基于simulink的V2G充放电机建模与仿真
2011-05-21杨伟新
杨伟新,黄 梅
(北京交通大学 电气工程学院,北京 100044)
目前,随着智能电网项目的启动和大规模建设充电站规划的实施,V2G(Vehicle to Grid)正成为研究热点。V2G是指电动汽车作为移动储能单元在受控状态下实现与电网的能量和信息的双向交换功能。文献[1]对V2G的可行性进行了详细分析。
根据文献[1]的描述,具有V2G功能的充电站应实现调频、调峰和应急电源3项基本功能。 文献[2]提出了一种电动汽车充放电系统模型,但是这种模型功能单一,只能并网运行运用于电动汽车电池充放电维护,满足不了文献[1]介绍的具有V2G功能充电站的应用。
笔者在文献[1]的基础上对文献[2]提出的充放电系统进行了改进和完善,建立了能够实现充电站调频、调峰和应急电源3项基本功能的充放电机仿真模型。

图1 充放电机的拓扑结构Fig.1 The topology of bi-directional charger
1 V2G充放电机的拓扑结构
为实现能能量的双向流动和各个功能,主电路的拓扑由无隔离双向半桥DC/DC结构和以IGBT为开关管的三相桥式结构组成,如图1所示。充放电机的交流测与三相电网或重要负荷连接,直流侧与电动汽车连接。
直流变换部分是无隔离双向半桥DC/DC结构。放电时VT2处于常断状态,VT1处于开关状态,相当于BOOST变换器。通过控制VT1的通断调节占空比来控制输出电压。充电时VT1处于常断状态,VT2处于开关状态,相当于BUCK变换器,这一结构可以灵活的根据充电的具体要求转换控制方式,实现控制输出电压或电流的目的。该结构具有使用元件少、体积小、效率高的优点。
交直变换部分是以IGBT为开关管的三相桥式结构。传统的相控桥式电路虽然在过去数十年中,为满足不同的工作应用场合已经起到了不可或缺的作用,但是传统的变换方法存在若干问题,如:功率因数低,使得线路损耗较大;注入电网的谐波过大,产生电磁干扰等。为解决这些问题并适应这些,采用以全控器件作为开关管的三相桥式拓扑结构成为趋势。这种结构可以通过PWM控制方便的实现AC/DC、DC/AC的转化。与传统的相控整流电路相比,此结构还具有体积小、重量轻和动态响应速度高的优点。
2 控制模型的建立
2.1 总体控制模型
充放电机模型全部采用simulink模块塔建,根据V2G充放电机的功能,控制部分主要分为恒流控制、BUCK恒压控制、BOOST恒压控制、电流电压双闭环控制、电压PID控制和功率电流双闭环控制6个子模块。各个阶段的功能由不同的子模块组合完成,根据指示完成各个功能的转换。

表1 控制子模块功能分布Tab.1 The distribution of the control submodule
2.2 交直变换控制部分
在充电整流阶段,电能从电网经过PWM整流桥,PWM的控制采用为达到功率因数正弦波电流的双闭环控制。电流内环的作用是按电压外环输出的电流指令进行电流控制,为了达到较快的电流跟随性能,本文按典型Ⅰ型系统设计电流PI调节器。电压外环的作用是控制三相PWM整流器的直流侧电压,应着重考虑电压环的抗扰性能,因此按照典型Ⅱ型系统设计电压外环PI调节器。
实现调峰、调频功能时充放电机与电网并联通过调节电流可以实现调节输出功率的目的,所以采用直接电流跟踪控制,使用功率电流双闭环控制。电流内环是按功率外环输出的电流指令进行电流控制,功率外环的作用是稳定输出功率同时根据电压频率,以实现单位功率因数,改善系统的动态响应。
紧急电源功能在电网故障的情况下使用,这是充放电机就失去了电网的电压嵌位作用。所以为了实现一功能时,采用电压环PID控制,实时检测输出电压与指定信号比较,控制输出电压幅值与频率跟踪给定信号。
2.3 直直变换控制部分
为实现充电模式的选择,分别建立恒流和恒压两个不同的控制模块。恒流阶段采用电流跟踪控制占空比,从而控制开关管的通断,控制输出电流恒定在一定值,电流值可根据需要和电池特性选择。恒压控制根据输出电压与输入电压计算占空比,然后根据计算所得占空比实时输出控制脉冲。同时对电池SOC进行监控,实现根据SOC情况切换充电方式,实现恒压恒流组合充电方式。
直直变换部分控制单元根据要求分为3部分,第一部分应用于放电阶段恒压控制单元,第二部分应用于充电阶段的恒压阶段控制单元,第三部分应用在充电阶段的恒流阶段控制单元。放电阶段直直变换部分相当于BOOST变换器,而充电阶段相当与BUCK变换器,所以放电阶段恒压控制单元采用公式(1)计算占空比,充电阶段采用公式(2)。

式中:U0是直流变换器输出电压;Ud是直流变换器输入电压;D是占空比;T是开关周期;toff关断时间;ton是开通时间。
恒压控制子单元分为两部分,如图2所示。第一部分采用前馈控制方法,根据输入的开关管开关频率、DC/DC变换器实测的电池端电压和给定的输出电压计算占空比并输出,计算开关管开通时间Ts和开关周期T。第二部分S2是脉冲波的产生与输出模块,可以根据出入的Ts和T实时控制脉冲的输出。
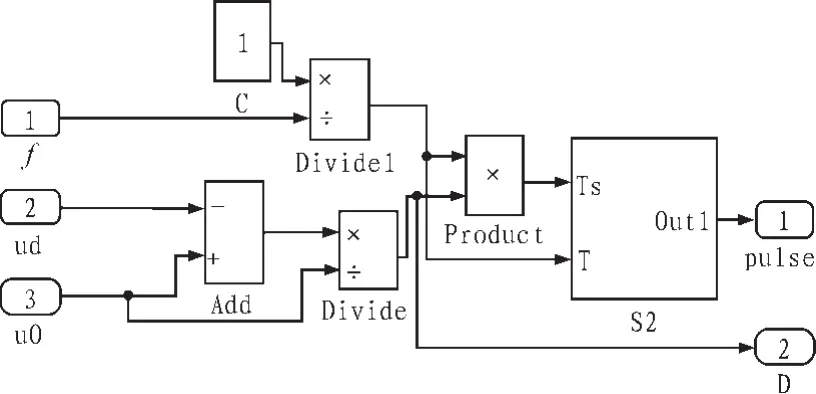
图2 恒压控制子模块图Fig.2 Constant pressure control sub-modular
首先通过S函数计算仿真开始时刻,然后将仿真时刻减去开始时刻的到仿真时间t。Rem函数是一种采用fix函数的取余运算。公式如下:

将t和周期T分别带入rem函数计算t1,t1是在某一个周期内仿真执行的时间。通过t1和导通时间ts的差U判断输出类型,当 U<0时,t1<ts开关管处于导通阶段,输出脉冲 1。 U>0时,t1>ts开关管处于关断阶段,输出脉冲0。将两股信号合并后输出连续脉冲波,控制开关管开断。控制流程如图3所示。
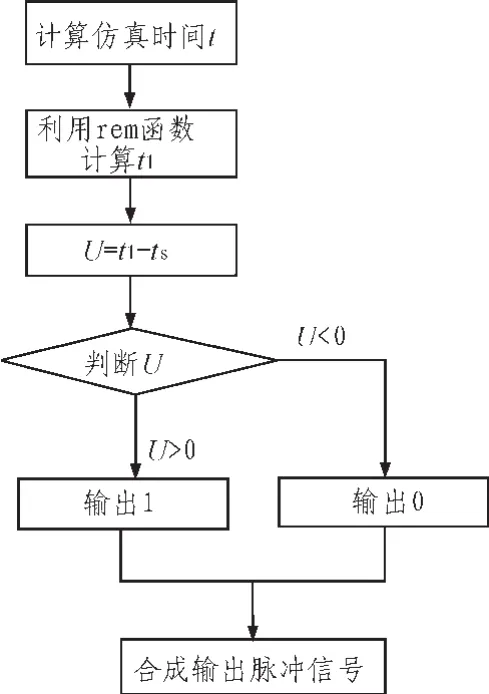
图3 S2控制流程图Fig.3 The control flow chart of S2
3 仿真结果分析
根据分析搭建了实现紧急电源功能的电动汽车充放电机的simulink仿真模型,如图4所示。控制单元主要由BOOST恒压控制和电压PID控制组成。
电动汽车的储能单元采用simulink内部自带的锂离子电池模型(300 V、100 Ah)模拟。标称放电电流为0.4 C时的放电特性,如图5所示。

图4 实现紧急电源功能的simulink仿真截图Fig.4 The picture of simulink model of the function of EPS
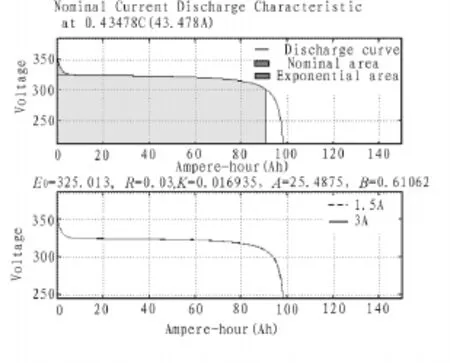
图5 锂电池放电特性Fig.5 The discharge characteristics of lithium batteries
中间平衡电压采用700 V。提高开关管的开关频率可以减小变换器的体积和重量,降低变换器的工作噪音,而一般IGBT的开关频率为20 kHz,所以DC/DC变换的开关频率设为 20 kHz,根据电压纹波系数计算,取 C1=500 μF、C2=200 μF。 根据电流纹波系数和连续临界值计算,取L1=0.1 mL。0.1 s内的仿真结果如图6所示。
设置SOC初始值为80%,根据图5所示电池端电压较长时间平衡在322 V左右,仿真结果可以模拟SOC降到20%时间内充放电机的情况,当SOC低于20%时退出运行。输出中间平衡电压范围是728~737 V,有效值为729.3 V,与设置值的误差为4.1%。根据公式(1)计算占空比值为0.558 4。实测占空比为D=0.538 6-0.539 5,如图6所示。根据设置的输出电压为700 V,占空比的计算值为0.543。与实测D的误差为0.6%~0.8%,与根据实测中间平衡电压计算的占空比误差是2.7%。图7和图8给出了输出三相电压、调制系数M、线电压Uab、相电压Ua波形。Ua的有效值为219.2,与实际值的误差为:0.36%。调制系数经过25 ms达到稳态,稳定值为0.856。对a相线电压进行了谐波分析,如图9所示。总谐波THD=1.68%,符合电网的入网要求。

图6 占空比波形图Fig.6 The waveform of duty cycle

图7 输出三相电压的标么值与调制系数波形图Fig.7 Waveform of the per-unit value of the three-phase voltage and M

图8 线电压Uab滤波前后与相电压Ua波形Fig.8 The waveform of Uabbefore and after filtering and Ua
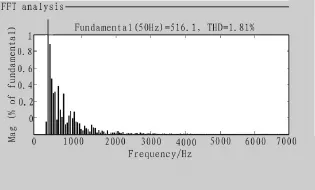
图9 相电压Ua的谐波分析Fig.9 Harmonic analysis of phase voltage Ua
4 结 论
通过分析表明,该模型有很好的动态响应,实测值与计算值误差在允许的范围之内,输出三相波形能很好的跟踪参考波形,谐波含量少,波形平稳波动小,能够实现充放电机作为紧急电源这一功能。只要有足够的容量,完全可以满足用户的要求。
通过对充放电机拓扑结构和控制单元的建模分析,并对其中一种功能仿真,对电动汽车充放电机的模型有了初步认识,为进一步研究奠定基础。
[1]白高平,黄梅.电动汽车作为移动储能单元应用的可行性研究[C]//江苏,2010,10:726-730.
[2]裴晓泽,姜久春,冯韬.电动汽车蓄电池充放电系统的实现[J].电力电子技术,2008(3):18-19.PEI Xiao-ze, JIANG Jiu-chun,FENG Tao.Implementation of battery charge and discharge system in electric vehicle[J].Power Electronic,2008(3):18-19.
[3]Kempton W,Dhanju A,Electric vehicles with V2G[J].Windtech International,2006.
[4]朱永亮,马惠,张宗濂.三相高功率因数PWM整流器双闭环控制系统设计[J].电力自动化设备,2006,26(11):87-91.ZHU Yong-liang, MA Hui, ZHANG Zong-lian.Dual closedloop control for three-phase high-power-factor PWM rectifier[J].Electric Power Automation Equipment,2006,26(11):87-91.
[5]赵振波,李和明.单位功率因数PWM整流器双闭环PI调节器设计[J].电工技术杂志,2003(5):68-71.ZHAO Zhen-bo,LI He-ming.Design of double closed-loop PIregulatorforunitpowerfactorPWM rectifier[J].Electromechanical Journal, 2003(5):68-71
[6]滕乐天,何维国,杜成刚.动汽车能源供给模式及其对电网运营的影响[J].华东电力,2009(10):1675-1677.TENG Le-tian, HE Wei-guo, DU Cheng-gang.Power supply modes for electrical vehicles and their impacts on grid operation[J].East China Electric Power, 2009(10):1675-1677.
[7]张崇巍,张兴.PWM整流器及其控制[M].北京:机械工业出版社,2005.