基于WLAN与单神经元自适应PID的空调系统设计
2011-05-21王志刚高玺广
张 博,王志刚,高玺广,徐 莉
(河北工业大学 信息工程学院,天津 300401)
近几年来,智能建筑[1](Intelligence Building)在我国得到了很大的发展。在智能建筑中,楼宇自控系统(Building Automation System,BAS)占有主导地位,而在楼宇自控系统中空调控制系统扮演着极其重要的角色。本文针对目前空调系统中存在的布线施工周期长、有线网络缺少灵活性且人力物力资源消耗大等问题,结合实际课题,提出了WLAN技术代替原有的RS485总线及Lonworks[2]总线等总线方案,将上位机和现场控制系统构成一个通过无线收发模块传送信息的集散系统,使之减少了布线的环节,增加了系统的灵活性,降低了安装费用,并获得了系统重新布置时的可移动性。针对温湿度大滞后性的特性以及目前传统PID控制难以满足快速性、无超调、无静差、抗干扰和鲁棒性[3]强等多方面的要求,运用了单神经元自适应PID控制算法[4],改善系统的控制性能。
1 空调系统控制原理
控制原理:通过新、回风道内设置的温湿度传感器分别检测新风、回风的温湿度,经过单元控制器的计算比较,确定系统空气处理机的运行工况,并输出相应的信号控制新/回风及排风风阀的开度比例,并调节新回风混合比,达到节能的目的。在风道内设有防冻开关,当风温低于设定温度时,切断风机电路停止风机运行,并通过与新风入口风阀执行器的连锁,关闭新风阀。同时由现场控制器输出报警信号[5]。本文主要研究的是对温湿度的控制问题。
2 硬件设计
本系统包括3大部分:主机(含数据库),现场控制部分和WLAN控制部分,其中硬件设计包括WLAN控制模块的设计和现场控制器及其外围电路设计两部分。WLAN控制模块是该系统的核心部分,负责主机与控制器之间信息的传输。系统结构如图1所示。
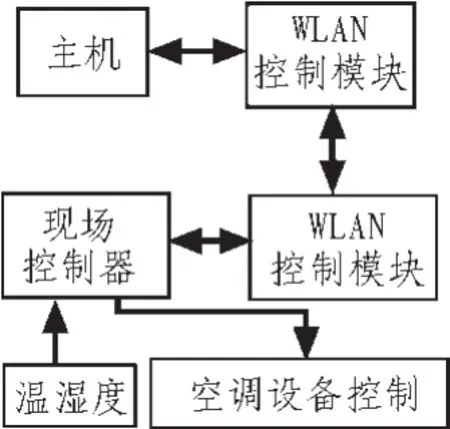
图1 基于WLAN技术的空调系统的结构图Fig.1 Structure diagram of air-conditioning system based on WLAN technology
现场控制部分由带串口(RS232或RS485接口)的控制器及其外围电路、温湿度传感器等组成,从传感器测得的相应数值将定期发送到无线控制模块交主控机处理。控制器采用PID等算法对空调末端组各种阀门进行控制,并负责各采样点的温湿度采样值的显示与上传。
现场控制器的设计主要包括:AT89S52单片机、输入、输出电路,4×4点阵键盘电路,存储器扩展电路,字符液晶或数码管显示电路,掉电保护电路及上下限保护电路等。其结构图如图2所示。
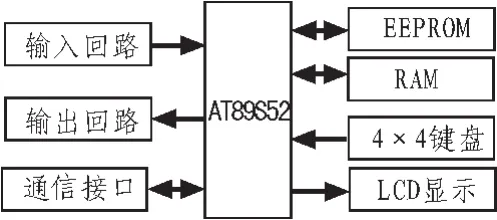
图2 现场控制器的设计框图Fig.2 Design block diagram of field controller
WLAN控制模块的设计:系统中采用ADAM4550无线调制解调模块作为中间数据采集器,ADAM-4550是一款新型直序扩频无线调制解调器。它在 2.4 GHz ISM频段上工作,无须申请执照。它提供了可用于通讯的 RS-232和RS-485接口,通讯速率可达到 115.2 kbps。它使用1 Mbps的广播速率以半双工方式工作。调制解调器具有 100 mW的输出功率。使用其背面的拉杆天线时,可以有150 m的有效传输距离。当使用研华提供的高增益外接支杆式天线时,它的通讯范围有可能超过 20 km(开阔空间)。
3 软件设计
根据系统功能要求,软件设计分为两部分:
现场控制器的软件设计主要由数据采集程序、初始化程序、算法控制运算程序、参数发送及显示程序、故障诊断报警程序等组成。软件功能为实时采集温湿度、设备报警、风机的工作状态等模拟、数字信号,根据控制算法通过控制新回风阀及冷热水的开度大小进行温湿度的控制。
主机控制软件包括数据库(用DELPHI编程[6]),温湿度查询、接收火盗警信号,然后进行相应处理后给下位机即现场控制器发出指令,并对数据进行存档和归表以便查询调用。
4 单神经元自适应PID算法控制
单神经元作为构成神经网络的基本单位,具有自学习和自适应能力,而且结构简单,易于计算。传统的PID调节器也具有结构简单,调整方便和参数整定与工程指标联系密切等特点。将两者结合,可以在一定程度上解决传统PID调节器对一些参数时变系统进行有效控制的不足。
常规PID控制器的控制算法式为

式(1)中为实际值与给定值的偏差,e(t)=yr-y;Kp为比例增益;Ti为积分时间常数;Td为微分时间常数。当采用周期To较短时,离散化后,可得常规PID控制的增量型算式为:

式(2)中ΔU(k)——第K次控制器输出的增量;
ΔE(k)——偏差的一次差分,ΔE(k)=E(k)-E(k-1);
Δ2E(k)——偏差的二次差分,Δ2E(k)=E(k)-2E(k-1)+E(k-2)。
结合以上的常规PID调节器的控制机理,一个基于单神经元模型的自适应PID控制器的结构图如图3所示。
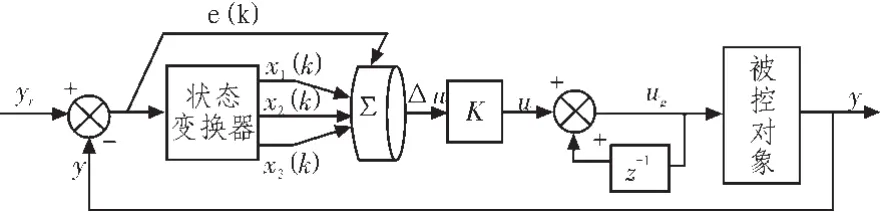
图3 单神经元自适应PID控制结构图Fig.3 Structure diagram of single neuron self-adaptive control
图中状态变换器的输入为系统的输出偏差信号e(k),yr为设定输入,y为过程的实际输出,ri为性能指标或递进信号,K为神经元比例系数,K>0。该单神经元控制器有3个状态变量x1(k)、x2(k)、x3(k),这里分别取为:
xi(k)(i=1,2,3)的这种取法有明显的物理意义:x1(k)反映了系数误差(相当于积分项),x2(k)反映了系统误差的一阶差分(相当于比例项),x3(k)反映了系统误差的二阶差分(相当于微分项)。本文的控制策略如下:

式中u(k)——第k次采样后,神经元的控制输出;wi(k)——对应于xi(k)的加权系数。
将式(3)代入式(4),得:
比较式(2)和式(5),得到

Kw1(k)=分别称为该神经元控制器的积分系数、比例系数、微分系数。
单神经元自适应控制器是通过对加权系数的调整来实现自适应、自学习功能的。考虑到加权系数应和神经元的输入、输出和输出偏差三者的相关函数有关,因此加权系数的调整采用有监督的Hebb学习规则[7],即:

式(6)、(7)中ri(k)——递进信号或学习信号,ri(k)随过程进行逐渐衰减;z(k)——输出误差信号,z(k)=yr(k)-y(k)=e(k);ηi——学习速率,ηi>0。
可以证明当偏差 e(k)充分小时,wi(k)可收敛到某一稳定值w*i,且与期望值的偏差在允许范围内[8]。
为保证上述控制学习算法的收敛性和鲁棒性,对上述学习算法进行规范化处理,得:

式(8)中 x1(k)=e(k),x2(k)=Δe(k),x3(k)=Δ2e(k)=e(k)-2e(k-1)+e(k-2)。
ηI,ηP,ηD——分别为积分、比例、微分的学习速率。 由式(8)可看出,单神经元自适应PID控制器是依据学习信号所反映的误差与环境的变化来对相应的参数进行在线调整,并产生自适应控制作用,这充分体现了其强鲁棒性。
5 结束语
根据以上设计的空调系统,将WLAN技术与单神经元自适应PID控制结合起来,通过工控机实现实时监控,控制效果良好。选择WLAN技术不但减少了布线所需的人力物力的消耗,也增加了系统的灵活性、移动性。同时加上单神经元自适应PID控制,使系统具有无静差、无超调、鲁棒性好等优点。
[1]付晓峰,李楠,付兴武.Lonworks技术与模糊PID控制相结合应用于中央空调系统的研究[J].电气传动自动化,2005,27(2):23-26.FU Xiao-feng,LI Nan,FU Xing-wu.Research on combination of Lonworks technology and fuzzy-PID controller in the central air-conditioning system[J].Electric Drive Automation,2005, 27(2):23-26.
[2]杨育红.Lon网络控制技术及应用[M].西安:西安电子科技大学出版社,1999.
[3]刘利,马劲松,李黎.基于神经元的模糊自适应PID控制及其应用[J].自动化技术与应用,2003, 22(10):7-9.LIU Li,MA Jin-song,LI Li.Neuron-based fuzzy selfadaptation PID control and its application[J].Control Theary and Applications,2003,22(10):7-9.
[4]舒迪前.自适应控制[M].沈阳:东北大学出版社,1993.
[5]李文然.建筑电器智能技术[M].北京:中国建材工业出版社,1998.2.
[6]张瑞,廉保旺.Delphi环境下批量数据串口通信的直接实现方法[J].计算机工程与技术,2005, 26(9):2527-2529.ZHANGRui,LIAN Bao-wang.Implementation ofmassivedata serial port communication in Delphi[J].Computer Engineering and Design ,2005 ,26(9):2527-2529.
[7]胡守仁.神经网络导论[M].长沙:国防科技大学出版社,1993.
[8]韩力群.人工神经网络理论、设计及应用[M].北京:化学工业出版社,2002.