基于模糊PID的全方位移动机器人运动控制
2011-05-08田琦,李琪,姚鹏,赵媛
田 琦 ,李 琪 ,姚 鹏 ,赵 媛
(第二炮兵工程学院基础部,陕西西安 710025)
移动机器人是一个集环境感知、动态决策、行为控制与执行等多种功能于一体的综合系统[1],其运动控制是移动机器人领域的一个重要研究方向,也是移动机器人轨迹控制、定位和导航的基础。传统的运动控制常采用PID控制算法,其特点是算法简单、鲁棒性强、可靠性高,但需要精确的数学模型才对线性系统具有较好的控制效果,对非线性系统的控制效果并不理想。模糊控制不要求控制对象的精确数学模型,因而灵活、适应性强。可是,任何一种纯模糊控制器本质上是一种非线性PD控制,不具备积分作用,所以很难在模糊控制系统中消除稳态误差。针对这个问题,结合运动控制系统的实际运行条件,设计采用模糊PID控制方法来实现快速移动机器人车轮转速大范围误差调节,将模糊控制和PID控制结合起来构成参数模糊自整定PID算法用于伺服电机的控制,使控制器既具有模糊控制灵活而适应性强的优点,又具有PID控制精度高的特点,使运动控制系统兼顾实时性高、鲁棒性强及稳定性等设计要点,并可通过模糊控制规则库的扩充,为该运动控制系统方便添加其他功能[2]。
1 全方位移动机器人运动学分析
研究的是一种全自主移动机器人平台,该机器人采用了四轮全向移动的运动方式,具有全向运动能力的系统使机器人可以向任意方向做直线运动,而之前不需要做旋转运动,并且这种轮系可满足一边做直线运动一边旋转的要求,达到终状态所需的任意姿态角。全向轮系的应用将使足球机器人具有运动快速灵活,控球稳定,进攻性强,以及易于控制等优点,使机器人在赛场上更具竞争力。
1.1 全向轮
机器人采用的全向轮在大轮的周围均匀分布着小轮,大轮由电机驱动,小轮可自由转动。这种全方位轮可有效避免普通轮不能侧滑所带来的非完整性约束,使机器人具有平面运动的全部3个自由度,机动性增强。基于以上分析,选择使用这种全向轮。
1.2 运动学分析
在建立机器人的运动模型前,先做以下假设:
(1)小车在一个理想的平面上运动,地面的不规则可以忽略。
(2)小车是一个刚体,形变可以忽略。
(3)轮子和地面之间满足纯滚动的条件,没有相对滑动。
全方位移动机器人由4个全向轮作为驱动轮,它们之间间隔90°均匀分布,如图1所示,其简化运动学模型如图6所示。其中,xw-yw为绝对坐标系,xm-ym为固连在机器人车体上的相对坐标系,其坐标原点与机器人中心重合。θ为xw与xm的夹角,δ为轮子与ym的夹角,L为机器人中心到轮子中心的距离,vi为第i个轮子沿驱动方向的速度[3]。

图1 机器人的运动模型
可求出运动学方程如式(1)所示
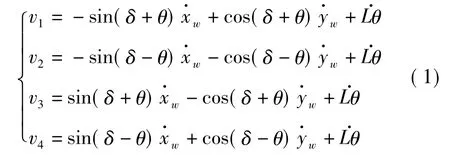
因为轮子为对称分布,常数δ为45°,故得到全向移动机器人的运动模型

其中,v=[v1v2v3v4]T为轮子的速度 s=为机器人整体期望速度。

P为转换矩阵。
这样,就可以将机器人整体期望速度,解算为到4个轮子分别的速度,把数据传送到控制器中,就可完成对机器人的控制。
2 基于模糊PID的运动控制器设计
目前,常规PID控制器已被广泛的应用于自动化领域。但常规PID控制器不具备在线整定控制参数kp、ki、kd的功能,不能满足系统在不同偏差对e以及偏差值的变化率ec对PID参数的自整定要求,因而不适用于非线性系统控制。
文中结合本运动控制系统的实际运行条件,设计采用模糊PID控制方法来实现快速移动机器人车轮转速大范围误差调节,将模糊控制和PID控制结合起来构成参数模糊自整定PID算法用于伺服电机的控制,使控制器既具有模糊控制灵活而适应性强的优点,又具有PID控制精度高的特点,使运动控制系统兼顾了实时性高、鲁棒性强及稳定性等设计要点,并可通过模糊控制规则库的扩充,为该运动控制系统方便添加其他功能[4]。
2.1 参数模糊自整定PID的结构
模糊PID控制系统结构如图2所示,系统的输入为控制器给定轮速,反馈值为电机光电码盘反馈数字量,Δkp、Δki、Δkd为修正参数[5]。PID 控制器的参数 kp、ki、kd由式(3)得到


图2 自适应模糊控制器结构
由此,根据增量式PID控制算法可得到参数自整定PID控制器的传递函数为

2.2 速度控制输入输出变量模糊化
在此速度控制器中的输入为实际转速与设定转速的偏差值e,以及偏差值的变化率ec,输出量为PID参数的修正量Δkp、Δki、Δkd。它们的语言变量、基本论域、模糊子集、模糊论域及量化因子如表1所示[6]。

表1 输入、输出量的模糊化
模糊变量E和EC以及输出量 ΔKP、ΔKI、ΔKD的语言变量和论域确定后,必须对模糊语言变量确定其隶属度[7]。常用的隶属函数有B样条基函数、高斯隶属函数、三角隶属函数等,考虑到设计简便及实时性的要求,文中采用三角隶属函数。
2.3 参数自整定规则
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到针对kp,ki,kd这3个参数分别整定的模糊控制表。根据kp,ki,kd这3个参数分别的作用,可制定模糊控制规则[8],以kp为例,列规则如表2,ki,kd可类似推出。
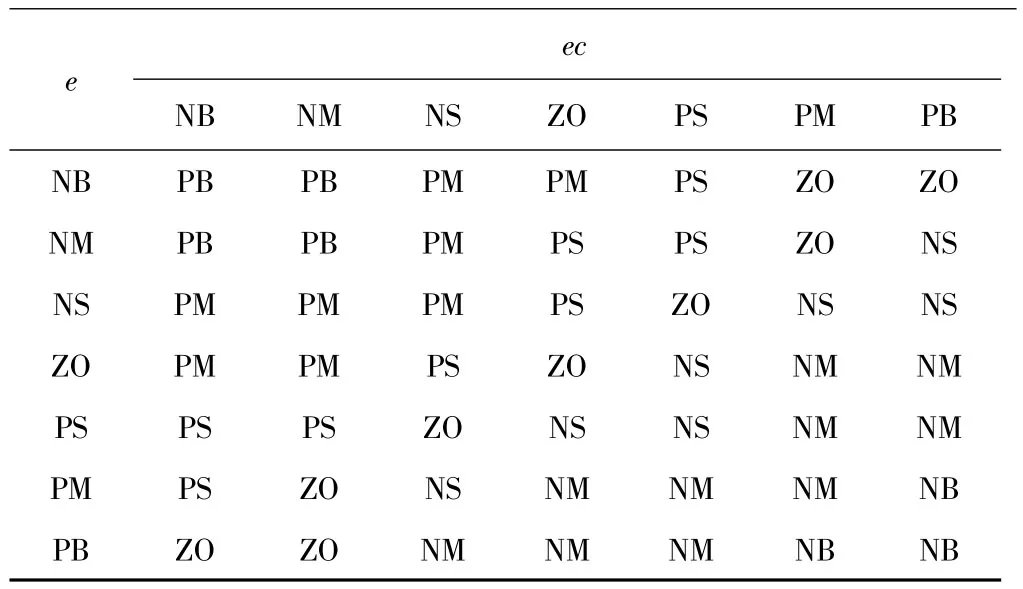
表2 kp的模糊规则表
2.4 输出量解模糊
依据速度模糊控制参数整定规则确定出输出量后,得到的只是一个模糊集合,在实际应用中,必须用一个精确量控制被控对象,在模糊集合中,取一个最能代表这个模糊集合的单值过程称为解模糊裁决。常用的解模糊算法有最大隶属度法、加权平均法等,根据实际情况,采用加权平均法进行解模糊。此时,模糊控制器输出可表示为

最后,根据式(3)可得到最终的PID控制器参数。模糊PID控制程序流程如图3所示。
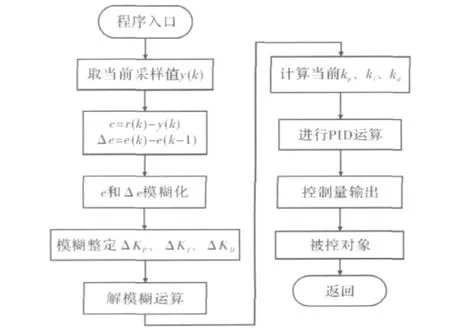
图3 模糊PID控制程序流程图
3 实验结果
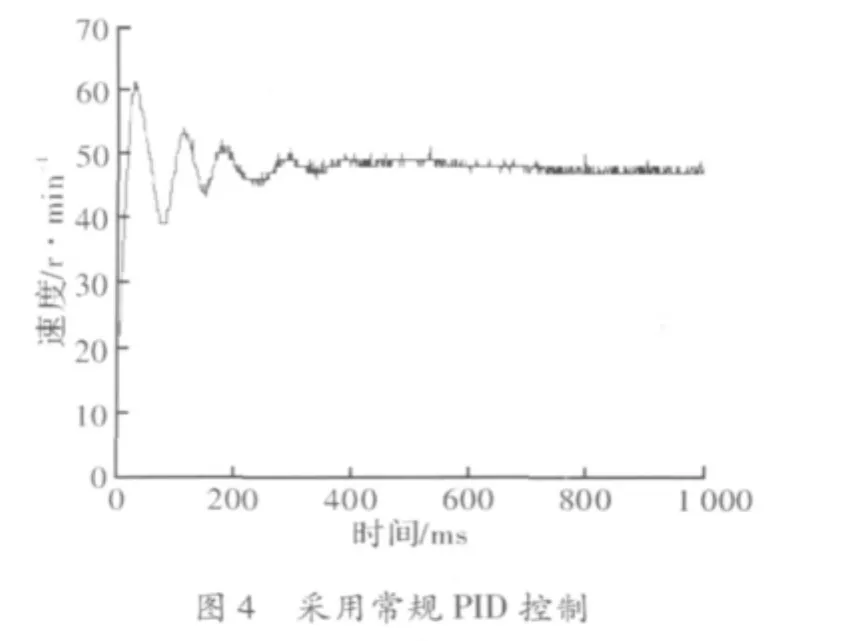
为验证参数模糊自整定PID控制器的有效性,文中对直流电机分别做了常规PID控制和模糊PID控制实验。实验中给定轮速为50 r/min,图4为采用常规PID控制方法控制的电机转速,图5为采用模糊PID控制方法控制的电机转速。相比常规PID控制算法,采用参数模糊自整定PID算法能够明显降低超调量,加快响应速度,改善控制系统对轮速的控制效果。

4 结束语
机器人运动控制系统是整个Robocup机器人系统的执行机构,在场上的表现直接影响了整个足球机器人系统。文中以足球机器人为平台,考虑到系统的时滞性和非线性,采用模糊控制与PID控制相结合的方式,并在自行研制的足球机器人上进行了速度控制的实验研究。结果表明,该方法弥补了常规PID控制应用在机器人运动速度控制时超调量大,响应时间长的缺点,可以取得理想的效果。
[1]李磊,叶涛,谭民,等.移动机器人技术研究现状与未来[J]. 机器人,2002,24(5):475-480.
[2]张锐,吴成东.机器人智能控制研究进展[J].沈阳建筑工程学院学报:自然科学版,2003(1):61-64.
[3]徐建安,邓云伟,张铭钧.移动机器人模糊PID运动控制技术研究[J].哈尔滨工程大学学报,2007,27(Z1):115-119.
[4]刘祚时,邝先验,吴翠琴.基于模糊PID的足球机器人运动控制研究[J].工程设计学报,2006,13(4):224-227,240.
[5]HE S Z,TAN S,WANG P Z.Fuzzy self-tuning of PID controllers[J].Fuzzy Sets &Syst,1993,56(5):37-46
[6]汪海燕,李娟娟,张敬华.自适应模糊PID控制的无刷直流电机及仿真[J].微电机,2003,36(4):41-44.
[7]李琳,曾孟雄.模糊PID控制在运动控制中的应用[J].机械与电子,2006,25(2):65-67.
[8]李东亮,毋玉芝.模糊自适应PID控制器在足球机器人中的应用[J].微计算机信息,2008(24):282-283.
