船舶航迹跟踪的滑模控制
2011-06-07邢道奇张良欣
邢道奇 张良欣
(海军工程大学 后勤指挥与工程系 天津 300450)
0 引 言
由于对船舶控制要求的不断提高,船舶航向控制已经不能满足实际需要,从而促使航迹跟踪控制研究成为船舶控制的研究热点。
根据期望航迹是否为时间的函数,船舶航迹跟踪可分为路径跟踪 (path tracking)和轨迹跟踪(trajectory tracking)。路径跟踪不需考虑时间的静态几何位置跟踪,而轨迹跟踪则要求实时跟踪时变的期望轨迹,其跟踪控制的实现比路径跟踪困难得多[1]。同时,由于船舶运动具有惯性大、非线性、模型参数不确定以及存在扰动等特点,因此船舶航迹控制成为了一个非线性问题,若采用线性的船舶模型,则会对航迹跟踪控制性能产生影响,难以满足控制要求。故本文采用非线性船舶模型进行船舶轨迹跟踪控制器设计。
滑模控制器因其具有对系统参数摄动和外界干扰的强鲁棒性,以及控制计算量小、实时性强、快速性好等特点,在解决船舶非线性控制问题上,得到了广泛地运用[2,3]。 本文将滑模控制方法[4]引入到船舶轨迹跟踪控制中,采用指数趋近律进行滑模控制器设计,对动态直线轨迹和环形轨迹的跟踪控制进行了仿真试验,以验证所设计的滑模控制器的有效性。仿真结果表明:滑模控制器的轨迹跟踪控制性能良好,能精确跟踪船舶航迹。
1 船舶非线性数学模型[5]
虽然船舶在海洋中实际运动时通常具有6个自由度,但是,对大多数船舶运动及其控制问题而言,仅考虑3个自由度的平面运动是可行的。因此,本文以船舶平面运动方程为基础,研究船舶轨迹控制问题。
向量 η=[x,y,ψ]T表示地球 NED 坐标系中船舶的位置和首向角,向量 v=[u,v,r]T表示船体坐标系中船舶的纵向速度、横向速度和首向角速度。
地球NED坐标系和船体坐标系之间转换的运动学方程为:

船体坐标系中的船舶平面运动方程为:

其中,坐标系转换矩阵为:
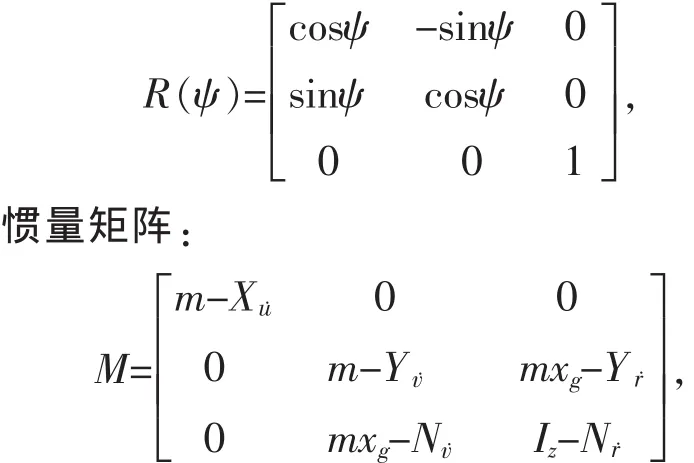
科氏和向心力矩阵为:
阻尼矩阵为:
式中:τ=[τ1,τ2,τ3]T分别是纵向和横向推进力和转向力矩的控制输入,c1=(m-Yv˙)v+(mxg-Yr˙)r,c2=m-Xu˙,xg为船体坐标系中船舶重心在x轴方向上的坐标值,Xu、Xu˙、Yv、Yv˙、Yr、Yr˙、Nv、Nr、Nv、Nr、Iz为船舶水动力参数。

定义地球坐标系中的动态期望轨迹为:xd(t)、yd(t)和 ψd(t)分别为 t时刻船舶的期望位置和首向角。
2 航迹跟踪的滑模控制器设计
2.1 滑模控制器设计
由式(1)可得:

将式(4)代入式(2)中,船舶动力学方程变为:
定义轨迹跟踪误差量[5]为:

假设期望轨迹 ηd,和光滑且有界,定义虚拟期望轨迹为:

式中:Δ>0为正定的设计对角矩阵。
设计船舶跟踪控制的滑模面为:

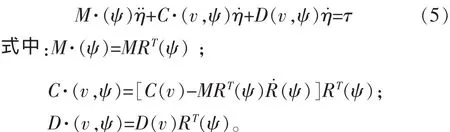
由式(5)、(9)得:

定义滑模控制规律为[3]:

式中:τe为等效控制,τs为切换控制。

为了快速到达滑模面,考虑指数趋近律:

式中:设计控制矩阵 K=diag{k1,k2,k3};

由式(10)~(13)可得切换控制为:

由式(11)、(12)、(14)得滑模控制器控制规律为:

由式(15)可设计船舶航迹跟踪的控制框图,如下页图1所示。
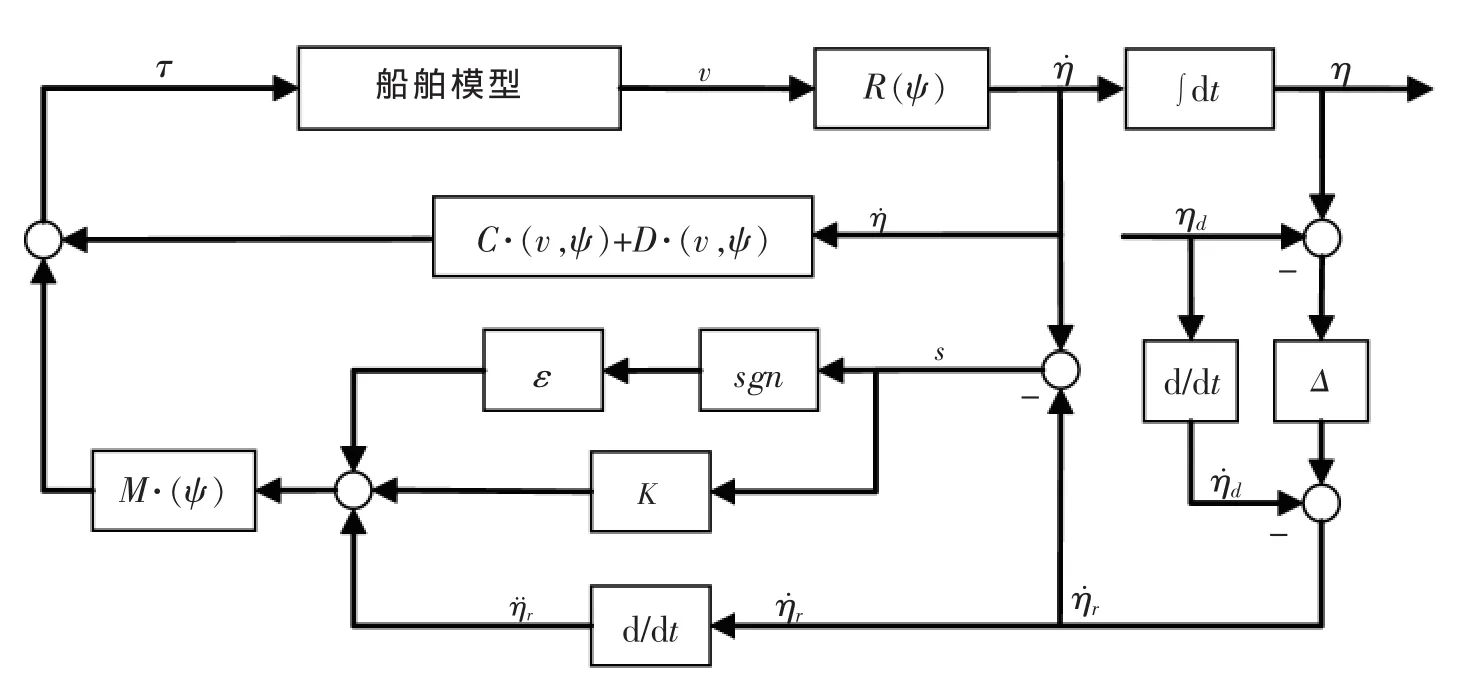
图1 船舶航迹跟踪的控制框图
2.2 稳定性分析
定义 Lyapunov 函数[4,6]为:

由于惯性矩阵M是正定的,由推导可知M·(ψ)是可逆的,则式(10)变为:
将式(15)代入上式可得:

设计参数矩阵 K=diag{k1,k2,k3}和 ε=diag{ε1,ε2,ε3}是 3×3正定对称矩阵,可得:

即对于船舶运动非线性方程式(1)、(2),设计其滑动模态,如式(9);相应的滑模控制规律为式(15),则滑动模态是渐近稳定的,且跟踪误差趋于0。
3 仿真试验
以挪威科技大学全驱动模型船CybershipⅡ为仿真对象[7],采用图1所示的控制规律,对其进行航迹跟踪控制仿真,模型船主要参数见表1。
滑模控制器参数设计 为:Δ=diag{15,15,15},K=diag{1,1,1},ε=diag{0.01,0.01,0.01}
3.1 仿真试验1
选择期望轨迹为:ηd=[t,t,0]T, 船舶初始状态
12为:η0=[80 m,10 m,20°]T。 即期望轨迹相当于模型船以0°的首向角,沿直线Y=X航行。由图2、3可看出船舶能够较好地跟踪期望轨迹,控制效果良好。
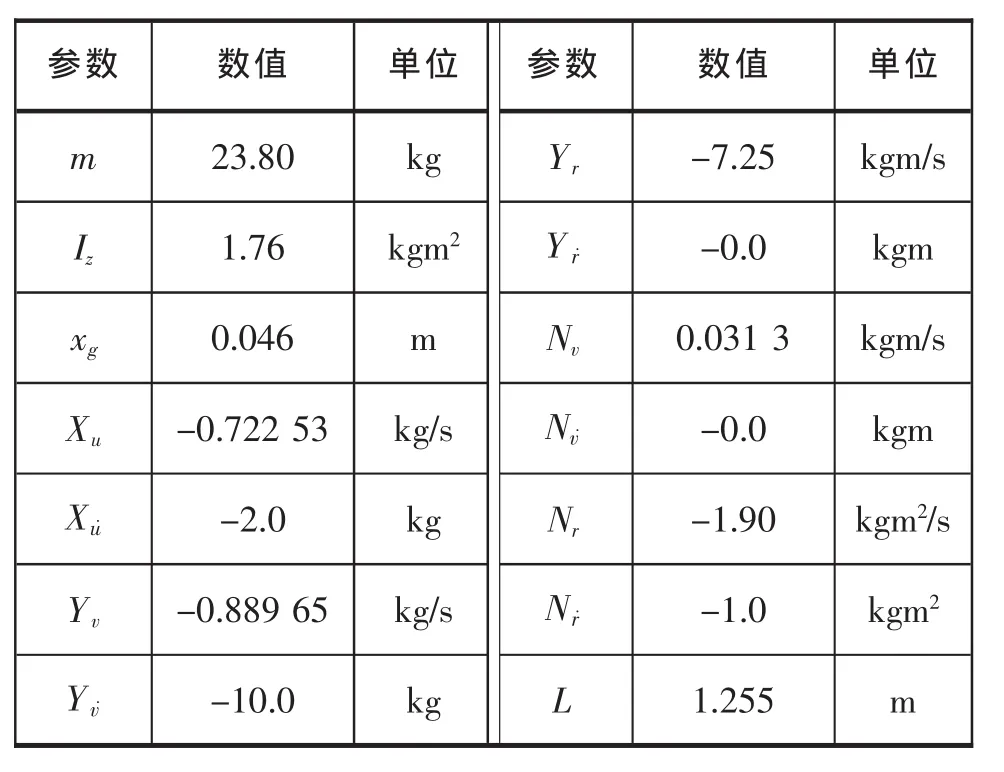
表1 模型船主要参数
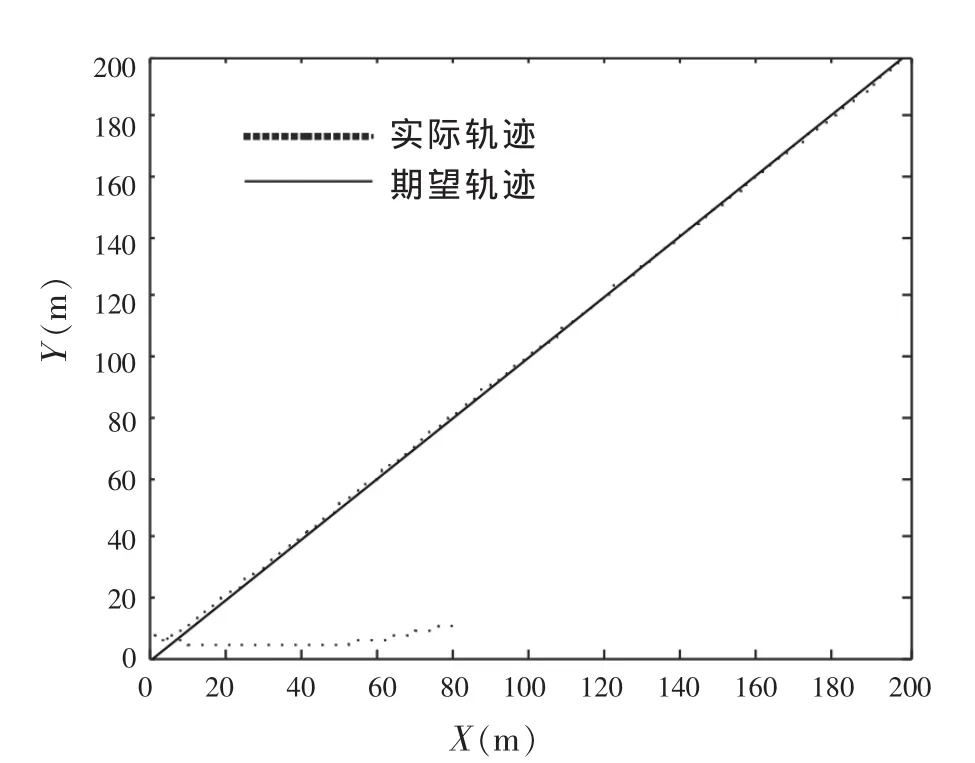
图2 船舶轨迹跟踪曲线
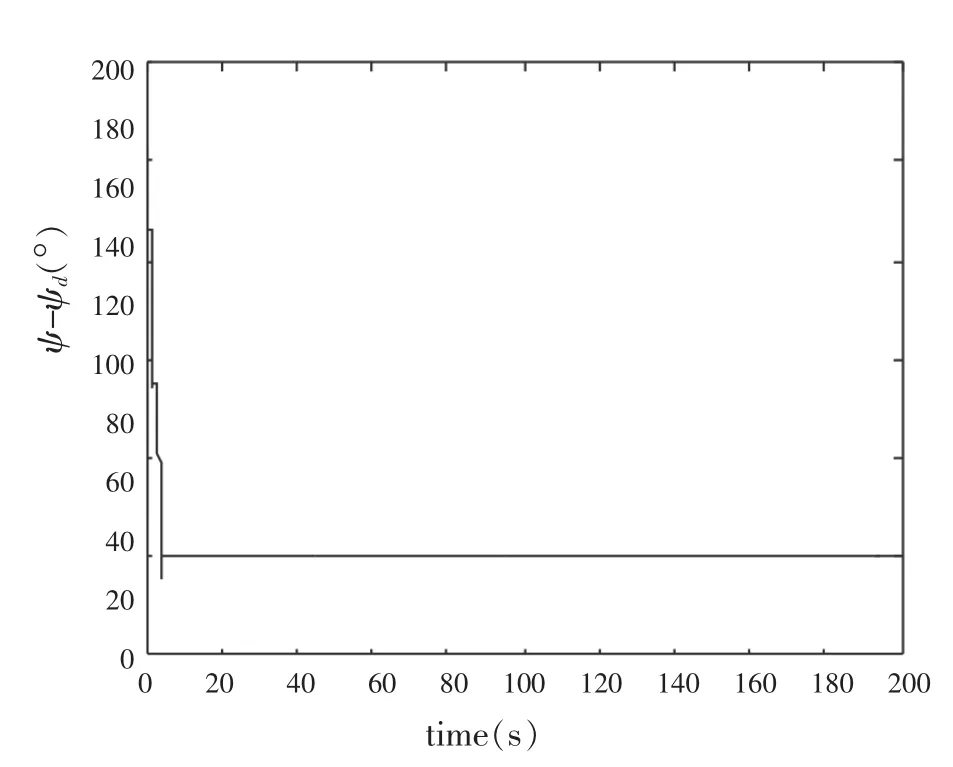
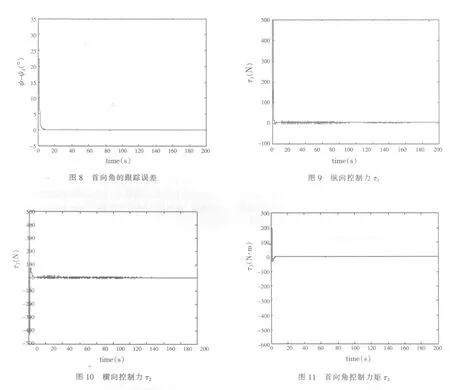
图3 首向角的跟踪误差
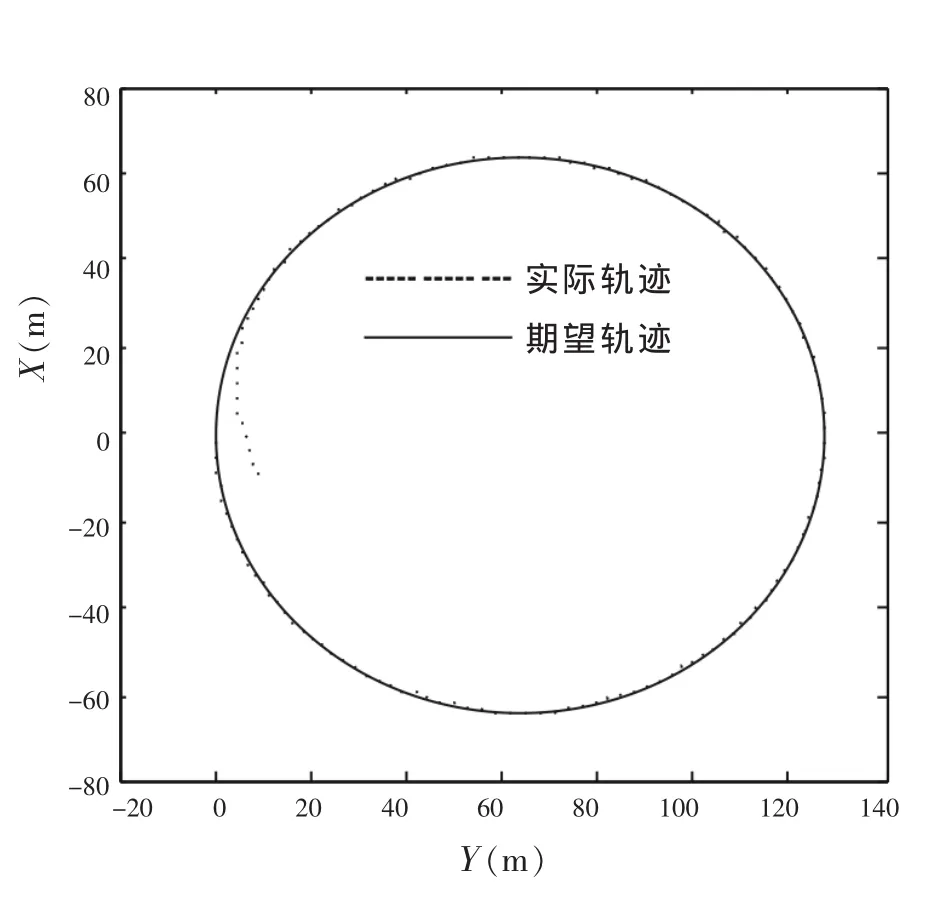
图4 船舶轨迹跟踪曲线

图5 位置X的跟踪比较
3.2 仿真试验2
在仿真中,给定期望轨迹为:
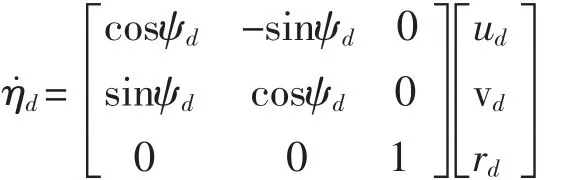
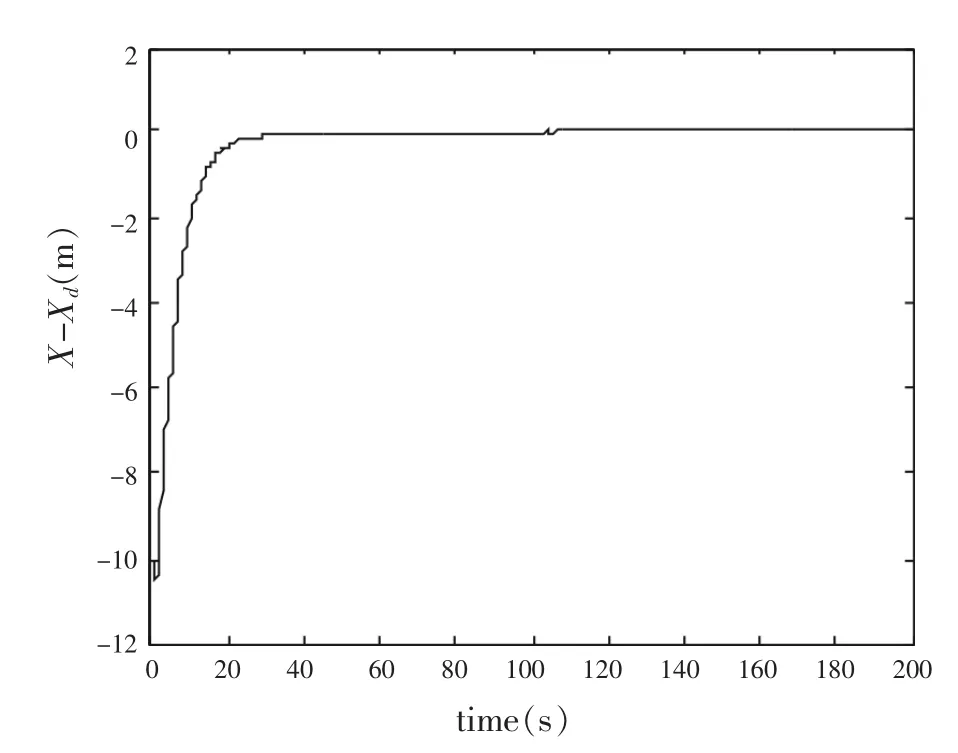
图6 位置X的跟踪误差
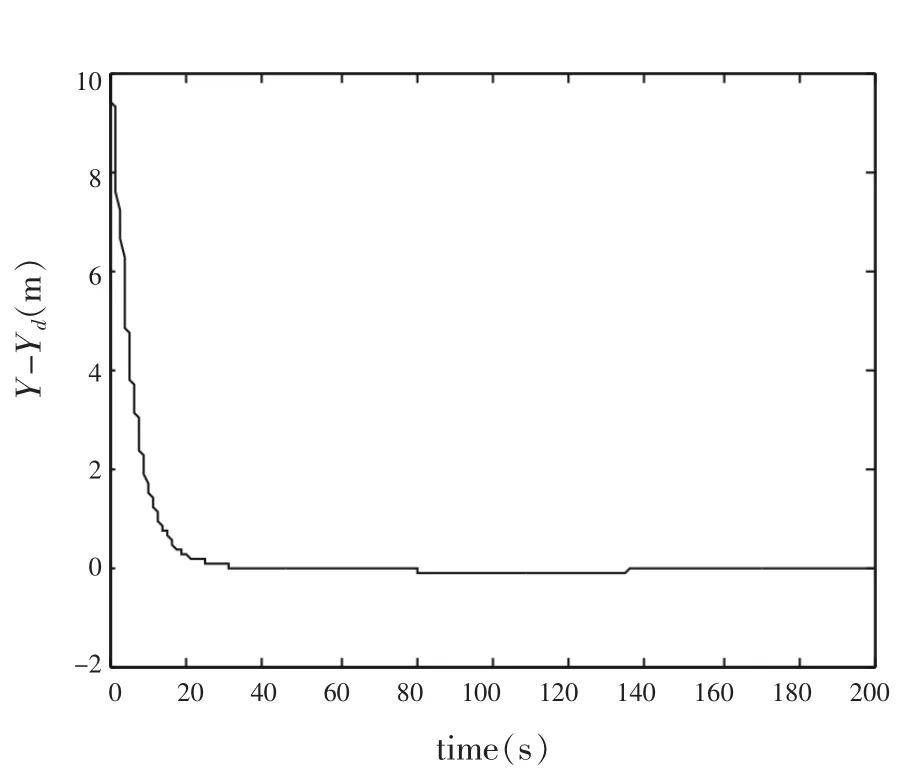
图7 位置Y的跟踪误差
式中:ud=2 m/s、vd=0 m/s、rd=0.01π(rad/s),即期望轨迹相当于模型船以2 m/s的速度、沿半径为200/π(m)的圆航行,初始位置设为:η0=[-10 m,10 m,10°]T。
从图4~8可看出,船舶可快速精确跟踪期望轨迹,使跟踪误差趋近于0,跟踪控制性能良好。下页中图9~11是船舶纵向、横向控制力和首向角力矩曲线。从中可以看出,控制输入经过较大调整后,快速趋近于相对稳定的状态。但是由于滑模控制固有的局限,控制输入出现了抖振。如何抑制轨迹跟踪控制中的抖振是今后研究中需要解决的问题。
4 结 语
本文建立了全驱动船舶非线性平面运动方程,设计了船舶轨迹跟踪的滑模控制器,以全驱动模型船Cybership II为仿真对象,对2种期望动态轨迹跟踪控制进行了仿真试验,仿真结果验证了滑模控制器的有效性,跟踪控制性能良好。
[1]郭晨,汪洋,孙富春,等.欠驱动水面船舶运动控制研究综述[J].控制与决策.2009,24(3):321-329.
[2]Fahimi F.Sliding-Mode Formation Control for Underactuated Surface Vessels[J].IEEE TRANSACTIONS ON ROBOTICS.2007,23(3):617-622.
[3]Alfaro-Cid E,Mcgookin E W,Murray-Smitha D J,et al.genetic algorithmsoptimization ofdecoupled Sliding Mode controllers:simulatedandreal results [J]. Control Engineering Practice.2005,13:739-748.
[4]胡跃明.变结构控制理论与应用[M].北京:科学出版社,2003.
[5]Fossen T I.Marine Control Systems:guidance,navigation and control of ships,rigs and underwater vehicles [M].Trondheim,Norway:Marine Cybernetics,2002.
[6]高为炳.变结构控制理论基础[M].北京:科学技术出版社,1990.
[7]Skjetne R.The Maneuvering Problem[D].Norwegian University of Science and Technology,2005.