基于转角的商用车电动助力转向回正控制研究
2011-06-05刘晶郁李耀华
刘晶郁,王 涛,虎 忠,李耀华
(长安大学 汽车学院,陕西 西安 710064)
转向系统的回正特性是汽车操纵稳定性能中一个非常重要的指标。根据司机驾驶经验,当车辆低速行驶时,转向系统回正力矩较小时,转向盘有可能出现回正不足的情况;当车辆高速行驶时,转向盘可能会出现回正超调的情况。因此,在EPS系统中消除回正过程中可能出现的回正不足和回正超调显得尤为重要。
论文提出基于转向盘绝对角度位置参考的回正控制方法,采用转角传感器[1]测量的转向盘实际转角作为回正控制器的输入变量,通过PID方式[2]调节并获取回正目标电流。该方法克服了传统经验公式[3]估算转向盘转角误差较大、控制不精确的缺点,大大提高了回正控制的精确性。
1 转向盘角度测量原理
转向盘转角可以通过BI公司的扭矩-位置复合传感器LH3得到,该传感器可同时测量转矩和转角信号,其转角测量原理如图1所示。
信号P1和P2相位相差90°,信号P3用来检测转向盘转动圈数,将这3个信号结合起来就能唯一确定此时方向盘的绝对转角,通过A/D转换后输入单片机相应端口即可为回正控制提供转角依据。

图1 转角传感器信号输出(P1,P2,P3)Fig.1 Angle sensor signal output(P1,P2,P3)
2 回正控制器的开发
2.1 回正控制的原理
ECU根据输入的车速信号、转矩信号和转向盘转角信号进行转向控制模式判断,当检测结果符合回正控制条件时,电动助力转向系统便进入回正控制模式。回正控制原理如图2所示。

图2 回正控制原理图Fig.2 The principle diagram of return-to-center control
2.2 回正控制器结构及控制策略
笔者设计的回正目标电流控制器采用角度伺服控制,根据预先设定的角度参考值(+5°C)和实测转角的偏差,经PID方式计算得到回正目标决策电流[4-5],回正控制器结构如图3所示。

图3 回正控制器结构Fig.3 The structure of aligning controller
回正目标电流如式(1)所示:

式中:Kp′为控制器比例系数,Ki′为控制器积分系数,Kd′为控制器微分系数,θk为转向盘的实际转角,θ˙k为转向盘的转角速度。
低速回正过程中,为了得到较大的回正力矩,避免回正不足,采用比例-积分(PI)调节,输出回正目标电流,此时式(1)简化为:

高速回正过程中,回正力矩较大,为了避免回正超调,采用比例-微分(PD)控制得到回正目标电流,避免摆振,此时K′i=0,式(1)简化为:

通过调节 PID 参数 Kp′、Ki′、Kd′, 即可获得不同效果的回正控制方式。
2.3 回正控制器的软件设计
回正控制器控制子程序流程如图4所示。
根据转向角度的判别,首先确定是左回正还是右回正,继而判断转向盘角度θk和角速度θ˙k的乘积是否小于零,当二者乘积满足小于零的条件时,系统便进入回正控制模式,进行回正控制,施加回正力矩使转向盘回到初始中心位置。
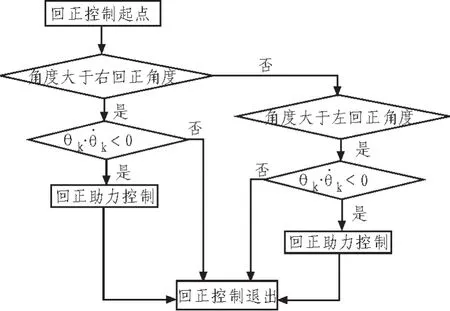
图4 回正控制子程序流程Fig.4 Flow chart of the return-to-center progress
3 回正控制器建模与仿真
3.1 回正控制器的模型建立
根据以上理论分析,运用Simulink仿真软件,建立了该回正控制器的仿真模型[6],如图5所示:

图5 EPS系统回正控制器仿真模型Fig.5 The controller simulation model of EPS system
车辆低速转向回正时,采用比例-积分(PI)控制器来得到低速回正目标电流,仿真模型如图6所示:
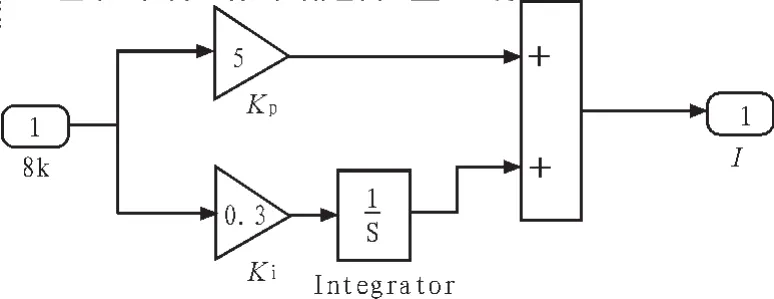
图6 PI控制器仿真模型Fig.6 The PI controller model
车辆高速转向回正时,采用比例-微分(PD)控制器得到高速回正目标电流,仿真模型如图7所示:

图7 PD控制器仿真模型Fig.7 The PD controller model
3.2 仿真结果分析
模拟商用车以20 km/h的车速和80 km/h的车速行驶,驾驶员施加在转向盘上10 N·m转矩后释放,转向盘的回正
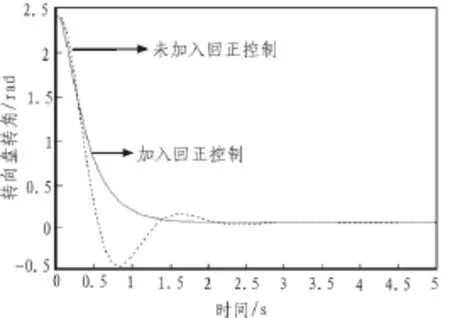
图8 低速回正时转向盘响应特性Fig.8 The slow speed response

图9 高速回正转向盘响应特性Fig.9 The high speed response
由图8所示曲线可以看出,在低速回正时,EPS系统未加入回正控制时,转向盘回正时间约为3 s;加入回正控制以后,转向盘回到中间位置的时间约为2 s,提高了回正性能。
同理,由图9曲线可以看出,高速回正时,EPS系统中未加入回正控制时,转向盘回正时间约为3 s,并且回正过程中有高频振荡;加入回正控制后,转向盘回到中间位置的时间缩短为1.5 s,并可有效地抑制转向盘的摆振现象。
4 结 论
1)开发了一种基于转向盘转角的回正目标电流控制器,该控制器采用PID控制方式获取回正目标电流,使转向盘能够准确快速回位。
2)运用Simulink仿真软件搭建了该回正控制器仿真模型,通过低速回正和高速仿真实验验证了该控制器具有良好的回正特性,并可有效地抑制汽车高速行驶转向过程中的转向盘的摆振现象,改善汽车的操纵稳定性。
[1]JI-HOON K,JAE-BOK S.Control logic for an electric power steering system using assist motor[J].Mechatronics, 2002,12(3):447-459.
[2]于建成,宋振环.基于PID控制策略的汽车电动助力转向系统助力[J].河北理工学院学报,2005, 27(2):129-132.YU Jian-cheng,SONG Zhen-huan.Research on the assisted power of EPS system based on PID control strategy[J].Journal of Hebei Polytechnic University, 2005, 27 (2):129-132.
[3]徐建平,何仁,苗立东,等.电动助力转向系统回正控制算法研究[J].汽车工程,2004, 26(5):557-559,541.XU Jian-ping, HE Ren, MIAO Li-dong,et al.A study on returnability control algorithm for electric power steering system[J].Automotive Engineering, 2004, 26 (5):557-559,541.
[4]刘方.电动助力转向系统控制策略的研究[D].长春:吉林大学,2006:30-55.
[5]景立群,季学武.电动助力转向系统的主动回正控制[J].汽车技术, 2008(9):9-12.JING Li-qun,JI Xue-wu.Active return-to-center control of an electric powered steering system[J].Automobile Technology,2008(9):9-12.
[6]施国标,申荣卫,林逸.电动助力转向系统的建模与仿真技术[J].吉林大学学报:工学版,2007, 37(1):31-36.SHI Guo-biao, SHEN Rong-wei, LIN Yi.Modeling and simulation of electric power steering system [J].Journal of Jilin University, 2007,37(1):31-36.