基于余水位的潮位实时推算系统
2011-05-17田春和
吴 昊,田春和
(交通运输部天津水运工程科学研究所,天津 300456)
基于余水位的潮位实时推算系统
吴 昊,田春和
(交通运输部天津水运工程科学研究所,天津 300456)
为了有效控制附近海域潮位,保证通航安全和合理有效地利用水深资源,详述了余水位的基本原理和潮汐差分方法,提出了基于此理论的验潮方案和潮位推算算法,并开发了一个潮位实时推算系统。系统采用多线程、串口通信等技术,与GPS接收机、潮位遥报仪、电脑主机等硬件进行实时通讯,获取定位信息和遥报潮位等数据,利用差分潮位推算施工船舶所在位置处的高精度潮位,并同步将推算潮位传输给作业船舶指导施工。结果表明:该系统运行稳定、操作简便、运算高效、精确度高,满足潮位控制的精度要求。
余水位;潮汐差分;实时;多线程;串口通信
Biography:WU Hao(1984-),male,assistant engineer.
某港位于渤海西部,目前在建航道总长约45 km。由于防波堤修建较长,导致其内外潮汐规律发生了较大变化,潮差不等。为有效控制附近海域潮位,促进港口建设、船舶配载及进出港等生产活动,需要建立潮汐监测及发布系统,以实现潮汐监测、发布、预报和查询的实时化。为此,文章研究了基于余水位的潮位实时推算系统,根据已知水位站的连续观测数据,实时推算疏浚或测量船舶所在地点和时刻的潮位数据,实现同步传输,指导疏浚和测量工作。
1 余水位的基本原理
余水位又称异常水位,是指实测水位减去天文潮位、平均海平面和观测误差之后的剩余部分[1]。其数学表达式可表示为[2]

式中:R(t)为余水位;h(t)为实测水位;MSL 为平均海平面;T(t)为天文潮位,由调和分析或响应分析获得;Δ(t)为观测误差。由于目前的观测仪器和观测手段基本能保证观测误差Δ(t)为偶然误差,且其量值相对于余水位可以忽略不计。因此在余水位的应用研究中,都是以实测水位减去平均海平面和天文潮位之后的残差部分代替余水位,称为粗略余水位,如式(2)表示

将平均海平面MSL与天文潮位T(t)之和称为预报潮位Y(t),则式(2)可改写为

即粗略余水位等于实测水位与预报潮位之差。为简化称呼,文章在以下的论述中将粗略余水位统称为余水位。
一般认为,余水位主要包含以下3个因素所造成的水位异常[1-3]:(1)天气因素(主要是风)造成的短期水位异常;(2)气候因素造成水位季节性变化异常;(3)天文潮推算误差的影响。
在上述因素中,天气和气候等气象因素决定了余水位的变化趋势和量级,同时也决定了其主要特性[4]。根据气象因素的变化特点即区域性和连续性,相连海面在相同气象因素的作用下其潮汐变形值高度相关,即相同的诱因及连续的流体运动和惯性作用,使余水位具有较强的空间相关性[5-6]。
2 差分潮位按距离加权内插的潮位算法
2.1 潮位算法
根据余水位的空间相关性,裴文斌[7]提出潮汐差分方法:利用已知潮汐观测站观测值和调和分析预报值,求解相关已知调和分析预报值的未设站观测位置的某时刻相对准确的潮位值。裴文斌在实验中用A站的余水位推算47 km外B站的差分潮位,如下式

HB(t)为推算的B站差分潮位。经比较发现,HB(t)与其观测水位高度吻合,最大差值不超过4 cm,46个差分潮位的中误差为±2 cm。在基于相同算法的其他实验中:天津海事局海测大队[2]利用余水位在实验海区推算任意点瞬时潮高,证明在近海和沿岸推算精度可达到10 cm;侯世喜等[5]利用余水位由烟台站实测水位恢复了威海站的水位,精度达到了5.7 cm。可见,潮汐差分方法推算的差分潮位在精度上接近于实测验潮,完全可以满足海上施工作业的精度要求。
本文系统中的潮位算法是在潮汐差分的基础上,将差分潮位按距离加权进行线性内插,来推算港池及航道内任意位置的潮位。分为2个过程:
(1)前期验潮。根据航道长度在港池及航道内布设了7个潮位点,投放自动验潮仪(图1)。
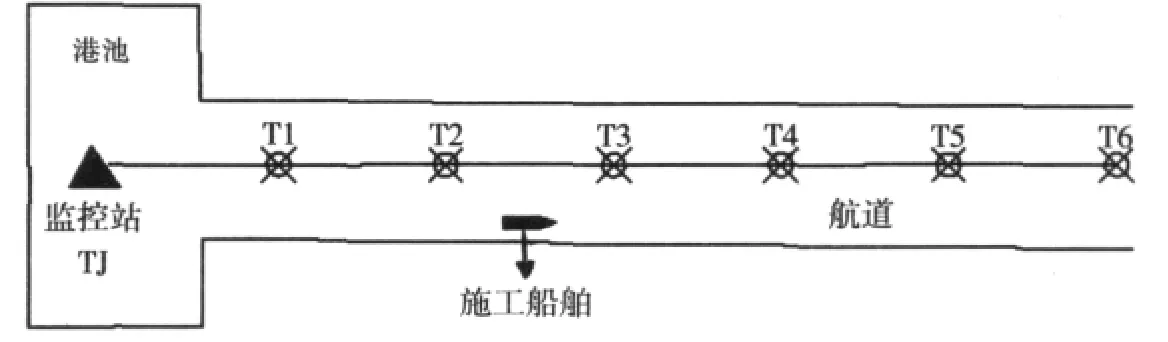
图1 潮位点布设Fig.1 Distribution of tidal points
潮位点TJ布设在港池内,其余6个潮位点T1~T6布设在航道中线上。进行一段时间的观测后,对7个点的采集数据进行调和分析,推算出各点位的预报潮位。
(2)差分潮位线性内插。因为 TJ位于港池内,距遥报站较近,所以其预报潮位可以认为等于遥报站的预报潮位。选TJ为监控站,遥报潮位减去此刻 TJ的预报潮位求得余水位,余水位加上此刻各潮位点的预报潮位得到差分潮位。以图1所示船位置为例,此时施工船舶位于潮位点T2与T3之间,其投影距离关系如图2。
则此刻船所在位置的潮位值线性内插推算公式为
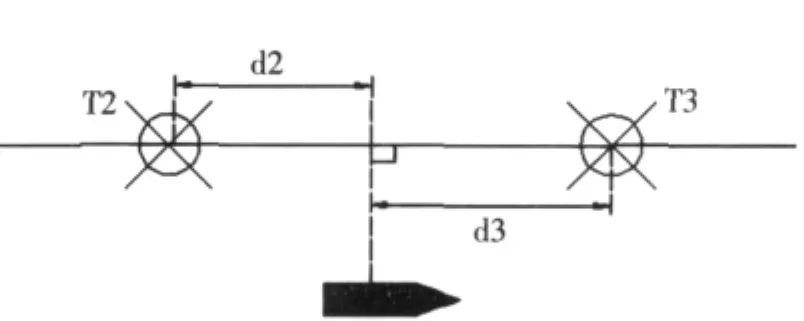
图2 距离关系Fig.2 Relation of distance

式中:Hb(t)为推算的船所在位置潮位;d2为船的航道中线投影点距T2的水平距离;d3为船的航道中线投影点距T3的水平距离;H3(t)为T3的差分潮位;H2(t)为T2的差分潮位。
2.2 精度评估
为验证潮位推算模型预报精度,采用航道KP20和KP40两处实测潮位资料(2009年6月13日~2009年7月13日),进行了潮位推算精度评估。评估结果为:航道KP20处推算潮位与其实测数据中误差为±4.81 cm;KP40处推算潮位与其实测数据中误差为±12.07 cm,均优于±0.15 m。
3 系统设计
3.1 设计思路
原有情况下,施工船舶的决策系统直接接收遥报仪传送的固定站遥报潮位。而现在,我们要将潮位实时推算系统置于遥报仪和决策系统之间:推算系统接收固定站遥报潮位;推算出此刻船所在位置的潮位;将任意站推算潮位发送给决策系统(图3)。
3.2 技术路线
系统以Microsoft Visual Studio 2008为开发平台,采用C/S架构,基于C#语言进行编写;数据库管理采用Microsoft Office Access 2003。技术关键点主要有:(1)利用串口通信、多线程等技术与GPS接收机、潮位遥报仪、电脑主机等硬件进行通讯,实现数据的实时接收和传输;(2)利用ZedGraph图形引擎实时、动态地绘制相关图表;(3)利用ADO.NET技术对后台海量数据进行快速高效的检索、调用、处理和压缩。

图3 设计思路图Fig.3 Design idea
3.3 系统组成
潮位实时推算系统主要由以下模块组成:(1)数据获取及传输模块:获取GPS定位信息、遥报潮位信息;将推算潮位信息传输到作业船舶主机的决策系统;(2)潮位推算模块:根据算法推算作业船舶所在地点和时间的潮位;(3)数据库管理模块:数据的管理及操作;(4)图形绘制模块:相关曲线、图表的绘制。
3.4 系统功能
系统功能主要分为5个部分(图4):(1)船舶实时定位。利用串口通信获取GPS定位信息,实时确定施工船舶的位置;(2)实时潮位推算。利用串口通信获取遥报潮位,根据定位信息推算出船所在位置处的潮位,同步把推算潮位发送给决策系统;(3)实时绘制潮位曲线。推算潮位的同时绘制曲线图,直观地显示潮位变化及趋势;(4)历史潮位查询。用户可以根据需要查询数据库中存储的历史潮位数据;(5)历史潮位曲线查询。用户可以根据需要查询数据库中存储的历史潮位曲线图。
3.5 系统使用
潮位实时推算系统于2009年12月开发完成和验收后,立即应用于疏浚生产,应用效果良好,已经大规模部署于绞吸式挖泥船、耙吸式挖泥船以及测量船,获得了业主单位在该单位系统内的大力推广。
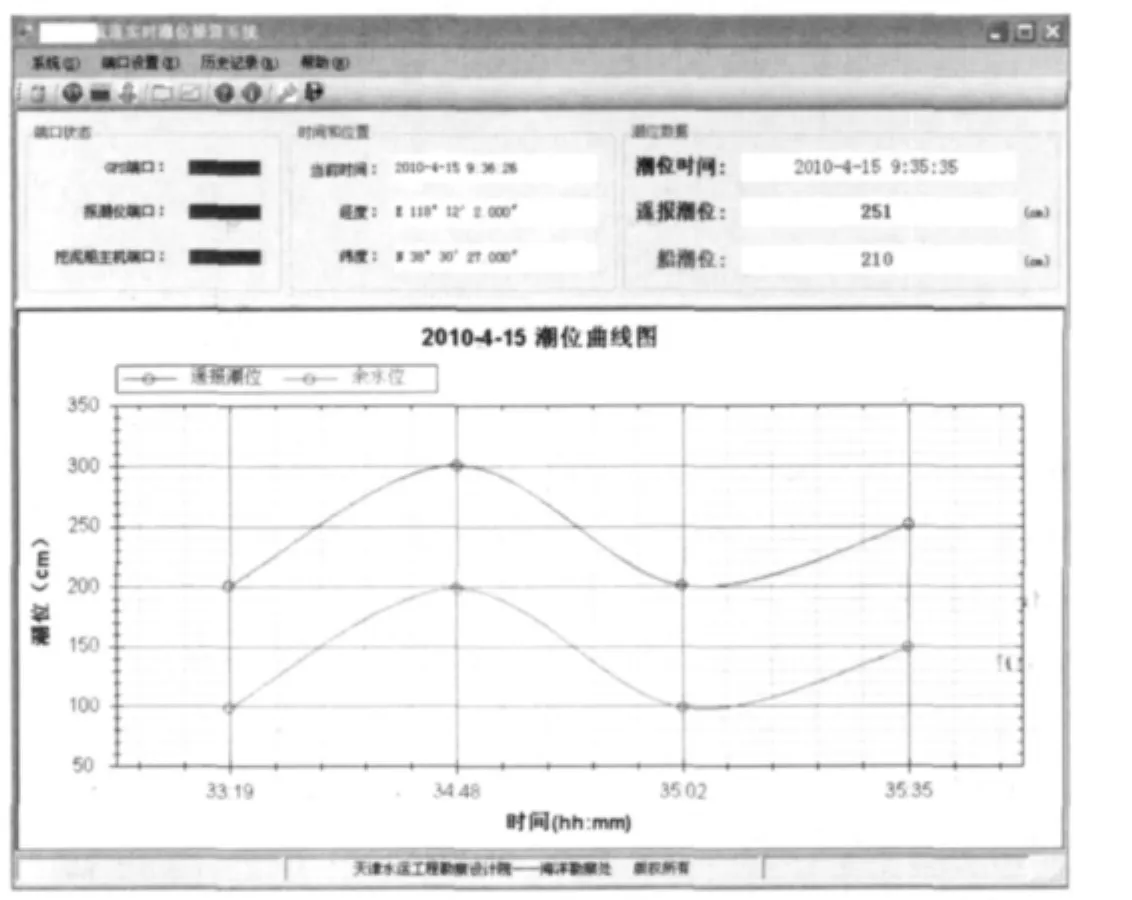
图4 系统功能Fig.4 Function of system
4 结束语
潮位实时推算系统将潮汐预报成果实时传输给施工船舶指导生产,在我国国内工程应用中尚属首次。该系统弥补了海上验潮站数量和时间长度的不足,降低了高密度、长时间验潮的成本和危险,为保证工程质量、大大降低施工成本提供了有力的帮助和支持。文中算法只是单一的认为某时刻所有潮位点的余水位相等,更精确来讲可以采用余水位内插、建立余水位场等方法来精化算法模型,这将是以后的研究方向。
[1]许军,刘雁春,暴景阳,等.基于余水位的水位粗差探测与数据修复[C]//中国测绘学会海洋测绘专业委员会.第二十一届海洋测绘综合性学术研讨会论文集.天津:海洋测绘,2009:87-89.
[2]王征,桑金,王骥.海洋潮位推算在水深测量中的应用[J].海洋测绘,2002,22(2):3-8.
[3]孟昭旭,暴景阳,许军.利用长期验潮站信息订正中期验潮站的调和常数[J].海洋测绘,2005,25(3):8-10.
MENG Z X,BAO J Y,XU J.Refing the Harmonic Constants of Gauges with Middle Duration Observations from the Information of Adjacent Long Term Gauges[J].Hydrographic Surveying and Charting,2005,25(3):8-10.
[4]牛桂芝,裴文斌,董海军.余水位的成因及其特性[C]//中国测绘学会海洋测绘专业委员会.第二十一届海洋测绘综合性学术研讨会论文集.天津:海洋测绘,2009:733-736.
[5]侯世喜,黄辰虎,陆秀平,等.基于余水位配置的海洋潮汐推算研究[J].海洋测绘,2005,25(6):29-33.
HOU S X,HUANG C H,LU X P,et al.Reckoning Reach Based on Residual Water Level of Tide[J].Hydrographic Surveying and Charting,2005,25(6):29-33.
[6]唐岩,暴景阳,许军.余水位的内插及其对潮高模型的精化[J].测绘科学,2007,32(6):94-95.
TANG Y,BAO J Y,XU J.The Interpolation of residual water level and its refining to tidal model[J].Science of Surveying and Mapping,2007,32(6):94-95.
[7]裴文斌,牛桂芝,董海军.余水位及潮汐差分方法[J].水道港口,2007,28(6):439-443.
PEI W B,NIU G Z,DONG H J.Residual Water Level and Tide Difference Method[J].Journal of Waterway and Harbor,2007,28(6):439-443.
Tidal level real time calculation system based on residual water level
WU Hao,TIAN Chun-he
(Tianjin Research Institute for Water Transport Engineering,Tianjin300456,China)
In order to control the tidal level nearby the sea effectively,guarantee the navigation safety and make the best use of water depth,the theory of residual water level and tide difference were explained.Based on those theories,the solution of tide data collection and the calculation method were proposed,and a tide real time calculation system was designed.The technique of multithread and serial port was used in the system to get the information of position and tidal level by communicating with GPS transceiver,telemetry tide gauge and computer.Then the high-precision tidal levels of the ship location were calculated by means of differential tide,and the calculated tidal level was sent to ship at the same time.The results show that the system has the advantages of stable operation,easy manipulation,high efficiency and high accuracy,which satisfies the precision level of tide control.
residual water level;tide difference;real time;multithread;serial port
P 731.23;TP 39
A
1005-8443(2011)06-0445-04
2010-05-25;
2010-07-27
吴昊(1984-),男,山东省日照市人,助理工程师,主要从事海洋勘察、地理信息研究工作。
book=448,ebook=440
