欠驱动水面船舶的曲线航迹跟踪控制
2011-06-05曾薄文朱齐丹于瑞亭
曾薄文,朱齐丹于瑞亭
(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)
近年来,欠驱动系统的控制引起了不少学者的关注.欠驱动系统是指控制输入向量空间的维数小于其广义坐标向量空间维数的情况,即系统的独立控制输入量少于其自由度[1-2].目前,海上运行的相当数量的船舶是依靠推力和转船力矩这两个独立的控制输入来实现水平面3个自由度的运动控制,因此对其研究可归结为欠驱动控制问题.
为了经济以及安全的目的,船舶需要按照设定的航线(直线或曲线)行驶.上世纪90年代,船舶航迹跟踪控制就已引起人们的极大关注.由于欠驱动水面船舶在横向上未装备驱动装置,加速度带有不可积的非完整约束条件,并且无法通过坐标变换转换成无漂的链式系统来处理等原因,使得欠驱动船舶的航迹跟踪控制设计非常困难[3],其根本原因在于不满足著名的Brockett定理的必要条件.因此欠驱动船舶的航迹跟踪控制具有极其重要的理论与实践意义,已经成为当今船舶运动控制研究的一个热点,DO等[5]基于重定义输出和反步技术提出了全局k指数稳定直线航迹状态及输出反馈控制律.韩冰等[4]采用直接动态反馈线性化建立等效模型,再设计反馈控制使跟踪误差全局渐近镇定的方法对直线航迹控制进行了研究,李铁山等[6]将严格耗散的概念引入到船舶直线航迹控制系统中,研究了不完全驱动船舶在有外界干扰作用下的直线航迹鲁棒控制问题.周岗等[7-8]分别利用输入输出线性化技术和重定义输出变量的思想对欠驱动船舶的直线航迹控制的稳定性进行了研究,得到了系统全局渐近稳定的充分条件及推论.
以上文献对于欠驱动船舶的直线航迹跟踪控制的研究,其假设条件均为航速已单独实现控制,即所研究的问题为定航速下的直线航迹跟踪控制,此时期望的航向角速度为零,同时忽略了侧移对船舶运动的影响,这一假设条件大大简化了对水面船舶的航迹跟踪问题.且所提出的控制方法并不适合曲线航迹跟踪,为此基于反步法设计原理提出了一种欠驱动水面船舶的曲线航迹跟踪控制方法,可实现航速、侧移和位置的同步跟踪.
1 控制系统数学模型
考虑如下欠驱动水面船舶,如图1所示.
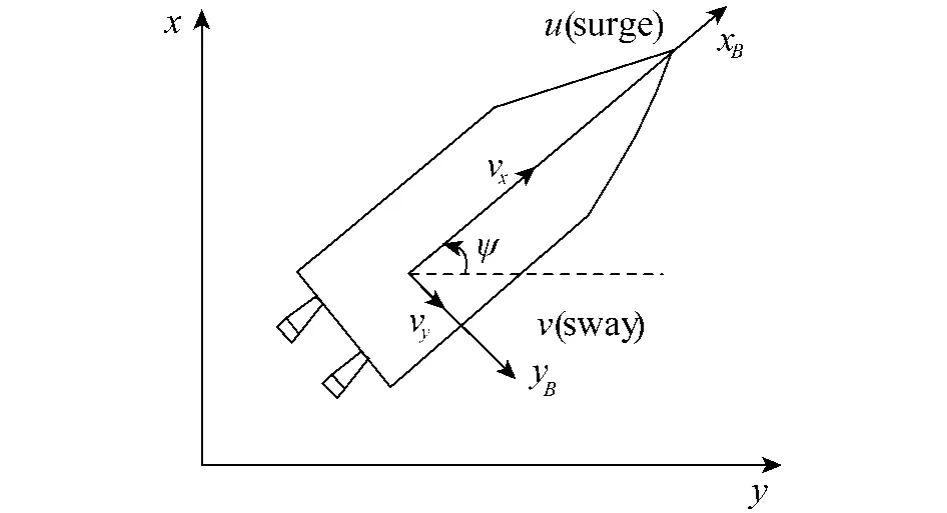
图1 欠驱动水面船舶Fig.1 Underactuated surface vessel
本文的研究仅考虑水面船舶在水平面上3个自由度的运动,忽略船舶的升沉、纵摇和横摇运动,并同时采用如下假设:1)艇体坐标系的轴位于艇的惯性主轴上;2)原点选在船体重心上;3)船体质量均匀分布;4)船关于2个坐标轴对称.
参照文献[9],欠驱动船舶的运动学方程和动力学方程可以表示为

其中,M=diag(m11,m22,m33)是惯性参数矩阵,D=diag(d11,d22,d33)是水动力阻尼参数矩阵,η =[x y ψ]T,V=[u v r]T,τ =[τ1,0,τ3]T,τ1和τ3分别为水面船舶的纵向推进力和转向力矩.因为没有侧向推进装置,在横向上没有可用的控制输入,因此所研究的船舶航迹跟踪问题为欠驱动控制问题,C(v)为科里奥利和向心力矩阵.

方程(1)是在假设船体前后及左右对称的条件下得到的,但是对于常规水面艇来说都是左右对称的,而前后是不对称的,这说明惯性矩阵M中的m23=m32≠0,水动力阻尼项 d23≠d32≠0,对于大多数船舶这些非对角线元素相对于主对角线元素mii,dii(i=1,2,3)是小量,对最终控制器性能影响很小,因此在控制器设计时可将其忽略.将式(1)、(2)的矩阵方程组展开,可得到如下以展开形式表示的水面船舶水平面运动方程:

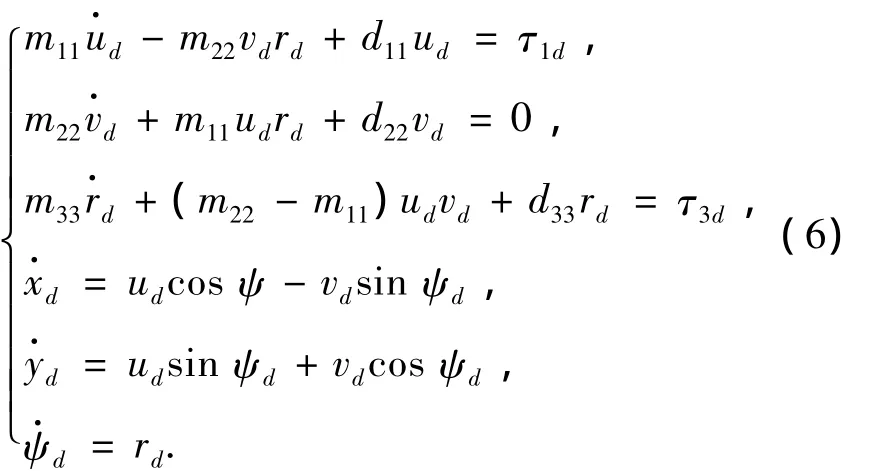
对于给定的有界可行的参考轨迹(xd,yd,ψd,ud,vd,rd)和参考控制输入(τ1d,τ3d),满足
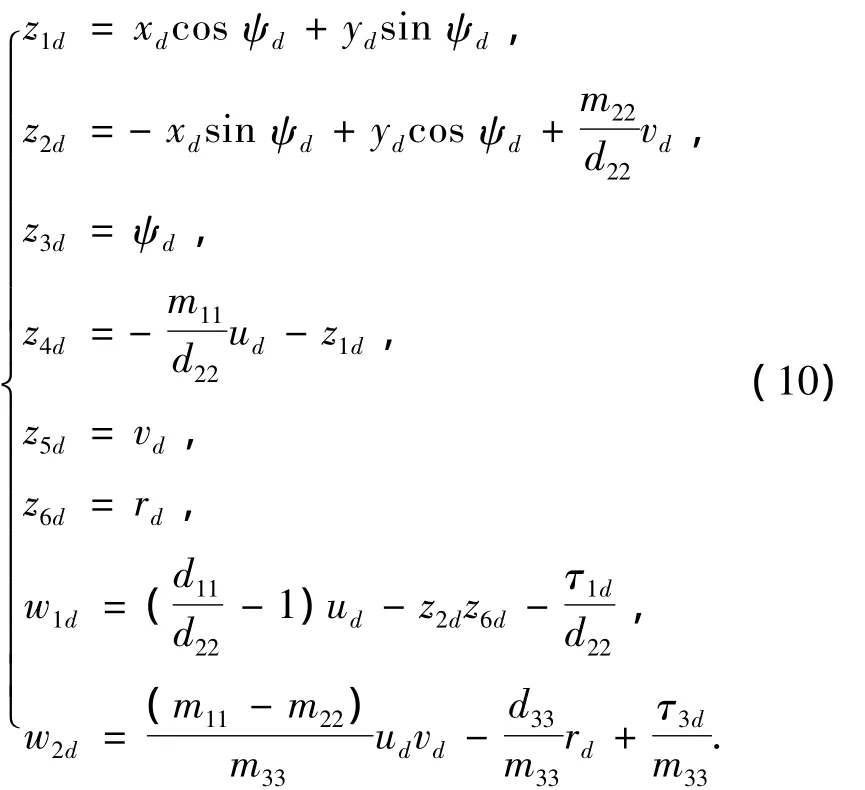
对系统(5)进行微分同胚变换,令

控制输入变换:
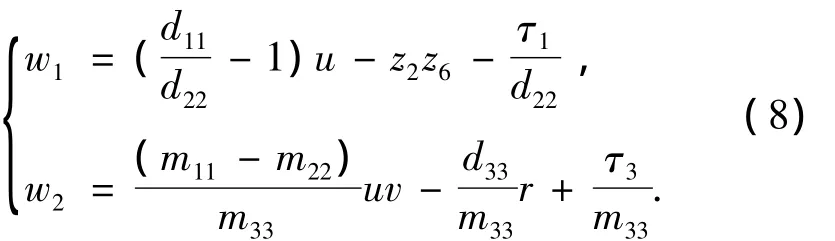
则整理后新的状态方程为
同理,可对指定的参考轨迹作相同变换
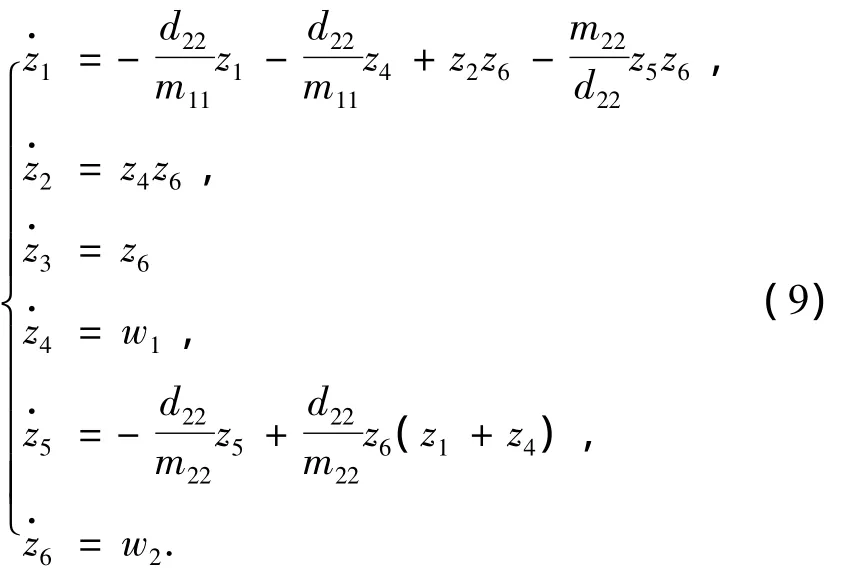
变换后的系统状态方程可表达为

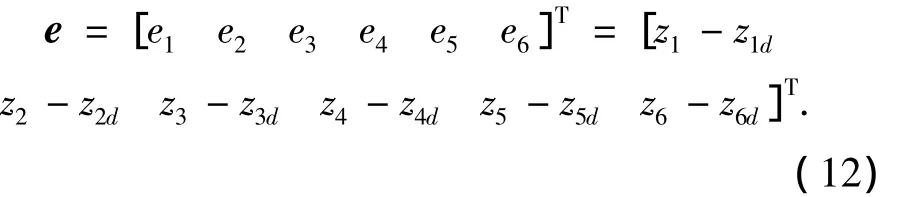
定义跟踪误差:
式(9)减去式(11),得

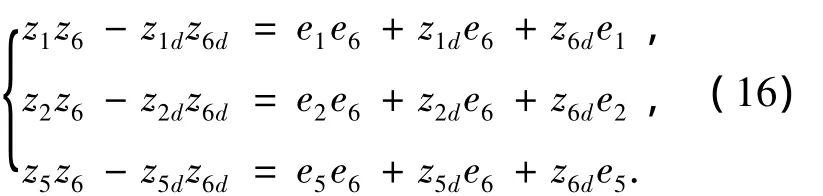
为了从式(13)、(14)中消去 z1、z2、z4、z5、z6,作如下处理:

同理,有
将式(15)、(16)代入式(13)、(14)可得

通过状态变换和输入变换(7)、(8)、(10),对于误差系统如果有成立时,则(x,y,ψ,u,v,r)渐近收敛于(xd,yd,ψd,ud,vd,rd).

定理 1 假设(xd,yd,ψd,ud,vd,rd)是可行的参考轨迹并且有界,如果存在一种控制律使得系统(18)渐近稳定,则该控制律同样可以使得系统(17)渐近稳定.
证明 因为(xd,yd,ψd,ud,vd,rd))有界,所以(z1d,z2d,z3d,z4d,z5d,z6d)有界.假设存在控制律和w2使得系统(18)渐近稳定,则有…,6)成立.定义Lyapunov函数:

其对时间的导数为

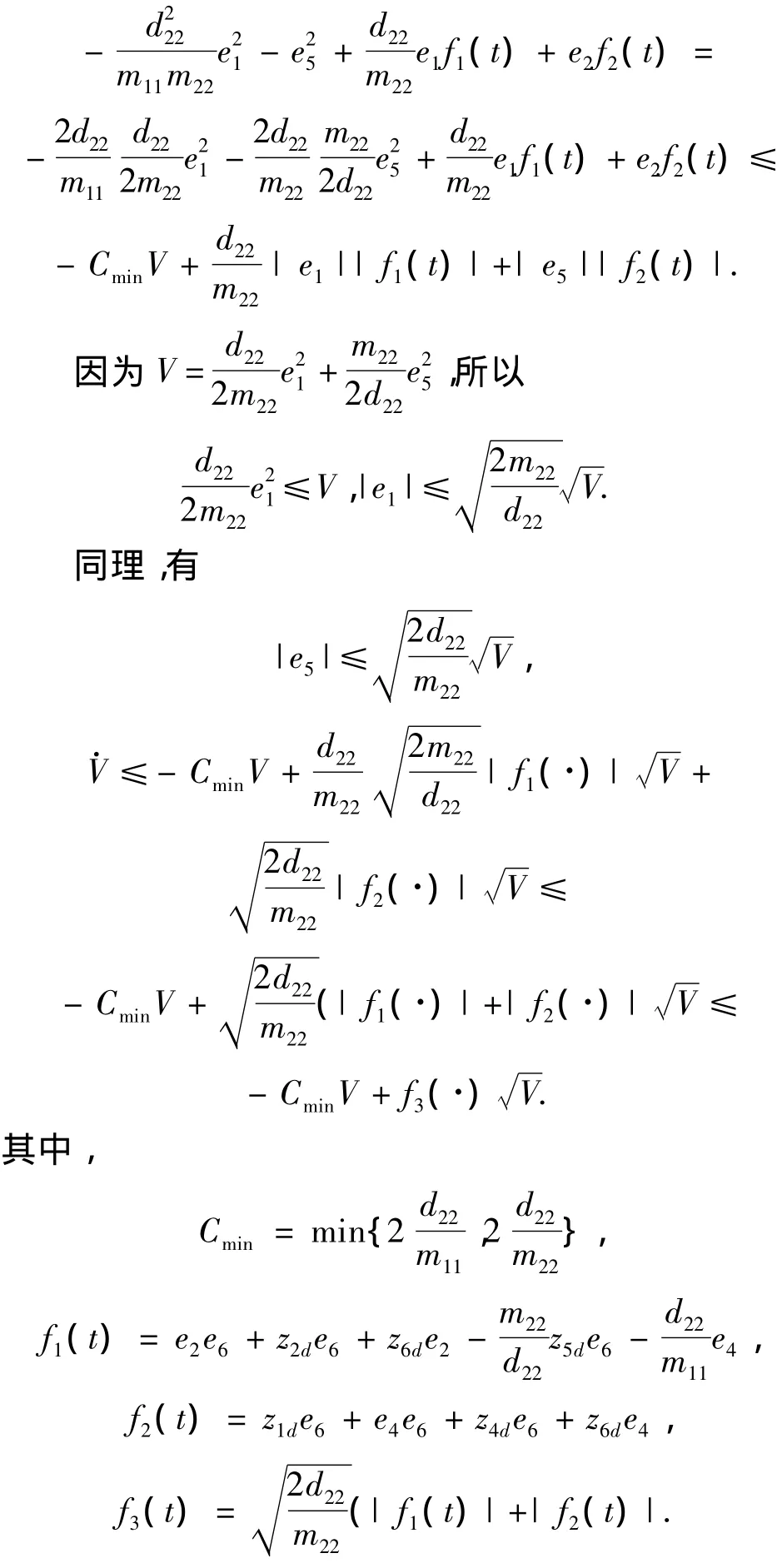

由比较定理可知,W(t)满足:

因为Cmin>0,f3(t)有界且在有限时间内收敛为0,由引理可知,W有界且收敛为0,可知V有界且收敛为0,进而可知e1和e5是有界的,且收敛为0.
证明完毕.

2 跟踪控制器设计
由定理1,采用反步法构造系统(18)的反馈镇定律,并提出以下定理
定理2 对于如下控制律:
假设系统(18)状态满足{e2,e3,e4,e6}∈Ω,Ω ={(e2,e3,e4,e6)∈R4|α +z6d≠0|},则控制律(20)使得系统(18)渐近稳定.
证明:考虑如下子系统:
1)为使状态e3指数稳定,视e6为虚拟控制输入,令 e6=α,α =-k3e3,k3>0.系统(21)变为






综上所述,系统(18)在控制律(20)的作用下是渐近稳定的.
证明完毕.

由式(8)得原系统(5)的控制输入为

根据上述控制器设计,给出如下定理.
定理3 对系统(5),如果参考轨迹(xd,yd,ψd,ud,vd,rd)是可行的并且有界,在控制律(29)的作用下,(x,y,ψ,u,v,r)全局渐近收敛于(xd,yd,ψd,ud,vd,rd).
3 仿真
采用文献[9]中的水池实验用的船模参数进行仿真试验,具体参数取为m11=200 kg,m22=250 kg,m33=80 kg,d11=70 kg/s,d22=100 kg/s,d33=50 kg/s.
不失一般性,将跟踪的曲线设定为圆,并选择两个具有代表性的不同初始位置查看控制器的跟踪效果.控制器的参数取为:k2=1.2,k3=1,k4=5,k6=6,(xd,yd,ψd,ud,vd,rd)设 定 为[Rcost,Rsint,t+ π/2,3,0,1)],(w1d,w2d)为(0,0),当初始状态(x,y,ψ,u,v,r)设定为(0,0,0,0,0,0)时,仿真结果如图2~4所示.
由图2(a)、(b)、(c)可知在所控制律的作用下,闭环系统的曲线航迹跟踪误差在有限时间内渐进收敛为0,其中图2(c)显示了误差e1、e5的收敛状态,证明了定理1的正确性.图2(d)给出了欠驱动水动力船舶的响应曲线,可知控制输入均为有界的.图3分别显示了系统状态 ψ、x、y 和 u、v、r的跟踪曲线.欠驱动船舶在水平面的圆的跟踪航迹如图4所示.

图2 误差渐进收敛曲线和控制输入Fig.2 Convergence of the error states and control inputs
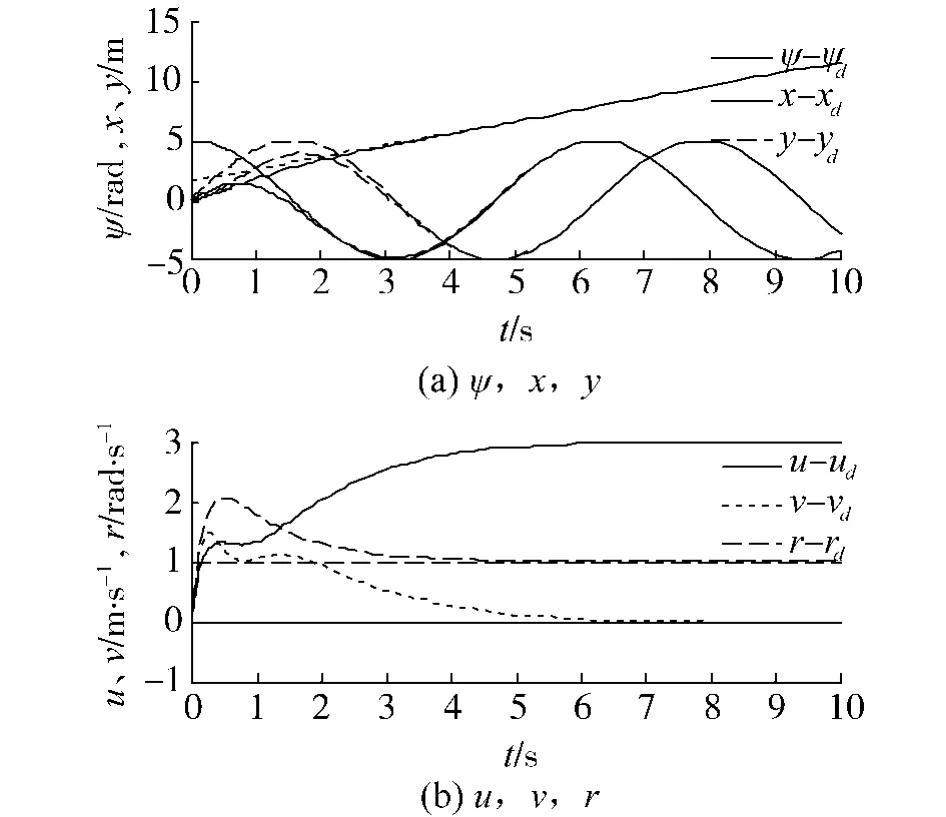
图3 系统状态跟踪曲线Fig.3 Response of ψ,x,y and u,v,r
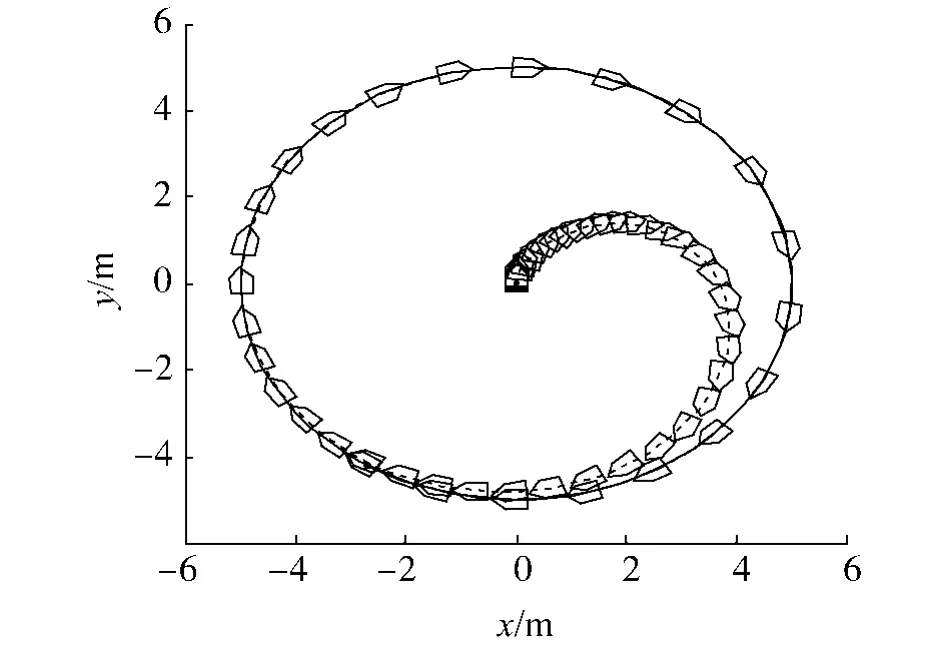
图4 欠驱动船舶水平面的跟踪航迹Fig.4 Traces of underactuated surface vessel
控制器参数取不同值4,当系统初始状态为(x,y,ψ,u,v,r)设定为(5,5,π/2,0,0,0)时,仿真结果如图5~7所示.
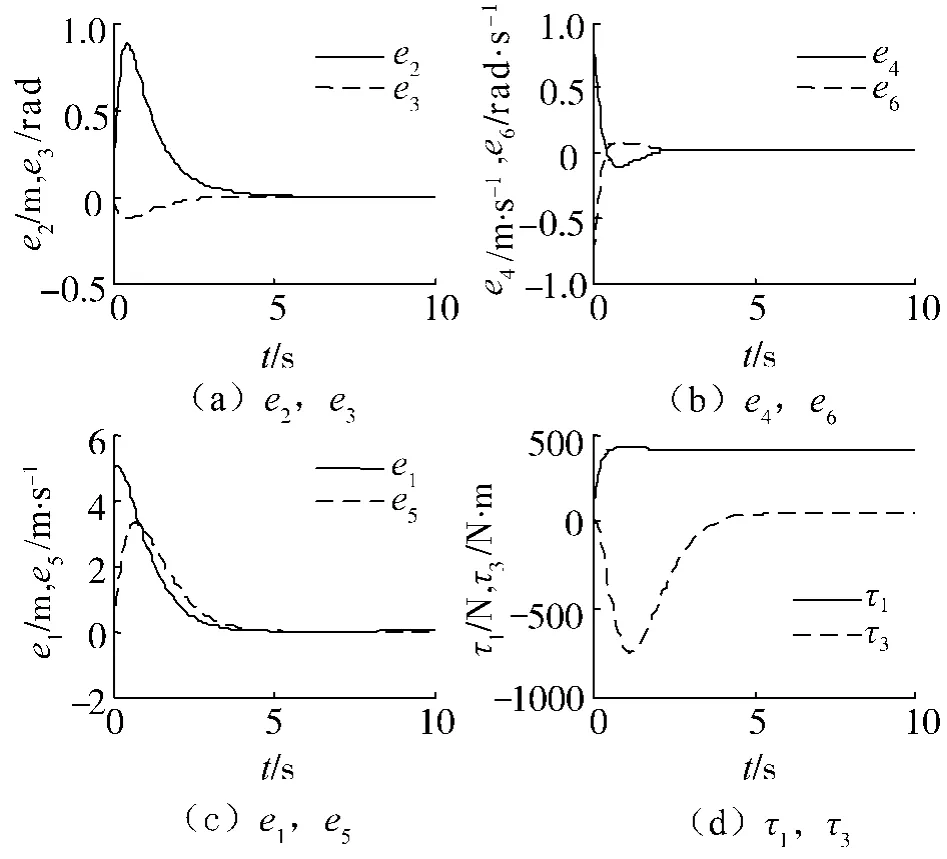
图5 误差渐进收敛曲线和控制输入2Fig.5 Convergence of the error states and control inputs

图6 系统状态跟踪曲线2Fig.6 Response of and ψ,x,y and u,v,r

图7 欠驱动船舶水平面的跟踪航迹2Fig.7 Traces of underactuated surface vessel
以上仿真结果表明,本文所提出的控制规律可以有效的跟踪曲线航迹,跟踪效果也较为理想.
4 结束语
通过全局微分同胚和反馈变换,对变换后的级联误差系统运用反步法和Lyapunov直接方法构造了欠驱动水面船舶的曲线航迹跟踪控制律,可同时实现航速、侧移和位置的同步跟踪.仿真结果表明本文所提出的控制律可有效解决欠驱动船舶的曲线航迹跟踪问题.
[1]MA Baoli.Global k-exponential asymptotic stabilization of underactuated surface vessels[J].Systems & Control Letters,2009,58:194-201.
[2]林壮,朱齐丹.基于遗传优化的水平欠驱动机械臂分层滑模控制[J].控制与决策,2008,23(1):99-102.
LIN Zhuang,ZHU Qidan.Hierarchical sliding mode control for horizontal underactuated manipulators with optimization based on GA[J].Control and Decision,2008,23(1):99-102.
[3]JIANG Z P.Global tracking control of underactuated ships by Lyapunov's direct method[J].Automatic,2003,38(2):301-309.
[4]韩冰,赵国良.基于微分平滑的欠驱动水面船舶航迹控制[J].哈尔滨工程大学学报,2004,25(6):709-713.
HAN Bing ,ZHAO Guoliang.Path tracking control of underactuated surface vessels based on the differential flatness[J].Journal of Harbin Engeering University,2004,25(6):709-713.
[5]JIANG Z P.Robust global stabilization of underactuated ships on a linear course:state and out-put feedback[J].International Journal of Control,2003,76(1):1-17.
[6]李铁山,杨盐生.基于耗散理论的不完全驱动船舶直线航迹控制设计[J].应用科学学报,2005,23(2):204-207.
LI Tieshan,YANG Yansheng.A robust design based on dissipation theory for the linear-course trajectory control of underactuated ship[J].Journal of Applied Sciences,2005,23(2):204-207.
[7]周岗,姚琼荟,陈永冰,等.不完全驱动船舶直线航迹控制稳定性研究[J].自动化学报,2007,33(4):378-383.
ZHOU Gang,YAO Qionghui,CHEN Yongbing,et al.A study of stability of straight-line tracking control system for underactuated ship[J].Acta Automatica Sinica,2006,33(4):378-383.
[8]周岗,姚琼荟,陈永冰,等.一类船舶直线航迹控制系统全局渐近稳定的充分条件及推论[J].自动化学报,2007,33(11):1204-1207.
ZHOU Gang,YAO Qionghui,CHEN Yongbing,et al.Suffient conditions of global asympototic stability and deductions for ship's straight-line tracking control systems[J].Acta Automatica Sinica,2007,33(11):1204-1207.
[9]FOSSEN T I.Guidance and control of ocean vehicles[M].Upper Saddle River,New York:Wiley Interscience,1994.
[10]KHALIL H K.Nonlinear Systems[M].3rd ed.New Jersey:Prentice-Hall,2002.
