管道顶进姿态控制技术在东月路机械顶管工程中的应用
2011-05-28陈晓鹏
田 琨 陈晓鹏
(西安市市政设施管理局,陕西 西安 710016)
随着城市基础建设的高速发展,顶管施工技术作为一种快速、经济的非开挖的隧道施工技术,被越来越多的应用于工程建设当中。地下顶管施工技术已由早先的人工手掘式顶管发展到机械顶管施工技术。工程实践中,随着一次顶进距离的不断刷新,管道埋深的越来越深,加之不同地质条件的复杂多样,顶进姿态控制作为顶管控制技术的重要内容,正是值得人们重视和考虑的紧迫课题。
1 工程概况
西安市东月路顶管工程设计雨水主干管道自西向东沿东月路敷设,主线管道设计管径D3000mm,埋深16-32米,管道长度2863米,全线共设有检查井6座,出水口1处。施工主要采用土压平衡顶管施工技术,单向顶进距离220-610米。管道顶进区间地层结构为湿陷性黄土和砂砾石、砂层等多种地质结构。
2 顶进前准备工作
在机械顶管施工中,顶管机初始姿态控制对于管道的成功顶进具有非常重要的意义,因此在顶管机进洞前应做好充分的准备工作。
2.1 进洞前的导轨检查验收
主要内容包括,基坑内导轨的高程、中线、导轨安装是否牢固。
2.2 调整好顶管机进洞前的姿态,及时记录各种仪表的初始值顶管机进洞前记录各种仪表初始数值。记录的范围包括:前倾斜仪、后倾斜仪、土压力计读数、纠偏油缸的初始值、电压表、电流表等。
3 进洞控制
3.1 安装延伸导轨
为了克服由于顶管机自身重量造成的顶管机在初始进洞时的 "磕头"现象,制作延伸导轨,延长顶管机进洞支撑长度,减缓顶管机进洞"磕头"的趋势。图1为延伸导轨制作示意图
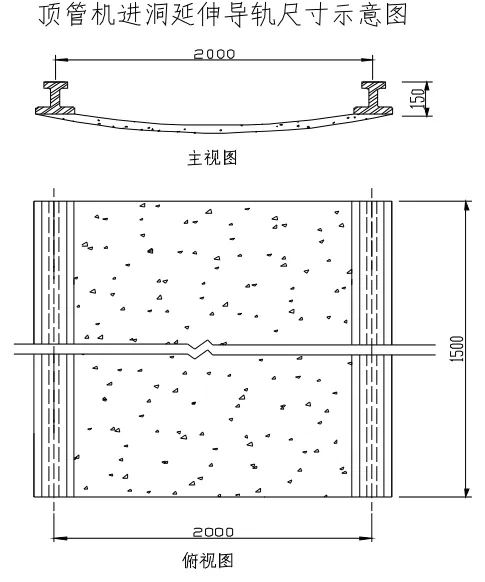
图1 延伸导轨制作示意图
破除预留洞口的混凝土和围护桩,将延伸导轨与围护桩破除后露出的钢筋进行焊接,再在周围浇筑混凝土对延伸导轨进行加固,保证其具备一定的刚度和承载力。延伸导轨安装应注意以下事项:
1 延伸导轨安装时,应当重视延伸导轨与止水圈保持的距离不得小于100mm,防止顶管机在进洞过程中,损坏止水圈。
2 延伸导轨的间距和坡度应与顶管坑的导轨保持一致。
3 延伸导轨一般为1.5m左右,太短、太长都不会起到应有的作用。
4 延伸导轨应安装牢固,防止在顶进过程中松动、脱落,影响正常的顶进施工。
4 顶进过程姿态控制
4.1 调整顶管机的进洞姿态
顶管机在进洞过程中,当顶管机距离刀盘2.3m(重心)部位经过延伸导轨的最末端时,操作人员应将顶管机下面2组纠偏油缸缓慢伸出,伸出行程以前倾斜仪角度不大于1°为宜;在顶管机整体越过延伸导轨时,及时根据测量结果对纠偏油缸及时进行调整。(预留抛高:2000×sin1°=34.9mm)
4.2 安装"机头管"
顶管机在软弱地层、地层突变或顶力卸载的过程中,顶管机容易与后续的管材松脱或脱离,造成顶进的偏差和顶进质量事故。在机械顶管施工时,采用"机头管技术"。
机头管技术是指顶管机在顶进过程中,将其与后续的若干特制混凝土管(俗称机头管)通过一定的方法进行加固和连接,使其与机头管形成整体,防止顶管机发生漂移和松脱,减少顶管机刀盘在切削土体的过程中产生的旋转,同时在顶进过程中具有导向作用。
"机头管"与其他混凝土管在主要区别就在于,"机头管"在制作的过程中沿管内壁预埋两块宽度为300mm,厚度为5mm的钢板。
当顶管机长度的75%(约3.9m)被顶进后,暂停顶进施工,及时安装"机头管"。顶管机与"机头管"通过呈60°夹角布置的六根?32mm的钢筋焊接,在前端与顶管机连接处通过螺丝进行紧固,使顶管机与前两节"机头管"连成一体,防止顶管机在顶进过程中可能产生的漂移现象;同时"机头管"与顶管机连成一体,强化了顶进的导向作用。"机头管"的安装见图 2、3。

图2 安装中的"机头管"

图3 顶管机与"机头管"的连接
4.3 测量纠偏控制
顶管施工中对顶进管道的水平轴线和高程要进行实时跟踪测量控制,必要时进行纠偏控制。
4.3.1 顶进轴线测量控制
在工作井内管道顶进轴线方向上架设一台激光经纬仪,激光经纬仪经过人工的测量和计算,发出一束与管道设计轴线和管道坡度一致的激光直接打到机械顶管机测量光靶上,由于顶管机和管节在顶进时都在不断的向前移动,这束激光在顶管机和管节移动的同时跟踪测量光靶,这样根据偏差偏差数据来进行适当的反向纠偏。
4.3.2 顶进高程测量控制
高程测量由工作井下水准点测量出各管节高程,再计算出各管节实际高程是否与设计高程相符,根据实际高程与设计高程的偏差分析偏差产生的原因及趋势,再根据激光经纬仪在测量光靶上反映的激光相比较,确定管道高程趋势,进行相反方向的纠偏。
4.3.3 纠偏条件及纠偏方法
一般在机械顶管施工中,使用液压纠偏油缸作为纠偏装置。纠偏油缸一般分布于顶管机内四个方位,呈90°布设。每组纠偏油缸由具有相同数量的油缸组成。纠偏油缸一般为大吨位、短行程,同时带有液压锁。
⑴纠偏条件
顶管机轴线偏离设计轴线30%时,开始进行纠偏作业。一般情况下,顶管机没有偏离轴线的趋势时,不予以纠偏。
⑵纠偏方法
①小角度纠偏,每次纠偏角度不大于0.5°。
②纠偏过程应保持平稳,不能大起大落。偏离设计轴线较大时,采用连续小角度纠偏,按照一定的轨迹和曲率半径不断调整到设计轴线。避免纠偏角度过大、幅度太猛产生的侧应力,造成顶进困难、地面变形等质量事故。
③利用测量成果,绘制管道走势图,提前预判顶管机的走势进行控制。
4.3.4 在机械顶管施工中,还存在一种情况需要纠偏,就是全断面刀盘式顶管机在刀盘的带动下发生了旋转。
此类旋转不仅会影响作业面的工作,同时还有可能会引起顶管机局部重量的变化,而导致顶管机的趋势发生变化。如果顶管机发生的旋转角度过大的话,将会给顶进工作带来更大的困难。对于顶管机的旋转,一般在顶管机内靠近光靶处,放置一把水平尺,通过在顶进过程中观察顶管机的旋转情况并及时进行调整。
5 结语
顶进姿态控制技术的发展应用,对更精确地实现复杂地质长距离顶管具有重要意义。随着各种新技术、新材料、新工艺的不断出现,顶进姿态控制技术将会取得新的进展。
[1]《大型地下顶管施工技术原理及应用》.中国建筑工业出版社.韩选江.
[2]《现代顶管施工技术及工程实例》.中国建筑工业出版社.葛金科,沈水龙,许烨霜编著.
