIFT算法
首先,在 SIFT 算法中运用了高斯模糊的方法,高斯模糊生成的曲面等高线是从关键点开始的成高斯分布的同心圆。所以距离关键点比较近的点对关键描述子的生成影响比较大,将原来的矩形区域划分以关键点为圆心的同心圆区域代替,即可省去高斯的模糊步骤。
其次,SIFT算法在生成描述子前需要旋转邻域,使关键点的方向为0
0,这样才能保证旋转的不变性。而圆形具有很好的旋转不变性,所以改进的 SIFT算法可以省去邻域角度归0的步骤。新的描述子构造方法如下:
(1) 将半径为8的圆心邻域分为4个同心圆,如图2。
(3) 对象量进行排序,保证旋转不变性。
(4) 进行归一化处理,以减少光照的影响。设'D是特征点描述子,则D'=(d1',d2',...,d40'),归一化的公示为:
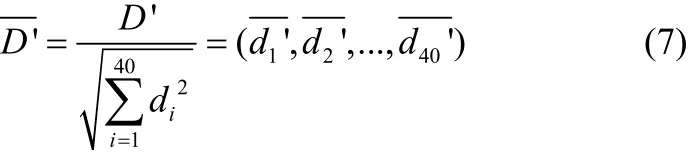
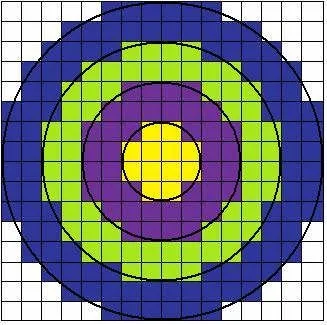
图2 改进算子邻域的划分
2.3 基于累计特征的跟踪算法
本文用利用帧间差分信息提取背景,对非运动区域进行更新,对运动目标移动遗留下来的区域用前一帧的像素值进行更新。根据帧间差分法的特性,背景能够很快适应光线的变化。当最小外界矩阵运算完毕后对背景进行更新。实验表明该方法降低了计算的复杂度,同时也具有较好的鲁棒性。
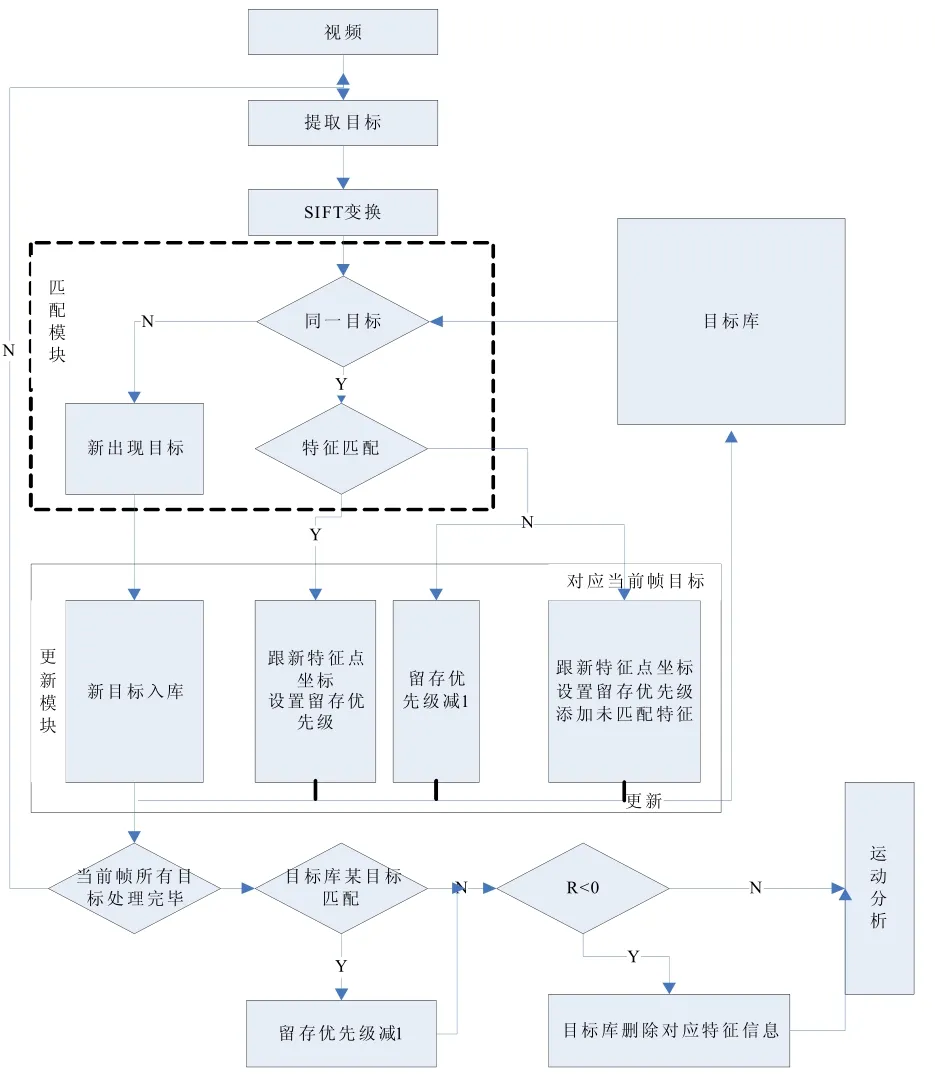
图3 改进算子邻域的划分
在跟踪过程中本实验是利用改进的 SIFT算法进行特征的提取,其同心圆的维度选为12,利用留存优先级对目标进行判别跟踪。其过程可以分为两个部分:目标的匹配和目标库的更新。其中匹配过程又分为点到点的特征向量匹配和根据点到点的匹配进行的目标物体的匹配。更新过程是对目标库里的特征根据留存优先级决定其淘汰还是保留。
3 实验结果及分析
(1) 用本文的算法对视频进行人体的跟踪,实验证明该算法对人体的旋转变化时有良好的跟踪效果。由于本文引入留存优先级使得就算是在人的下蹲情况下和人被短暂的遮挡情况下都具有良好的效果。实验对非刚性目标采用 1800转体(如图 4所示),在转体过程中,算法不断对历史特性进行更新,实验结果表明算法对形变具有较高的鲁棒性。
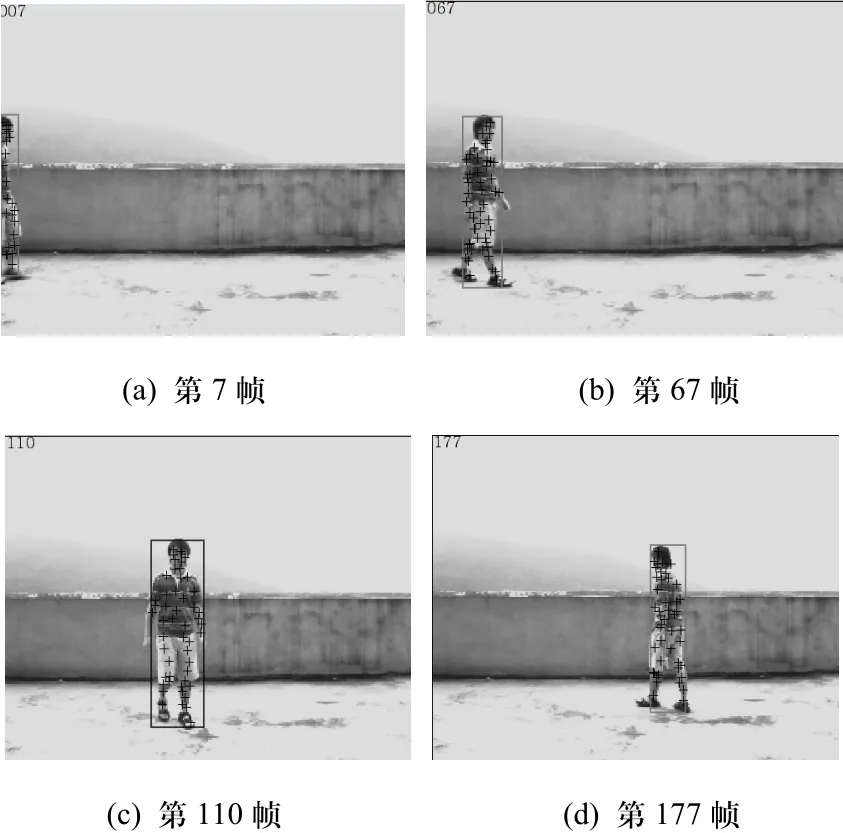
图4 算法在目标形变的条件下的跟踪效果图
(2) 算法对多目标关联的鲁棒性
图5中,图(a)为跟踪结果,图(b)为原始帧,图(c)为背景。对一段视频进行本文跟踪算法处理,得到表1结果。


图5 本文算法对多个目标的跟踪效果
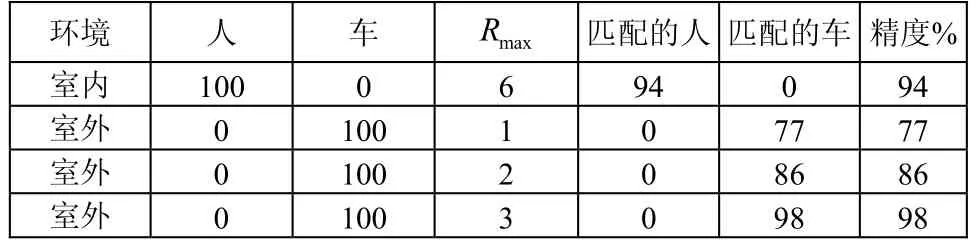
表1 算法在不同场景下目标跟踪的匹配结果
由表1可知,算法对多目标匹配关联稳定,当maxR(留存优先级)值为3时,对刚性目标识别的精度在95%以上,由于非刚性形变在移动过程中特征发生改变,要稳定跟踪目标,需要保留的帧信息较多,本文设为6时跟踪的精度才达到94%。
4 结束语
针对视频序列中跟踪的难点,本文用改进的 SIFT算法进行目标跟踪。改进的 SIFT主要是改进特征描述子,提了SIFT的算法实时性。并且结合帧间差分法是想了目标跟踪系统,系统中还运动了目标可的留存优先级法。对目标的遮挡,形变都具有很好的效果。实验得出此方法提高了系统的运行速度,提高了系统的实时性及鲁棒性。
[1]马颂德,张正友.计算机视觉---计算机理论与算法基础[M].北京:科学出版社.1997.
[2]朱胜利.Mean Shift及相关算法在视频跟踪中的研究[D].杭州:浙江大学.2006.
[3]秦先祥,陈华.运动目标识别与跟踪的模板匹配算法改进及仿真研究[J].广西科学院学报.2008.
