多个静止无功补偿器并联运行的结构选择
2011-05-07王光明王崇军同向前
王光明 王崇军 王 任 同向前
1.中国石油长庆油田分公司第三采油厂 宁夏 银川751506
2.西安电力高等专科学校 陕西 西安 710032
3.西安理工大学 陕西 西安 710048
0 引言
STATCOM具有功耗低,响应快,无谐波污染,体积小等优点,尤其是在系统欠电压条件下无功调节能力强,是低压配电系统动态无功补偿的理想产品[1-2]。但是随着容量增大,电力电子器件所容许的开关频率却越来越低,而较低的开关频率又直接影响STATCOM的补偿效果,所以当STATCOM用于大容量无功补偿时就面临着器件开关与容量之间的矛盾。本文将广泛应用于有源电力滤波器中的多模块并联结构[3-5]应用于STATCOM中,通过多台STATCOM模块并联运行实现大容量的无功补偿。对常见的并联结构优缺点进行分析,提出一套适合STATCOM并联运行的结构,仿真结果证明其在稳态、动态情况下具有良好的补偿效果。
1 并联运行结构
1.1 位置优先型并联结构
图1为位置优先型并联结构图。多个STATCOM模块依次并联在负载和电源之间,就单个模块而言,其负载侧的STATCOM模块都相当于负载的一部分,每个模块要补偿的无功就是各自负载侧的负荷无功功率。在这种运行方式下,离负载最近的STATCOM模块检测无功电流,根据自身容量计算出补偿电流进行无功补偿。该模块后面的STATCOM模块检测前一个模块补偿剩余的无功电流,也根据自身容量计算补偿电流进行无功补偿。以此类推,各个模块按照其接入位置顺序自动承担额定容量范围内的无功补偿电流。显然,越靠近负载的模块,无功补偿的优先权越高。
位置优先型并联结构中,各模块之间没有互联线,从而取消了模块间的距离限制,结构简单,可靠性高。在运行过程中若有模块发生故障退出运行,后面的模块可以自动补偿故障模块应补偿的无功功率,所以容错能力强。

图1 位置优先型并联结构
但是由于STATCOM存在响应时间,当负荷变化时,前面的模块还没有达到满容量运行,后面的模块已经开始检测到无功电流进行补偿,随着前面模块补偿电流增大,后面模块的补偿电流逐渐减小。所以位置优先型并联结构模块间会相互影响,补偿速度较慢,不适合无功变化频繁的情况。
1.2 分散控制型并联结构
在分散控制型并联结构中,各模块共用一套互感器,补偿电流指令的计算分散到各个模块中。在各个模块内部计算总补偿电流,乘以每台模块的补偿系数,得到该模块的补偿电流。分散控制型并联结构有检测负载侧和检测电源侧两种方式,如图2(a)、(b)所示。

图2 分散控制型并联结构
图2(a)为检测负载侧方式,STATCOM模块无功信号检测点靠近负载,检测信号传入每台STATCOM模块,在模块中计算出检测点的无功电流,乘以每台STATCOM模块补偿系数,得到指令电流,如图3(a)所示。这种方式补偿速度快,但容错能力差,若有模块故障退出,其余模块不能补偿故障模块剩余的无功。
图2(b)为检测电源侧方式,STATCOM模块无功信号检测点靠近电源,检测信号传入各模块中经过计算得到的无功电流是负荷无功电流和STATCOM模块发出无功电流的差值err。对err进行积分调节和得到需要补偿的无功电流值,乘以每台STATCOM模块补偿系数得到每台模块的指令电流,如图3(b)所示。


图3 STATCOM控制系统图
与检测负载侧相比,检测电源侧方式如果在运行过程中有模块故障退出,err不再为0,每台STATCOM模块的指令电流随之变化,其他模块会自动补偿故障模块留下的无功差值,有较好的容错效果。但在实际运行过程中,当负载无功电流被完全补偿,即err为0时,各模块由于检测误差,有可能出现一个模块检测到err是正值,而另一个模块检测到err为负值,两者之和仍为0的情况。以两台STATCOM模块并联为例,err实际值为0,模块1检测到的err值为0.01,模块2检测到的err值为-0.01,经过指令电流计算,第一台模块发出无功增加,第二台模块发出无功减小。而err实际值仍为0,模块1检测到的err值仍为0.01,模块2检测到的err值仍为-0.01,第一台模块发出无功电流继续增大,第二台模块发出无功继续减小。如此循环,模块最终会达到满容量运行。因此,检测电源侧的分散控制型结构不适合采用。
1.3 集中控制型并联结构
集中控制型并联结构检测信号送入集中控制器,在集中控制器中计算出无功补偿的指令电流,并进行统一分配。集中控制型并联结构也分为检测负载侧和检测电源侧两种方式,如图4(a)、(b)所示。
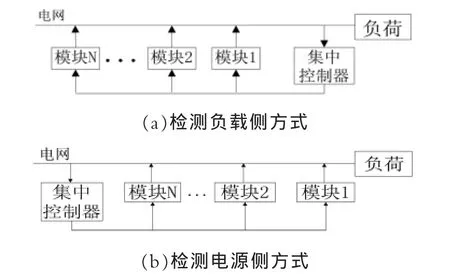
图4 集中控制型并联结构
与位置优先型并联结构相比,集中控制型结构将需要补偿的无功电流在各个STATCOM模块中平均分配了,所以响应速度比较快[6],且模块之间不存在相互影响的情况;与分散控制型相比,集中控制型并联结构由集中控制器统一分配指令电流,采用检测电源侧方式时,不会出现因为存在检测误差而导致一个模块补偿容量增大,一个模块容量减小的情况,具有良好的补偿效果。
2 仿真及结果分析
按图4(b)结构对两台等容量STATCOM模块并联运行进行仿真。电网电压380V/50Hz。每台STATCOM模块的额定容量为±20kVar。分别对负荷稳定,负荷变化和有模块故障退出3种情况进行仿真。
2.1 负荷稳定情况仿真
无功负荷设定为17kVar。仿真结果如图5(a)、(b)、(c)所示。

图5 负荷稳定情况下的仿真波形
由图5可以看出,经过大约0.13s,即6~7个周波,无功功率被完全补偿。两台STATCOM模块将需要补偿的无功功率平均分配,分别补偿一半的负载无功功率。仿真结果证明在负荷稳定的情况下,该并联结构有良好补偿效果。
2.2 负荷变化情况仿真
无功负荷设定为15kVar,0.3 s后切换为22kVar。仿真结果如图6(a)、(b)、(c)所示。

图6 负荷变化情况下的仿真波形
由图6可以看出,经过大约0.13s,无功功率被完全补偿。在0.3s负载切换后,仍然经过0.13s,负载被完全补偿。仿真结果证明在负荷变化的情况下,该并联结构有良好补偿效果。
2.3 模块切除情况仿真
无功负荷设定为17kVar,0.3 s时STATCOM模块2退出运行。 仿真结果如图7(a)、(b)、(c)所示。
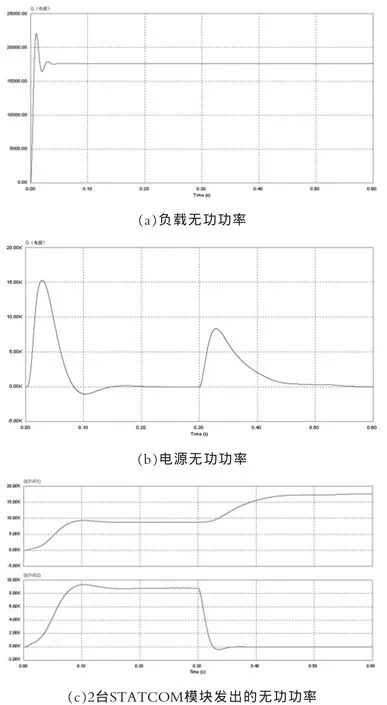
图7 有模块退出情况下的仿真波形
由图7可以看出,在0.3s模块2退出运行后,模块1发出无功功率增加,模块2发出无功功率下降到0。经过大约0.13s,负载无功功率被完全补偿。仿真结果证明在有模块退出运行时,该并联结构仍能将负载无功功率完全补偿,补偿效果良好。
3 结论
本文针对STATCOM多模块并联运行结构进行分析。提出一种检测电源侧信号的集中控制型并联结构并进行仿真验证。表明:
1)系统在负荷稳定的情况下,实现多模块并联运行,补偿效果良好。
2)系统在负载变化的情况下,能够跟踪负载的变化,实现负载无功功率的完全补偿。
3)系统在有模块退出运行的情况下,其他模块可以自动调整输出功率。具有良好的补偿效果。
[1]王兆安,杨君,刘进军等.谐波抑制和无功功率补偿[M].北京:机械工业出版社,2005.
[2]M.S.EIMoursi,A.M.Sharaf.Voltage stabili--zation and reactive compensation using a novel FACT STATCOM sheme [C].Canadian Conference on Electrical and Computer Engineering 2005.Saskatoon,Canda.
[3]魏学良,戴珂,康勇等.三相三线并联型有源电力滤波器并联控制[J].电力系统自动化,2007,31(01):71-73.
[4]何英杰,邹云屏,刘飞等.高压大容量有源滤波器并联运行研究[J].电工技术学报,2007,6(22):94-100.
[5]杨振宇,赵剑锋,唐国庆.并联型有源电力滤波器限流补偿策略研究[J].电力自动化设备,2006,3(26):21-24.
[6]同向前,吴庆范,尹军.STATCOM并联运行控制方法的研究[J].西安理工大学学报,2008,24(04):426-430.
