无刷直流电机双闭环串级控制系统仿真研究
2011-06-09吕伟鹏
吕伟鹏
(盐城师范学院 江苏 盐城 224002)
现代高磁能积和高矫顽力永磁材料的发展使永磁电机具备了高效率、长寿命、体积小、重量轻、结构简单等一系列优点[1]。永磁无刷直流电机因其卓越的性能和不可替代的技术优势倍受人们的关注。特别是自70年代后期以来伴随着永磁材料技术、计算机及控制技术等支撑技术的快速发展及微电机制造工艺水平的不断提高,永磁无刷直流电动机在高性能中、小伺服驱动领域获得广泛应用并日趋占据主导地位[2]。一直以来,研究人员都比较关注利用Matlab进行BLDC建模仿真的方法,并且也提出了很多的建模仿真方案[3]。例如有研究人员提出采用节点电流法对电机控制系统进行分析,通过列写m函数,建立BLDC控制系统仿真模型,这种方法实质上是一种整体建模的方法,其缺点是由于在一个整体模型的基础上修改控制算法或建立复杂控制系统会显得很不方便[4]。
本方案在Matlab6.5的Simulink环境下利用SimPower-System Toolbox2.3提供的丰富的模块库,基于BLDCM数学模型的分析,提出了一种简化的BLDC控制系统建模方法,在Matlab/Simulink中建立独立的功能模块,并对这些功能模块进行有机整合,搭建出无刷直流电机系统的仿真模型。
1 BLDCM的数学模型
对于表面安装式无刷直流电机,忽略电枢反应对反电势的影响,并结合前面关于无刷直流电机等效电路的分析,可以得到无刷直流电机电枢绕组及逆变桥的等效电路图[5]如图1所示。

图1 电枢绕组及逆变桥电路Fig.1 Circuit of armature winding and inverter bridge
从上面无刷直流电机的等效电路容易得出,三相绕组的电压方程为:

式中,uA、uB、uC分别为定子三相绕组端电压;iA、iB、iC分别为定子三相绕组相电流;eA、eB、eC分别为定子三相绕组每相反电势;r为定子每相绕组的内阻;L为定子每相绕组自感;M为定子两相绕组之间的互感[6]。
假设磁路不饱和,不计涡流和磁滞损耗,三相绕组对称,外加直流恒压电源,rA=rB=rC=r,LA=LB=LC=L,MAB=MAC=MBA=MBC=MCA=MCB=M。三相绕组采用星形接法,于是三相绕组的电流之和等于0,即iA+iB+iC=0,则上述方程可简化为:

2 仿真模型的建立
图1为仿真系统的设计框图。整个系统包括BLDC本体模块、参考电流模块、电流滞环控制模块、速度控制模块、电压逆变模块和转矩计算模块。
如图2所示,BLDC建模仿真系统的控制方案为双闭环控制,其电流环由电流滞环跟随调节器构成,而速度环采用PI调节器。并且根据模块化建模的思想建立了BLDCM控制系统的仿真模型,下面对各功能模块作如下介绍分析。
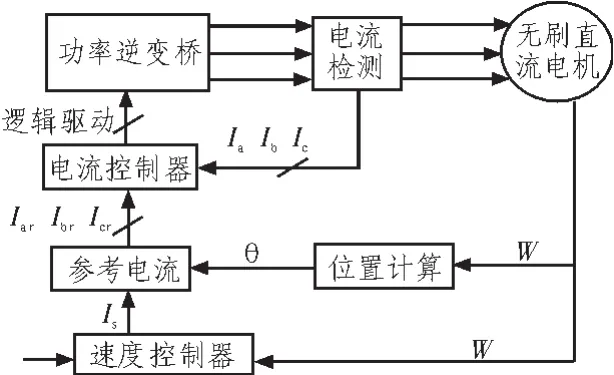
图2 无刷直流电机MATLAB仿真结构Fig.2 Simulation structure of BLDCM
2.1 BLDCM本体模块
在整个控制系统的仿真模型中,BLDC本体模块是最重要的部分,在分析无刷直流电机数学模型的基础上,借助于Matlab强大的仿真建模能力,根据BLDC电压方程式、反电势方程在Matlab/Simulink中建立了如图3所示的BLDC本体模块。
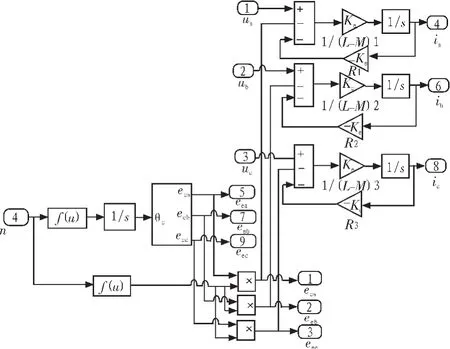
图3 BLDCM本体模块Fig.3 Module of BLDCM
该模块的建立首先要求取BLDCM的三相相电流,而由电压方程式可知,要获得三相相电流信号ia、ib、ic,则需要先求得三相反电动势信号ea、eb、ec。在BLDC的建模过程中,较难解决的一个问题便是梯形波反电动势的求取,获得理想的反电动势波形是BLDCM仿真建模的关键问题之一。若反电动势波形不理想,则会造成相电流波形不理想、转矩脉动增大等严重问题,甚至可能导致换向失败,电机失控。本方案采用分段线性法建立梯形波反电动势波形,理想情况下,星形三相六状态的BLDCM定子反电动势波如图4所示。

图4 理想反电动势波形Fig.4 Ideal waveform of BEMF
在图4中,运行周期根据转子位置的不同分为6个阶段:0~π/3,π/3~2π/3,2π/3~π, π~4π/3,4π/3~5π/3,,5π/3~2π。 在每一个阶段,都有一相反电势处于正向最大值Em,第二相反电势处于负向最大值Em,第三相反电势处于处于换向阶段。处于换相阶段的那一相的反电动势由正(负)的最大值Em沿斜线规律变化到负(正)的最大值Em,同时反电动势的大小同转子的速度成正比关系,其中Ke为反电势系数。根据转子位置和转速信号就可以求得各相反电势变化轨迹的直线方程,推出转子位置和反电势之间的线性关系,从而解决了建模仿真正BLDCM本体模块的反电势求取难题。由分段线性法得到的三相反电势波形函数如下:

2.2 参考电流模块
参考电流模块的作用是根据电流幅值信号Is和位置信号Pos给出三相参考电流,输出的三相参考电流直接输入电流滞环控制模块,用于与实际电流比较进行电流滞环控制。转子位置和三相参考电流之间的对应关系可通过S函数编程实现。表1为转子位置和三相参考电流之间的对应关系,根据此表构造S函数,建立参考电流模块如图5所示。
2.3 电流滞环控制模块
电流滞环模块的作用是让实际检测到的电流跟随参考电流的变化而变动,其输入为三相参考电流和三相实际电流,输出为PWM控制信号。通过将输入的三相参考电流和三相实际电流进行比较,输出控制逆变器的PWM控制信号。当实际电流低于参考电流且偏差大于滞环比较器的环宽时,对应相正向导通,负向关断;当实际电流超过参考电流且偏差大于滞环比较器的环宽时,对应相正向关断,负向导通。选择适当的滞环环宽,即可使实际电流不断跟踪参考电流的波形,实现电流闭环控制。电流滞环控制模块的结构框图如图6所示。

表1 转子位置与参考电流对应关系表Tab.1 Corresponding relation table of rotor position and the reference current

图5 参考电流模块Fig.5 Module of reference current

图6 电流滞环控制模块Fig.6 Control module of hysteresis current
其中 2、4、6 输入端输入经反馈得到的实际电流,1、3、5输入端输入参考电流,设计滞环的宽为0~1之间,输出端根据比较得出的结果控制PWM信号的输出。实际电流与参考电流的比较不外乎三种情况:大,小或者相等。当某相实际电流小于参考电流时,此相开通,反向关断;若是大于参考电流时,此相关断或者反向通电。考虑到逆变器的状态,三相电流的比较不可能出现三相电流大小都一样的情况,因此总共有6种输出结果。
2.4 速度控制模块
速度控制模块的结构较为简单,离散PID算法,以获得最佳的动态效果。速度PI调节模块为单输入和单输出:输入为参考转速和实际转速的差值,输出为三相参考相电流的幅值Is。其模块结构框图如图7所示。其中,Ki为PI控制器的比例参数,Kp为PI控制器的积分参数,Saturation饱和限幅模块将输出的三相参考相电流的幅值限制在要求范围内。

图7 速度PI调节模块Fig.7 Regulation module of PI on speed
2.5 三相电压逆变模块
电压逆变模块实现的是三相功率逆变桥功能,输入为电流滞环控制模块给出的PWM逆变控制信号和转子位置信号,输出为三相端电压。该模块可根据转子位置信号判断电机所处的运行阶段,输出电机三相绕组的端电压信号。表2给出了转子位置信号和功率管导通状态及端电压信号的对应关系。
根据表2中的对应关系构造S函数,构建电压逆变器仿真模块结构框图如图8所示。模块利用SimPowerSystem Toolbox中的模块,选用6个内部自带反并联续流二极管的MOSFET开关器件,构成三相逆变桥。根据表2中转子位置信号和功率管导通状态及端电压信号的对应关系,控制逆变器各功率管按一定顺序工作,得到可调的端电压三相电压输出,给BLDCM供电。
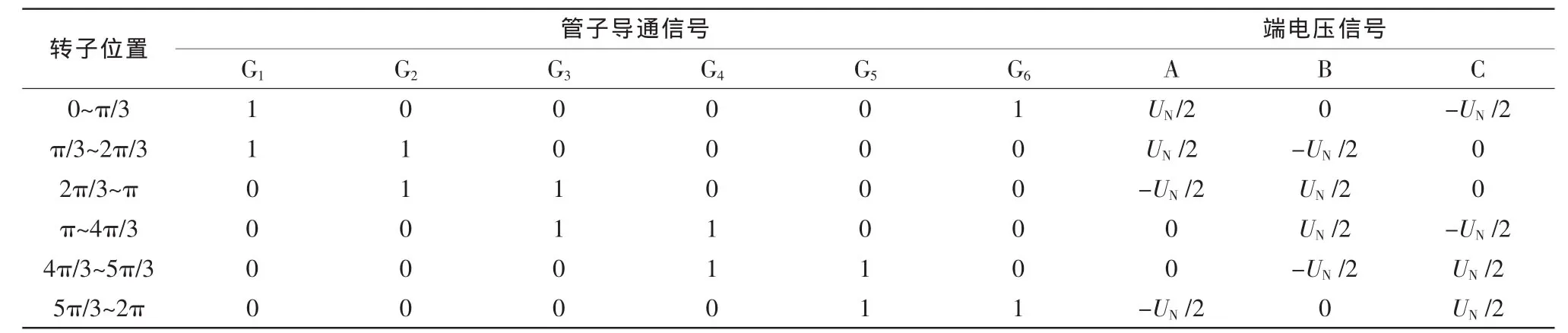
表2 转子位置信号与功率管导通状态及端电压对应关系Tab.2 Corresponding relationship of rotor position signal and the power tube conducting state and term inal voltage

图8 三相电压逆变模块Fig.8 Inverter module of three-phase voltage
2.6 转矩计算模块
根据BLDC控制系统数学模型中的电磁转矩方程式P e=eAiA+eBiB+eCiC=2EsIs,可以建立图9所示的转矩计算模块。模块输入为三相相电流与三相反电动势,通过加乘模块即可求得电磁转矩信号。
为了避免仿真开始时,w为零使得电磁转矩方程式无意义,可以将电磁转矩方程式表示为:

其推导过程为:
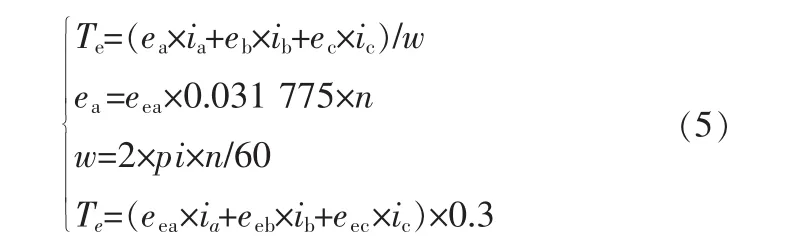
式中eea为标准反电势,其幅值为1。

图9 转矩计算模块Fig.9 Computation module of torgue
3 仿真结果及仿真结果分析
基于Matlab/Simulink建立了BLDC控制系统的仿真模型,并对该模型进行了双闭环串级控制系统的仿真。仿真中,BLDC电机参数设置为:定子相绕组电阻R=0.35 Ω,定子相绕组电感 L-M=0.00 463 H,转动惯量 J=0.002 kg·m2,阻尼系数 B=0·m·s/rad,额定转速 n=400 r/min,极对数 P5,直流母线电压U=36 V。为了验证所设计的BLDC控制系统在仿真过程中的动、静态特性,系统空载起动,得到系统转速和C相电流仿真曲线如图 10(a)和图 10(b)所示。

图10 系统仿真曲线Fig.10 Curve of simulation
由仿真波形可以看出,在ne=400 r/min的参考转速下系统能够快速、平稳响应速度的输入,并且达到参考速度输入,可以得到较为理想相电流波形,并且从波形可以看出仿真过程中没有造成较大的转矩和相电流的冲击,参考电流的限幅作用十分有效。
图11为转矩响应曲线,由于转矩与电流具有对应关系,从转矩曲线可以间接了解电流的变化情况,在起动阶段,转矩(电流)出现较大峰值,是由于转速的变化较电流变化要迟缓得多。在反电势没建立起来时,电枢电流会出现一个峰值,当转速增加,反电势建立起来后,可以发现转矩(电流)回落。转矩波形中发现曲线会在一个平衡位置附近脉动,这是由电流换向和电流滞环控制器的频繁切换造成的,转矩脉动在一定程度上会受到电流环的抑制,但是仍很难消除。文中对转矩脉动的抑制暂不做深入讨论。
4 结束语

图11 转矩响应曲线Fig.11 Response curve of torgue
提出了一种新型的模块化的BLDCM控制系统仿真建模的方法,并对各个模块进行了详细说明,最后,采用经典的速度、电流双闭环控制方法对该建模方法进行了仿真测试,结果表明:波形符合理论分析,系统能平稳运行,具有较好的静、动态特性。采用该仿真模型为分析和设计BLDCM控制系统提供有效的手段和工具,也为实际电机控制系统的设计和调试提供了新的思路。
[1]李钟明,刘卫国.稀土永磁电机[M].北京:国防工业出版社,2001.
[2]Moreira J C.Indirect sensing for rotor flux position of permanent magnet AC motors operating over a wide speed range[J].IEEE Transactions on Industry Applications,2006(6):1391-1401.
[3]HUANG Feng-tai,Tien D.A neural network approach to Position sensorless control of brushless DC motors[C]//Industrial Electronics,Control,and Instrumentation,1996.Proeeedings of the 1996 IEEE IECON and International Conference,2006:1167-1170.
[4]林平,韦鲲,张仲超.新型无刷直流电机换相转矩脉动的抑制控制方法[J].中国电机工程学报,2006(3):153-157.LIN Ping,WEI Kun,ZHANG Zhong-chao.A novel control scheme to suppress the commutation torque ripple in BLDCM[J].Proceedings of the CSEE,2006(3):153-157.
[5]张琛.直流无刷电动机原理及应用[M].北京:机械工业出版社,1996.
[6]杜晓芸,林瑞光.无位置传感器无刷直流电机的控制策略[J].电机与控制学报,2002(1):21-25.DU Xiao-yun,LIN Rui-guang.The control of positionsensorless brushless DC motor[J].Electric Machines and Control,2002(1):21-25.
