CRTSⅡ型板式无砟轨道基准网测量及平差方法
2011-06-08李新增
李新增
(铁道第三勘察设计院集团有限公司,天津 300142)
1 轨道基准网的概念
轨道基准网是CRTSⅡ型板精调的基本控制网,其理论值由布板软件根据轨道线路设计计算所得,每个轨道板缝处设置一个轨道基准点和轨道板定位点。轨道基准点和轨道板定位点分别距线路中线左右两侧各10 cm,并且采用高程比较低的点作为轨道基准点,以提高测量的精度。
2 轨道基准网测量方法
2.1 平面测量方法
轨道基准点的平面测量是左右线路分别进行测量,在底座板张拉连接并锁定后,轨道板粗铺之前进行,采用全站仪自由设站极坐标法进行观测,直接测量各点的坐标,外业采用自动记录方式。
同一测站CPⅢ点和轨道基准点均采用全站仪盘左进行观测,进行多个半测回观测。每个半测回观测过程如下:①顺次观测所有CPⅢ点(6~8个);②由远及近顺次观测轨道基准点(11~13个);③按照同样的流程进行下一个半测回测量;④各个半测回结束时,再顺次观测所有CPⅢ点。轨道基准点观测不应少于3次,CPⅢ点观测不应少于4次。此为一个测站的观测程序,一个测站结束后搬至下一站,按同样的程序进行测量(如图1所示)。
每站观测距离约70 m,至少观测11个轨道基准点,重复观测上一测站的CPⅢ点不应少于2对,重复观测上一测站观测的轨道基准点3~5个。本站观测的所有轨道基准点(包含重复观测上一站的轨道基准点)都必须位于测站的同一侧。
每站轨道基准点测量时,采用同一组棱镜三脚座和精密棱镜。在观测轨道基准点时,应由远及近完成全部轨道基准点测量。每次安置棱镜三脚座时,要精确整平棱镜三脚座,在棱镜三脚座移动过程中,棱镜应始终面对全站仪。对于CPⅢ棱镜组件和棱镜三脚座上棱镜不一致的,需要检查仪器中输入的棱镜常数是否正确。
2.2 高程测量方法
高程测量应该在轨道板粗铺之后进行,按照附合水准方法和中视水准测量方法相结合进行施测,轨道基准点一般作为中视点,除首末CPⅢ点外,其余CPⅢ点作为附合水准线路的转点。左右线路的轨道基准点的高程可同时施测。采用电子水准仪进行往返观测,起闭于CPⅢ点,附合水准线路长度约300 m为一个测段。在轨道基准点上立尺时,水准尺须使用水准尺适配器;在CPⅢ点立尺时,不使用水准尺适配器,须使用与CPⅢ网测量时一致的水准测量杆。水准尺适配器常数需准确测定,同时保证水准尺适配器与轨道基准点测钉的匹配。在同一站内的所有轨道基准点高程测量时应采用同一把水准尺及其配套水准尺适配器。水准尺适配器常数在外业是不输入的,但在内业数据处理中进行修正。
在两个CPⅢ点中部安置水准仪,后视一个CPⅢ点(如CPⅢ1),前视另一个CPⅢ点(如CPⅢ2)或轨道基准点,采用中视法测量该区间所有的轨道基准点(可以包括左右2条线路的轨道基准点),然后搬站至CPⅢ2和CPⅢ3之间,重复上一个测站过程。相邻两站之间不需重叠轨道基准点,但相邻测段之间应重叠3~5个轨道基准点(如图2所示)。

图2 轨道基准网高程观测示意
3 轨道基准网平差精度要求
控制点Y和X坐标偏差:即坐标的参数转换,用计算出来的转换参数对CPⅢ点进行转换,转换后的值和原值的差值不能大于2 mm。如果不能达到要求则需重测,并且需要检查CPⅢ网的精度,如果CPⅢ网的相对精度达不到要求则需对CPⅢ网进行重测。
相对多次测量坐标平差值Y和X偏差:通过4次CPⅢ和3次CPⅣ测量,并且剔除了粗差后,剩余的观测值取平均值,然后每个观测值再和平均值比较,如果其差值大于0.4 mm则需对此观测值剔除,每个点(包括CPⅢ和CPⅣ)最少需保留两个观测值,如果CPⅢ达不到要求,则需对此CPⅢ点进行剔除,每站CPⅢ点最少需要保留4个,并且线路两侧成对的CPⅢ点不能同时剔除,否则本站重测。
每个CPⅣ点重叠区内的横向偏差和纵向平差:相邻两站间需重叠3~5个CPⅣ点,通过平差后,每个CPⅣ点在线路横向上分配的误差不能大于0.3 mm,纵向上分配的误差不能大于0.4 mm。
4 轨道基准网平差过程
4.1 平面网平差步骤
第一:读取原始数据,按照前述的观测精度,检查数据是否合乎观测要求,如果不能满足要求则需重新测量。
第二:数据观测满足要求后进行参数转化,把观测的自由坐标系转化为施工坐标系,一般采用三参数转换法。
第三:对重叠区的CPⅣ点进行横向和纵向限差的检查,检查时可以用理论数据确定横向和纵向确定(如图3所示)。

图3 平面网平差步骤示意
根据P1、P2、P3三点的理论坐标分别可以算出P3P2和P1P2两个方位角
A1=arctan(P2P3)=(Y3-Y2)/(X3-X2)A2=
arctan(P2P1)=(Y1-Y2)/(X1-X2)
则p2点的横向方向为A=A1+(A2-A1)/2,与其垂直的右向为纵向。
计算重叠区各点横向和纵向的偏差:

图4 重叠区横向与纵向偏差计算
如图4所示,接头点分别为P1、P2、P3三个点,其中其中P10、P20、P30为理论值,P11、P21、P31为第一站测量值,P12、P22、P32为第二站的测量值。
根据前面所述的计算方法分别计算P1、P2、P3三点处的横向和纵向方位角,并根据计算的值建立坐标系,原点分别为三个点的理论值。以P20为原点,Q为横向,R为纵向建立线路坐标系。坐标系建立完成之后,把P2点的两次测量值分别转换到此坐标系下的坐标,则可以求出两次观测在横向和纵向上的差值。
同理计算P1点和P3点在横向和纵向上的差值。各点的限差要求应满足前面所提到的限差要求。
第四:重叠区的CPⅣ点横向和纵向偏差满足要求后,在线路坐标系下按照余弦定权的方式进行曲线拟合。
第五:把线路坐标系下的坐标转换成施工坐标系下的坐标,计算完成后输出成果,用于下序工作。
4.2 高程网平差步骤
高程网平差步骤和平面网基本一致,平差时采用严密平差,定权方式也可以采用余弦定权方式。
5 软件测试
5.1 平面测试
根据上述平差方法,开发了TSDI_CPIVADJ平差软件,为了验证该软件的可靠性,将京沪高速铁路长约500 m的轨道基准网平面观测数据,共70个CPⅣ点,分别用TSDI_CPIVADJ软件和德国PVP施工版软件进行平差,然后将两软件的平差成果进行比较。
(1) 坐标变换残差比较
采用两种软件进行坐标转换,其CPⅢ的残差均一致,说明四参转换的方法是正确的。表1是其中的某一站数据,采用两个软件转换后的残差,其比较结果如表1所示。
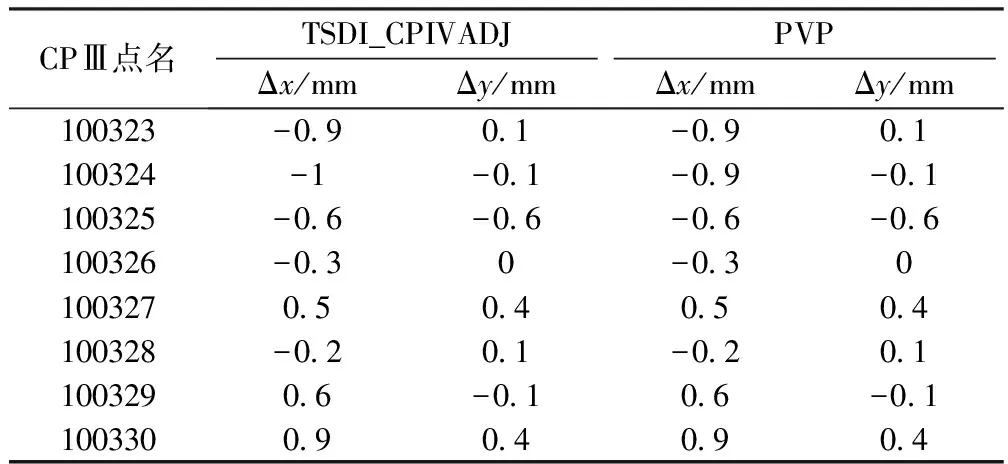
表1 残差比较
(2)搭接点相关量比较
用两种软件进行测站间搭界处理后,两种软件的线路横向、纵向坐标差及其加权值均一样。以某相邻两站的搭接点为例来比较两软件,其比较结果如表2所示。
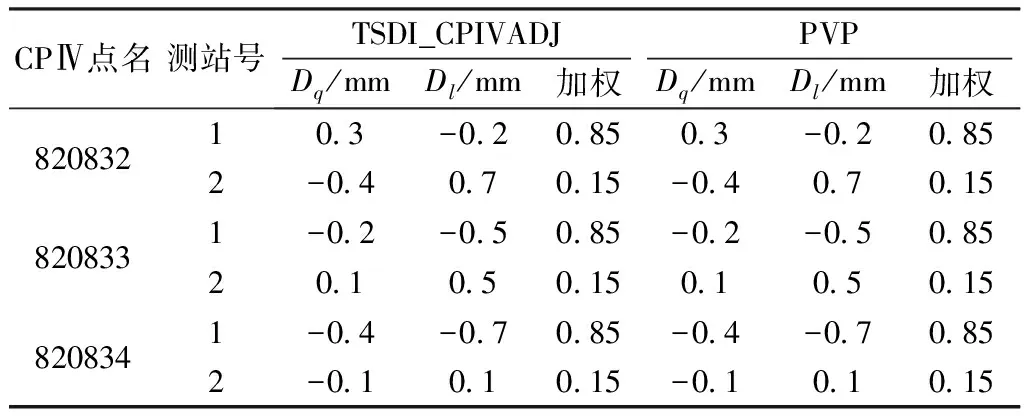
表2 搭接点相关量比较
(3)坐标成果比较
将上述70个CPⅣ点的TSDI_CPIVADJ软件与PVP软件的平差坐标X、Y分别进行作差比较,其比较结果如表3所示。

表3 平差坐标X、Y比较
5.2 高程测试
为检测TSDI_CPIVADJ平差软件的高程平差成果的可靠性,将京沪高速铁路长约300 m的轨道基准网高程观测数据,共91个CPⅣ点,其中左线45个点,右线46个点。分别用TSDI_CPIVADJ软件、德国PVP施工版软件进行平差,然后将两软件的平差高程作差比较,其比较结果如表4所示。
6 结论
从京沪、石武及津秦等高速铁路的工程实践来看,本文所介绍的测量方法高效可靠,依据本文介绍的平差算法所编制的CPⅣ平差软件与德国PVP软件平差成果保持高度一致,软件使用方便,受到了各施工单位的认可。
[1]中铁二院工程集团有限责任公司. 高速铁路工程测量规范[M].北京:中国铁道出版社, 2010
[2]中铁二院工程集团有限责任公司. 铁路工程测量规范[M].北京:中国铁道出版社,2010
[3]武汉测绘科技大学测量平差教研室.测量平差基础[M].北京:测绘出版社,1994
