海产育苗养殖水温控制系统设计
2011-05-11张翠敏杨永刚姚青梅
张翠敏,杨永刚,姚青梅,胡 山
(1. 天津职业技术师范大学 天津市信息传感与智能控制重点实验室,天津 300222;
2. 中国民航大学 航空工程学院,天津 300300)
海产育苗养殖水温控制系统设计
张翠敏1,杨永刚2,姚青梅1,胡 山1
(1. 天津职业技术师范大学 天津市信息传感与智能控制重点实验室,天津 300222;
2. 中国民航大学 航空工程学院,天津 300300)
0 引言
我国海水养殖技术和规模不断发展和扩大,已成为世界海水养殖大国。育苗是海水养殖过程中非常重要的一个环节,为保证水产苗种发育的需要,必须为不同种类和不同发育阶段的鱼虾幼体提供适宜的温度环境,以保证幼体的成活并加快其生长发育。
水温是水产品生活条件中极其重要的因子,直接影响着养殖对象的生理代谢活动,进而影响其生长发育。目前水产养苗池调节水温的一般方法是:由人工用温度计到各池中测量温度数值,把实测温度与标准温度比较,根据比较结果对供热水阀门进行必要的调节,过一段时间后,还需再次对各水池的温度进行检测以决定下一步的调节方向。上述过程需要反复进行,加之由于热水循环供热的不均匀性,每次都需要在多处测量后取其平均值,费工费时,极不方便,而且精确度低,可靠性差,从而制约和影响着育苗生产的产品质量和经济效益。由于育苗企业生产管理技术落后,仔苗的成活率较底,直接影响到育苗企业的经济效益。因此,如何提高海水育苗的自动化水平和仔苗的成活率,具有重大的现实意义和广阔的应用前景。
目前国外有些厂家生产成套的育苗自动化生产设备,具有较高的自动化水平。国内一些大型水产育苗企业已进行了引进。但是由于进口设备价格较高,产品的技术性能也不适合国内小型育苗企业,因此没有能够被广泛推广应用。国内相关研究文献报道较少。
本课题立足于中小型海水育苗企业的现状,研究性能价格比较高的海水养殖育苗池自动化智能温度控制系统。该系统能够根据仔苗孵化温度曲线的要求,实现育苗池的温度自动检测和智能控制,避免由于人工调节育苗池温度不及时造成的巨大损失。
海产养殖的水温作为被控对象具有纯滞后、非线性、大惯性等特点,不同温度段的时间常数不一样,控制对象这种特性反映到实际中,温度梯度在不同的温度段有很大差别,如果采用温度建模的方法,需要考虑多种外界环境因素的干扰,包括日照、风速、风向以及水下情况等,很难精确建立起相应的数学模型。为此,本文根据仔苗孵化所需的适宜温度,结合PID控制算法实现不同温度段的智能恒温控制。
1 海产养殖水温控制系统的硬件设计
1.1 系统控制原理
实现海产养殖水温的恒定控制,需要实时自动采集水池内多点的温度值,反馈给控制器,控制器根据现在池水温度调节PWM的占空比,进而调节MOS栅-源电压,控制步进电机的输入脉冲数量,从而控制热水阀门开启的时间和角度来加热池水,或者给变频器发送控制信号,实现风机的转动来降低池水温度,最终达到水温智能控制的目的。控制原理如图1所示,硬件系统主要包括控制器S3C44B0X、温度传感器芯片AD590、A/D、步进电机、变频器和风机等。为降低系统成本,控制系统采用自主开发基于ARM微处理器的嵌入式系统,并采用RS485总线实现远程控制。RS485总线抗干扰能力强,传输距离较远,适合于较为恶劣的现场环境,并具有成本低、可靠性高、使用方便等特点。
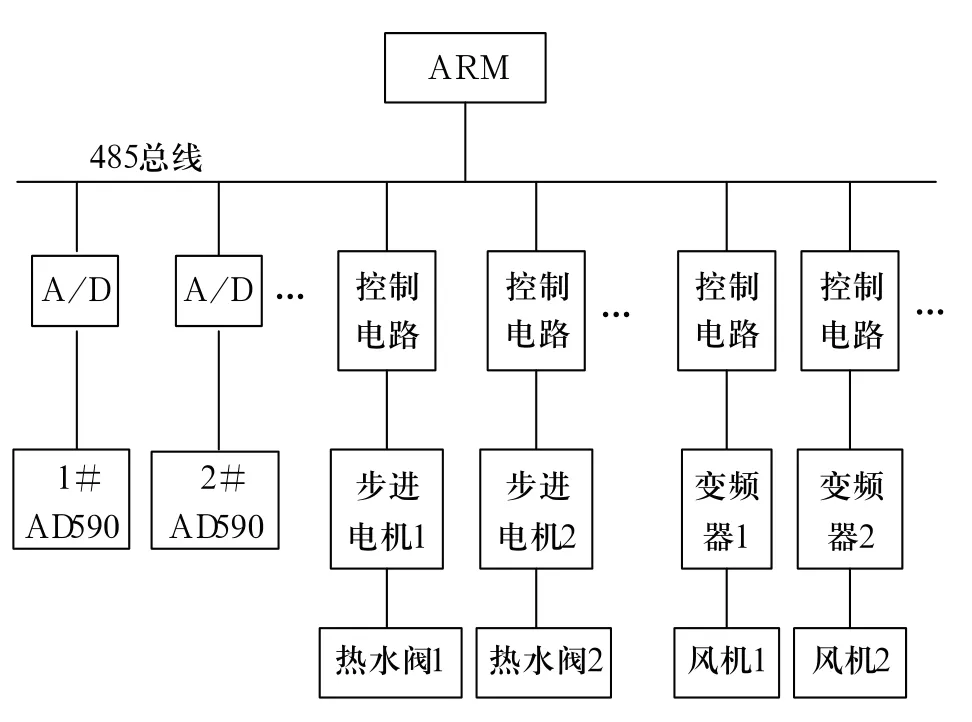
图1 温度控制系统结构
1.2 系统硬件
S3C44B0X微处理器是三星公司专为手持设备和一般应用提供的高性价比和高性能的微控制器解决方案,它使用ARM7TDMI核,最高工作频率为 66MHz。S3C44B0X通 过 在ARM7TDMI内容基础上扩展一系列完整的通用外围器件,使系统费用降至最低,并具有5个PWM定时器可以满足本设计的要求。
ADI公司的AD590的测温范围为-55~+150 ℃,它有非常好的线性输出性能,温度每增加1℃,其电流增加1μA。
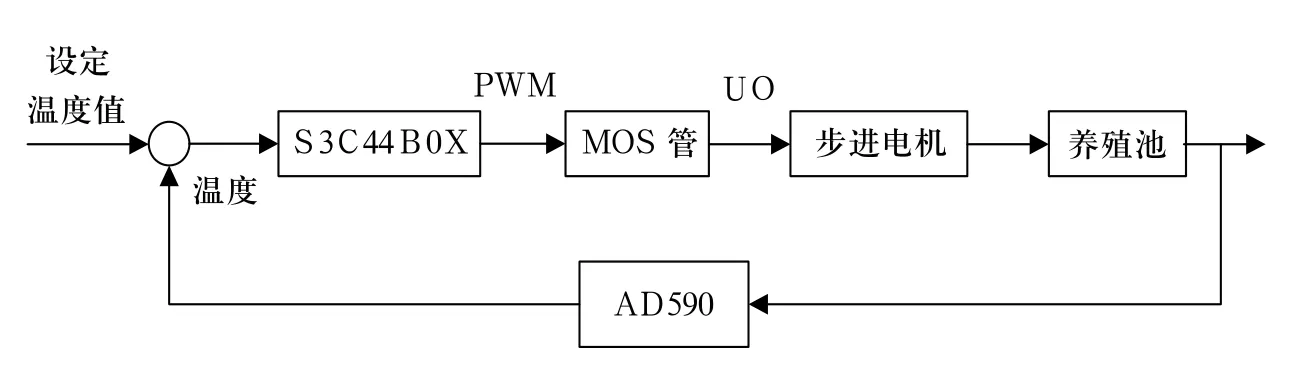
图2 总体控制电路
步进电动机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个步距角,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机可以作为一种控制用的特种电机 ,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。
1.3 热水阀控制电路
热水阀的开启角度随着测量水温与设定水温的差值的变化而变化,总体控制电路和步进电机细分控制分别如图2和3所示,相对于传统的恒频脉宽调制方式,节省了锯齿波发生电路和D/A转换器。对于两相双极步进电机,在正弦波的正半周和负半周线圈中的电流方向是不同的,为了充分利用资源,用一个4路与门对各路PWM信号分时复用,使每个PWM口可以驱动一个线圈。功率输出部分使用常见的双H桥功率放大器L298N。L298N用标准的TTL逻辑电平控制,与单片机接口方便,可驱动46V、2A以下的电机。
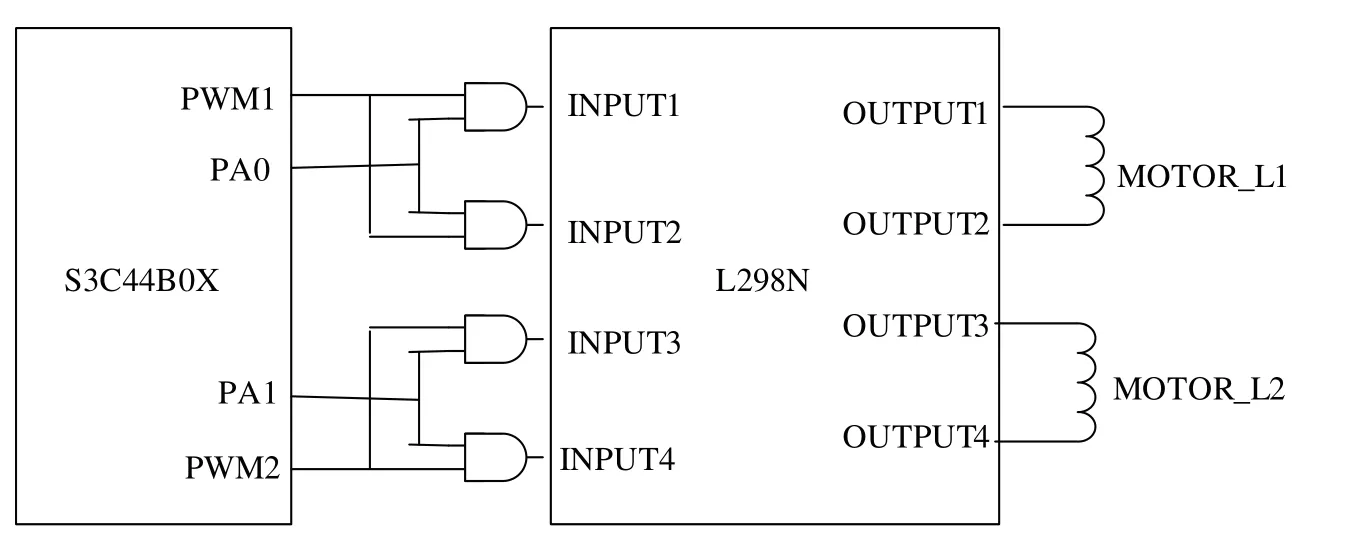
图3 步进电机细分控制电路
1.4 风机的控制
采用变频器直接控制风机泵类负载是一种最科学的控制方法 利用变频器内置调节软件直接调节电动机的转速,结合水温的当前值,控制池水温度的降低和保持恒定,从而满足系统要求。
2 系统软件设计
本文以虾苗养殖为对象,进行控制系统设计,虾苗的耐温范围较广,最适宜温度为19~23℃,设计要求达到22±2℃的恒温控制。本文采用PID反馈调节来实现温度曲线的跟踪控制,系统总的工作流程如图4所示。
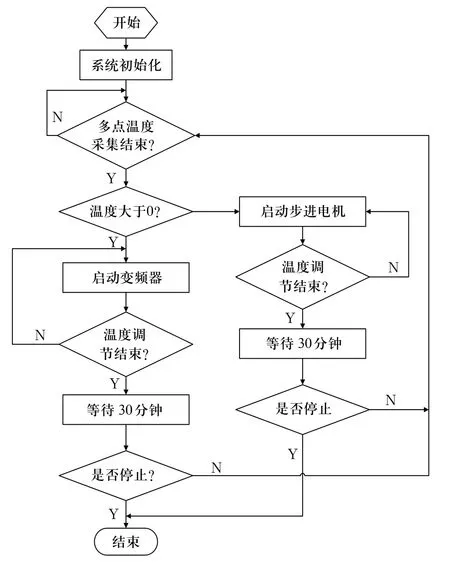
图4 控制系统工作流程
PID控制在很多领域内被广泛应用,PID控制规律表示比例-积分-微分控制。海产养殖水温控制系统的PID温控模块的主程序流程图如图5所示。
PID控制算法是以连续系统的PID控制规律为基础,再将其数字化得到的。PID控制有增量式和位置式,本系统采用的是增量式PID控制,表达式如下:

其中,Kp为比例系数,Ki为积分系数,Kd为微分系数。对应的增量式PID控制程序流程图见图6。
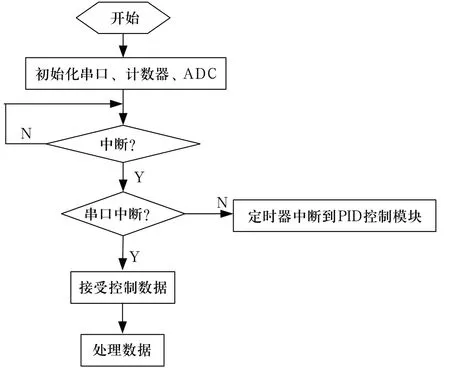
图5 主程序控制流程
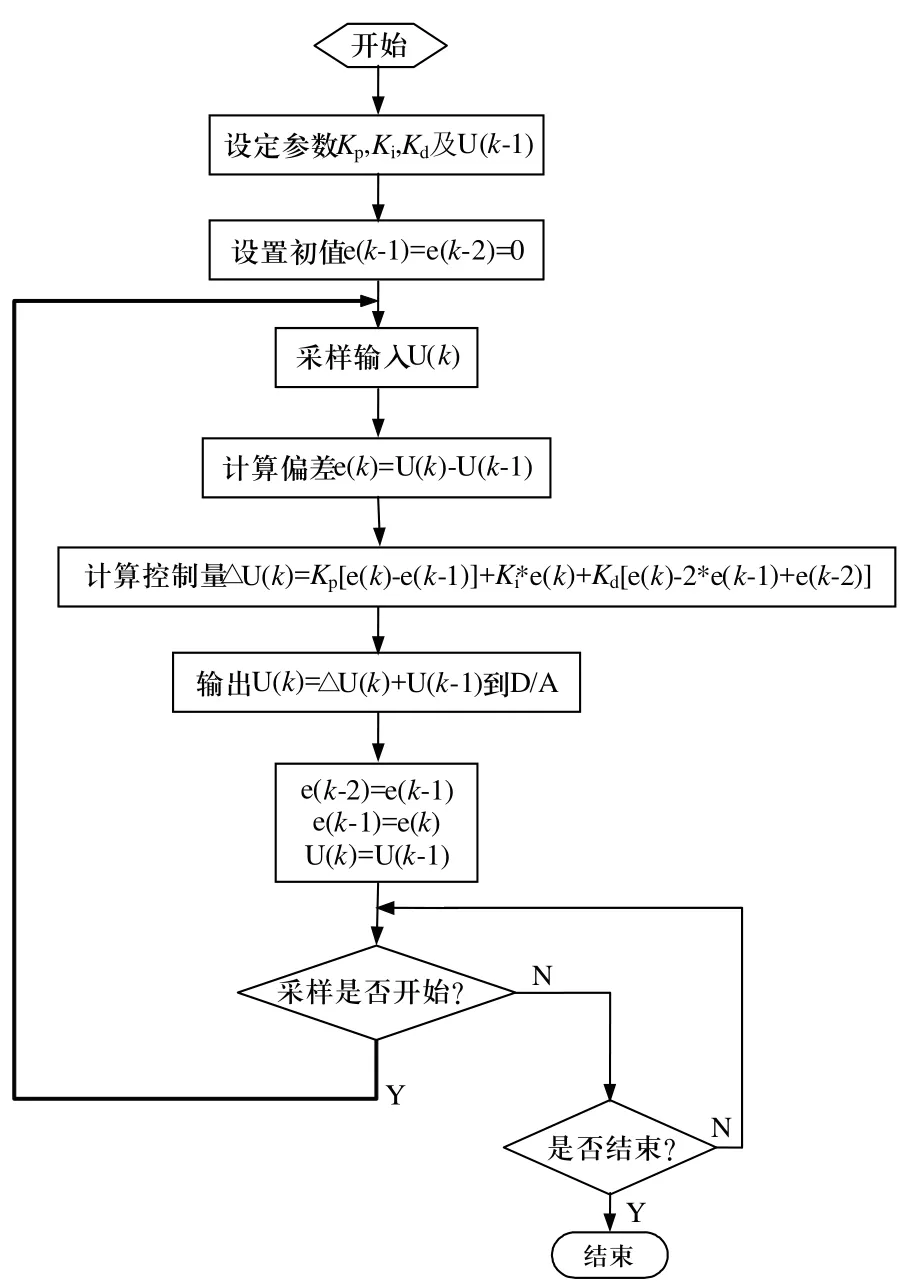
图6 PID算法控制流程
工作时,预先设定的温度参数值,PID控制器把设定值与实际测量的温度值相减,得到控制误差,进而通过比例系数、积分系数和微分系数计算控制量,控制步进电机的电压或者变频器来实现恒温控制。设定温度预设值为22℃,仿真得到增量式PID控制器的瞬态响应曲线如图7所示。
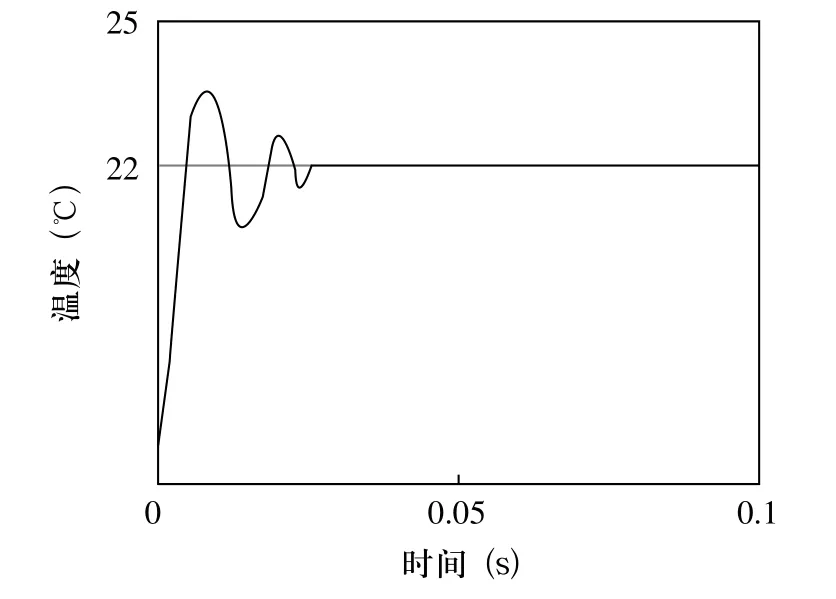
图7 增量式PID控制的瞬态响应
3 系统实验
按照系统原理,搭建实验平台,要求系统实现22±2℃的恒温控制,对池水中某一温度测量点进行恒温跟踪控制,温度数据见表1。
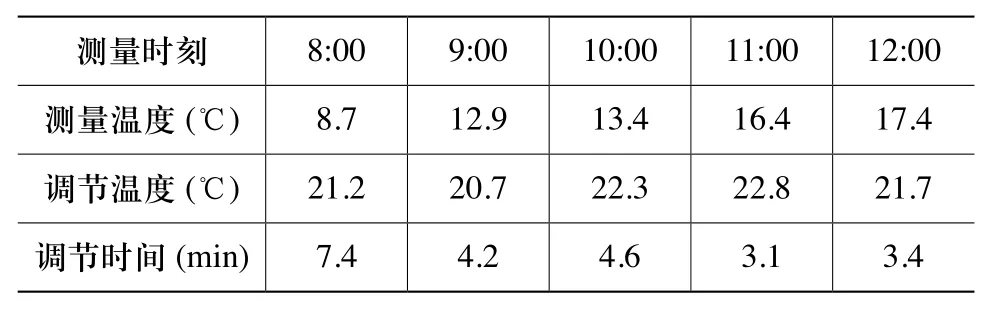
表 1 不同时刻的温度控制结果
从表中可以看出,当池水温度改变时,系统可以很快调节完毕,并且结果满足设计要求。因此本文设计的海产鱼苗养殖温度控制系统,在相对比较密集的多个温度采集与控制点下,可以快速实现温度调节,节约人力成本,并能保证测量结果的准确性。
4 结论
本文针对海产育苗养殖进行温度控制系统设计,采用基于ARM的嵌入式结构,保证系统具有较小的体积和较低的成本。采用步进电机并结合PID反馈调节控制热水阀的开启角度实现池水的加热,同时采用变频器来控制风机的转动来实现池水的降温,相应降低了系统的功耗。实验结果表明,系统能够满足设计要求,为我国海产养殖的发展提供了一定的理论基础。
[1]林伟, 邵华枫, 李才安, 陈碧波. 新型水温控制系统的设计与实现[J]. 自动化技术与应用. 2008, 27(3): 58-61.
[2]陈智华, 王大锐, 刘秋娟, 张勋才. 海参养殖水温控制模型的设计[J]. 计算机工程与应用. 2007, 43(32): 225-229.
[3]曹震, 曹朝辉. 基于温度智能控制的微机监测系统[J]. 自动化仪表. 2008, 29(9): 30-32.
[4]文定都, 谢永芳. 基于模糊控制的水温控制系统[J]. 自动化与仪器仪表. 2006, 125(3): 62-63.
[5]Jun Wang, Wei Tong, Lei Shi. The application of PID neural network decoupling control technology in the VAV air-conditioning system[J]. Journal of Northwest University(Natural Science Edition). 2002, 32(3): 237-239.
Mariculture temperature control system for marine aquaculture breeding
ZHANG Cui-min1, YANG Yong-gang2, YAO Qing-Mei1, HU Shan1
水温是水产生物生活条件中极其重要的因子。本文针对海产育苗养殖的温度控制要求,采用基于ARM的嵌入式结构,设计了具有较小体积和较低成本的海产育苗养殖水温控制系统。该系统采用步进电机并结合PID反馈调节控制热水阀的开启角度实现池水的加热,同时采用变频器来控制风机的转动来实现池水的降温。实验结果表明,系统稳定可靠,能够较好满足设计要求。
海产养殖;嵌入式结构;PID控制;恒温检测
张翠敏(1977-),女,讲师,硕士,主要从事电子技术、自动控制技术和电气自动化的研究工作。
TP391
A
1009-0134(2011)1(上)-0217-03
10.3969/j.issn.1009-0134.2011.1(上).69
2010-12-03
