四旋翼飞行器无刷直流电机调速系统的设计
2011-05-21钟疏桐
孟 磊 ,蒋 宏 ,罗 俊 ,钟疏桐
(1.武汉理工大学 自动化学院,湖北 武汉 430070;2.武汉理工大学 信息工程学院,湖北 武汉 430070)
近年来,无人机(Unmanned aerial vehicle,UAV)的研究和应用广泛受到各个方面的重视。四旋翼飞行器作为UAV的一种,能够垂直起落、空中悬停、可适用于各种飞行速度与飞行剖面[1],具有灵活度高、安全性好的特点,适用于警务监控、新闻摄影、火场指挥、交通管理、地质灾害调查、管线巡航等领域实现空中实时移动监控。
四旋翼飞行器的动力来源是无刷直流电机,因此针对该类无刷直流电机的调速系统对飞行器的性能起着决定性的作用。为了提高四旋翼飞行器的性能,本文设计制作了飞行试验平台,完成了直流无刷电机无感调速系统的硬件、软件设计。通过试验证明该系统的设计是可行的。下运动;相反的改变中心对角的螺旋桨的速度,可以产生滚动、俯仰等运动。
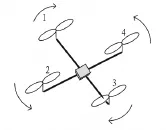
图1 四旋翼飞行器结构示意图Fig.1 Structure of the quadrotor
1 四旋翼飞行器平台结构
四旋翼微型飞行平台呈十字形交叉,由4个独立电机驱动螺旋桨组成,如图1所示。当飞行器工作时,平台中心对角的螺旋桨(如1与3)转向相同,相邻的螺旋桨(如 1与 2)转向相反。同时增加减小4个螺旋桨的速度,飞行器就垂直上
四旋翼飞行器的控制系统分为两个部分,飞行控制系统与无刷直流电机调速系统。飞行控制系统通过IMU惯性测量单元(由陀螺传感器与加速度传感器组成)检测飞行姿态,通过无线通信模块与地面遥控器通信。4个无刷直流电机调速系统通过I2C总线与飞行控制器通信,通过改变4个无刷直流电机的转速来改变飞行姿态,系统采用12 V电池供电,控制系统结构图如图2所示。
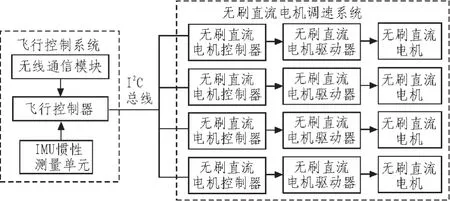
图2 四旋翼飞行器控制系统结构图Fig.2 Structure schematic of the quadrotor control system
2 无刷直流电机调速系统
无刷直流电动机既具有运行效率高、调速性能好,同时又具有交流电动机结构简单、运行可靠、维护方便的优点,是电机主要发展方向之一,现已成功应用于军事、航空、计算机、数控机床、机器人和电动自行车等多个领域[2]。在该四旋翼飞行器上使用了新西达2217外转子式无刷直流电机,其结构为12绕组7对磁极,典型KV值为1 400。
通常无刷直流电机的控制方式分为有位置传感器控制方式和无位置传感器控制方式。有位置传感器控制方式通过在定子上安装电磁式、光电式或者磁敏式位置传感器来检测转子的位置,为驱动电路提供换向信息。无位置传感器的控制方式有很多,包括磁链计算法、反电动势法、状态观测器法、电感法等[3]。在各种无位置传感器控制方法中,反电动势法是目前技术为成熟、应用最广泛的一种位置检测方法。本系统采用的反电动势过零检测法是反电动势法中的一种,通过检测各相绕组反电动势的过零点来判断转子的位置。根据无刷直流电机的特性,电机的最佳换向时刻是相反电动势过零点延迟30°电角度的时刻,而该延迟的电角度对应的时间可以根据两次过零点时间间隔计算得到。
3 无刷直流电机调速系统硬件设计
该无刷直流电机调速系统由三相全桥驱动电路、反电势过零检测电路、电流电压监测电路组成电机驱动器。使用一片ATmega8单片机作为控制器,该单片机内部集成了8 kB的Flash,最多具有23个可编程的I/O口,输出时为推挽结构输出,驱动能力较强。片上集成了AD转换器、模拟比较器、通用定时器、可编程计数器等资源。
3.1 三相全桥驱动电路设计
三相全桥驱动电路利用功率型MOS管作为开关器件,选用P型MOS管FD6637与N型MOS管FD6635搭配使用,设计容量为允许通过的最大电流为30 A。FD6637的开关利用三极管9013进行驱动、FD6635的开关直接利用单片机的I/O口驱动。电路如图3所示。通过R17、R19、R25来减少下管FDD6635的栅极充电电流的峰值,防止震荡并且保护MOS管;R16、R23、R24作为下拉电阻,保证下管的正常导通与关断;R2、R5、R8作为上管栅极的上拉电阻,阻值选择 470 Ω,既保证了MOS管的开关速率不降低,同时也防止三极管Ic电流过大。A+、B+、C+提供驱动桥的上桥臂的栅极导通信号,分别通过ATmega8单片机的3个硬件PWM通道驱动[4],通过改变PWM信号的占空比来实现电机调速;A-、B-、C-提供下桥臂栅极的驱动信号,由单片机的I/O口控制,只有导通与关闭两种状态。
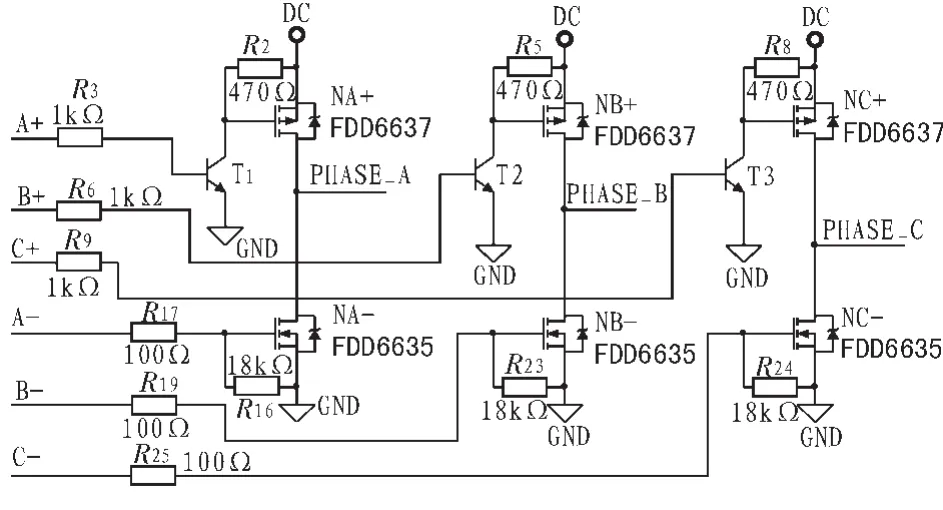
图3 三相全桥驱动电路图Fig.3 Circuit of three-phase bridge driver
3.2 反电动势过零检测电路设计
电机运行时,同一时刻只有两相绕组导通,另外一组绕组悬空,切割磁感线生成反电动势。反电动势过零点指其绕组端电压等于三相绕组的中点电压,因此通过非导通相绕组的端电压与三相绕组的中点电压比较,就能得到过零点信号。但是电机三相绕组的中点连线未引出,采用三个阻值相同、星型连接的电阻虚拟得到中点电压。如图4所示,N点为虚拟中点电压[5],UA、UB、UC为衰减后的电机相电压接单片机的AD0~AD2通道。利用ATmega8内部的模拟比较器实现过零比较,N接比较器的正向输入端,该模拟比较器的负向输入端可以通过软件配置选择片内AD转换器的AD0~AD2通道,用单比较器实现三相电压比较。
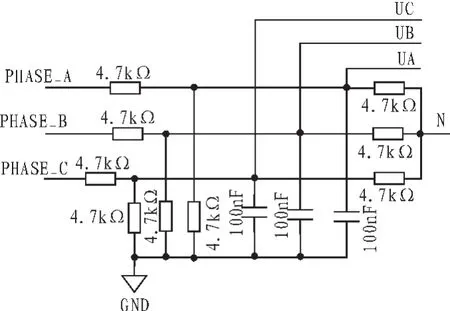
图4 反电动势过零检测电路图Fig.4 Circuit of back-EMF voltage detection
3.3 电流电压监测电路设计
电流电压监测电路用来监测无刷直流电机驱动电路的总电流与系统供电电池电压的值。电路如图5所示,利用康铜丝构成阻值为0.01 Ω的电阻,总电流流过该电阻形成的电压经过R11与C8组成的截止频率为2.3 kHz的一阶低通滤波器后连入单片机的AD3端口,通过计算可得系统电流。电压检测电路通过简单电阻分压的形式将系统电池供电电压调整到AD转换器的量程范围内。通过电流电压监测防止因为故障发生时电流过大导致设备烧毁,也防止飞行器升空后由于电池电压不足摔毁。
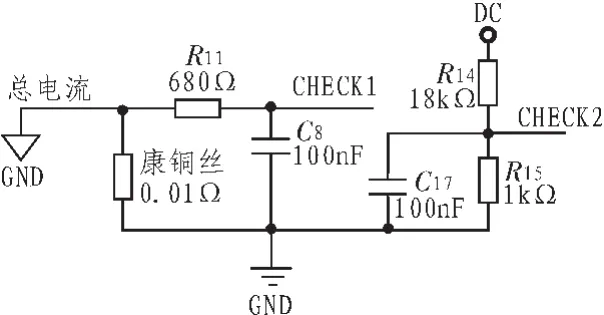
图5 电流电压监测电路图Fig.5 Circuit of current and voltage detection
4 无刷直流电机调速系统软件设计
该无刷直流电机调速系统应用于四旋翼飞行器上,电机的转速与飞行器的升力之间没有确定的关系,而且受电机参数、螺旋桨结构与尺寸影响很大,因此该电机调速系统对电机调速的精度要求不高。飞行姿态的控制则是通过机载IMU惯性测量单元与该调速系统结合形成负反馈系统完成的,调速系统控制器通过I2C总线与飞行控制器通信,接收PWM占空比信号值。飞行姿态的调整在本文不做研究,因此该调速电路只要实现开环调速即可满足性能要求。该系统软件流程图如图6所示。
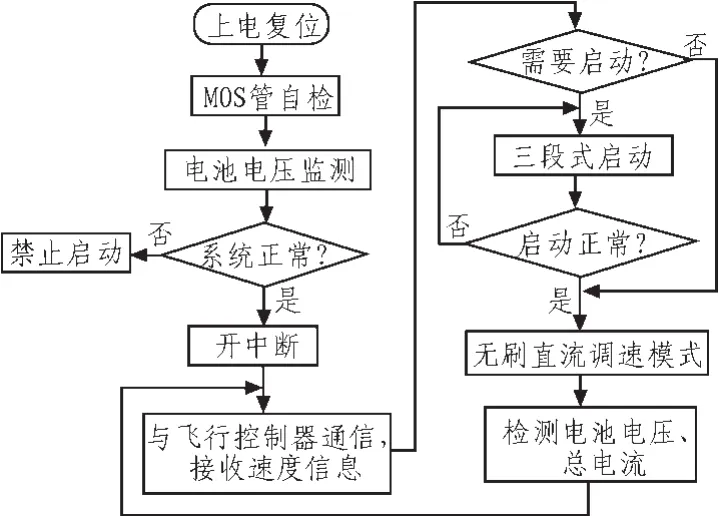
图6 系统软件流程图Fig.6 Flow chart of system
4.1 电机启动程序设计
该直流无刷电机调速系统的驱动采用软件启动方式。直流无刷电机在静止或者低速运行的时候,非导通相反电动势为零或者极低,不利于测量,难以实现电机的自启动[6]。本设计采用三段式启动方法:首先给AB相通较低电压较长时间实现电机转子的预定位,其次根据估测的换相时间换相逐步提高电压缩短通电时间,最后检测反电动势过零点信号是否正常,正常后转入无刷直流电机运行状态。期间检测系统总电流值,若超过20 A则产生中断信号并关断所有MOS管,启动失败,重新启动。
4.2 电机调速控制程序
当电机自启动以后,则进入无刷直流电机无传感器运行状态。选择相应的未导通相,设置模拟比较器相应的输入通道,打开比较器中断,进行反电动势检测,并且记录中断响应时刻,计算相邻两次换向时间差,计算换向延迟30°电角度需要的时间,等待换相。电机速度的调整通过PWM信号的占空比来进行调节。
4.3 电机保护程序设计
为了防止电机堵转、控制信号故障、硬件驱动电路故障引起的电流过大烧毁电机,设计了保护程序。首先系统上电时会检测系统电池电压是否在额定范围内,如果电池电压低于10 V,则关闭所有MOS管,禁止启动飞行。若电池电压正常则进行MOS管短路检测,首先全部关断所有MOS管检测系统漏电流是否在安全范围内,然后依次导通每个MOS管,关闭其他MOS管,检测系统电流,如果远大于系统漏电流则表明有MOS管被击穿,停止启动。如果MOS管自检全部通过则进入正常启动程序。正常工作中监测系统总电流,若电流超过20 A则进入保护状态,产生中断信号并关断所有MOS管。
5 系统测试
经过调试,此方案下实现的四旋翼飞行器无刷直流电机调速系统能够满足要求。用安捷伦6054示波器观测该电机调速器控制新西达2217无刷直流电机空载运行时的三相绕组相电压波形,图7所示PWM占空比为50%时的波形。经测量系统设置电机为最高转速时系统总电流低于7 A,电机没有发热现象。
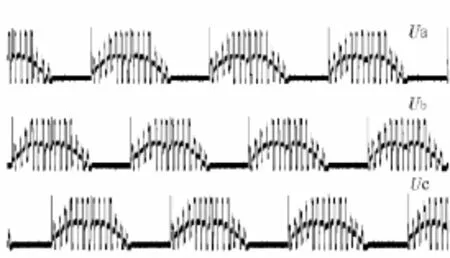
图7 PWM占空比为50%时三相电枢电压Fig.7 Waveform figure of armature voltage(50%PWM)
6 结束语
针对四旋翼飞行器的要求设计了该款基于ATmega8单片机的无刷直流电机调速系统,采用反电动势过零检测法实现无传感器控制,完成了硬件设计与软件调试,同时设计了电机保护策略,尽可能保证系统的安全。经试验证明,该系统能够正常驱动无刷直流电机,为四旋翼飞行器提供动力来源。
[1]岳基隆,张庆杰,朱华勇.微小型四旋翼无人机研究进展及关键技术浅析[J].电光与控制,2010(10):46-52.YUE Ji-long, ZHANG Qing-jie,ZHU Hua-yong.Research progress and key technologies of micro quad-rotor UAVs[J].Electronics Optics& Control.2010(10):46-52.
[2]宋慧滨,徐申,段德山.一种直流无刷电机驱动电路的设计与优化[J].现代电子技术,2008(3):122-124.SONG Hui-bin, XU Shen, DUAN De-shan.Design and optimization for a brushless DC motor drive circuit[J].Modern Electronics Technique,2008(3):122-124.
[3]何昱.基于无刷电机的航模系统的研究 [D].武汉:武汉理工大学,2008.
[4]戴敏,曹杰,史金飞.航模直流无刷无感电机调速控制系统设计[J].测控技术, 2006(7):30-33.DAI Min, CAO Jie, SHI Jin-fei.Design of a speedadjustment control system for senseless brushless DC motor[J].Measurement& Control Technology, 2006(7):30-33.
[5]刘大文,付少锋,黄胜.基于C8051f310设计的无感无刷航模控制器[J].科学技术与工程,2007(20):5392-5395.LIU Da-wen, FU Shao-feng, HUANG Sheng.Design and implementation of sensorless BLDC aeromodelling controller based on C8051f310 [J]. Science Technology and Engineering, 2007(20):5392-5395.
[6]李强,林明耀,李海文,等.无传感器无刷直流电机控制系统及其起动分析[J].微电机伺服技术,2003(3):33-35.LI Qiang,LIN Ming-yao, LI Hai-wen, et al.Control system of sensorless BLDCM and analysis of start process[J].Micromotors Servo Technique,2003(3):33-35.