带定子电阻辨识的异步电机无速度传感器直接转矩控制
2011-04-27佘致廷郑勇袁俊波张红梅
佘致廷,郑勇,袁俊波,张红梅
(1.湖南大学 电气与信息工程学院,湖南 长沙 410082;2.湖南大学 电力推进与伺服控制教育部重点实验室,湖南 长沙 410082)
带定子电阻辨识的异步电机无速度传感器直接转矩控制
佘致廷1,郑勇1,袁俊波2,张红梅2
(1.湖南大学 电气与信息工程学院,湖南 长沙 410082;2.湖南大学 电力推进与伺服控制教育部重点实验室,湖南 长沙 410082)
在建立异步电机直接转矩控制动态数学模型的基础上,提出了交互式模型参考自适应参数辨识方法,通过参考模型和可调模型互换,实现了带定子电阻参数辨识的转速观测。仿真和实验结果表明,该方案不仅实现了转速的高精度辨识,而且能较好地解决定子电阻变化对系统动静态性能的影响,改善了异步电机无速度传感器直接转矩控制低速转矩脉动。
异步电机;无速度传感器;直接转矩控制;交互式模型参考自适应
1 引言
直接转矩控制是继矢量控制后发展起来的一项高性能交流电机控制技术。该控制方法以其结构简单,鲁棒性强,动态性能好而得到了广泛应用[1-3]。直接转矩控制本身不需要速度信息,为了实施对电机转速的精确控制,必须引入速度反馈和调节,但是速度传感器的使用影响了系统的简单性、廉价性和可靠性。基于以上原因,无速度传感器直接转矩控制技术成为了国内外学者研究的热点[4-7],人们相继提出了转子齿谐波法[8]、扩展卡尔曼滤波法[9]和模型参考自适应系统(MRAS)法[10]等速度辨识方法。文献[8]的转子齿谐波法估计转子转速方法比较简单,但是由于转子齿槽个数有限,而且磁阻变化很小,脉动电压的频率和幅值在低速时变得很小,此时速度估计变得很困难。文献[9]的扩展卡尔曼滤波法是通过使用噪声的信号对非线性动态系统进行实时递推最优状态估计,但是算法十分复杂,即使采用高性能的DSP,计算时间还是很长,尤其是在转速快速变化时,故难以实现实时控制。文献[10]的模型参考自适应法是根据转子磁链模型设计的一种速度观测器,但未考虑定子电阻的变化对速度观测的影响。尽管无速度传感器直接转矩控制的优良性能显而易见,但是电机温度在运行中升高时,定子电阻将发生变化,导致电磁转矩在低速时出现较大的脉动[11-12],从而影响速度的高精度辨识。为了克服以上不足,本文从异步电机数学模型出发,基于MRAS理论提出一种交互式转速和定子电阻之间相互转换的MRAS模型[13]来实现转速精确辨识,这种方法既解决了转速辨识问题又消除了定子电阻变化对直接转矩控制动静态性能的影响,使系统具有较宽的调速范围。
2 异步电机直接转矩控制基本结构
由电机学可知,异步电动机在静止α-β坐标下的定转子绕组电压平衡方程式为
定子电压方程:

转子电压方程:

式中:isα,isβ为定子电流矢量is的α,β分量;Ψsα,Ψsβ为定子磁链矢量Ψs的α,β分量;irα,irβ为转子电流矢量ir的α,β分量;Ψrα,Ψrβ为转子磁链矢量Ψr的α,β分量;usα,usβ为定子电压矢量us的α,β分量;Rs,Rr为定、转子绕组电阻;ωr为转子角速度;p为微分算子。
定子磁链方程:

转子磁链方程:

式中:Ls,Lr,Lm为定子电感、转子电感和定转子间互感。
电磁转矩方程:

运动方程:

式中:Te为电磁转矩;TL为负载转矩;J为转动惯量;np为极对数;Lσ为电机漏感,Lσ=(LrLs-L2m)/Lm;θ为定子磁链和转子磁链的夹角。
在直接转矩控制中,实际运行时保持定子磁链的幅值为额定值,以便充分利用电动机,而转子磁链幅值由负载决定。要改变异步电动机的转矩,可以通过改变磁通角θ来实现。因此,通过选择合适的电压空间矢量,控制定子磁链的走走停停,改变磁通角θ,达到直接控制转矩对电机调速的目的。无速度传感器直接转矩控制结构框图如图1所示。

图1 无速度传感器直接转矩控制结构框图Fig.1 Block diagram of direct torque control with speed sensorless
3 基于交互式MRAS的速度和定子电阻参数辨识
3.1 速度辨识
根据Popov超稳定性理论可将模型参考自适应系统变成由前馈和反馈两个部分组成的等价非线性时变反馈系统[14],如图2所示。

图2 标准非线性时变反馈系统Fig.2 Standard nonlinear variable feedback system

此时可求得待辨识参数的自适应算法为

将式(1)~式(4)合并后得到电机的电压模型:

同时可得到电机的电流模型:


在转子磁链电压方程式(8)中不包含转速,而电流方程式(9)中包含了待估变量转速。采用MRAS辨识方法,以电压模型作为参考模型,电流模型作为可调模型,利用2个模型输出量的误差构成自适应律,实时调节可调模型的待估参数,以达到控制对象的输出跟踪参考模型的目的。根据Popov超稳定性理论,可以求得转速r的自适应算法为

选择合适的比例、积分系数Kp和Ki可使自适应算法加快收敛速度,减小超调量和稳定时间。根据该方法,MRAS速度辨识框图如图3所示。

图3 基于转子磁链模型的MRAS转速观测框图Fig.3 Block diagram of speed estimation with MRAS based on rotor flux model
利用式(8)推算转子磁链时,必然会遇到积分运算的初始值设定问题和由测量误差、电动机参数变化引起的积分漂移问题,进而影响计算的精确度和系统的稳定性。为解决上述问题,在转子磁链方程式基础上,重新选择参考模型。
设电动机反电动势α,β分量为

励磁电流α,β分量为

代入转子电压方程(8)和电流方程(9),可得:

由以上模型可知,只要在电机运行时能准确测得电机定子电压和电流,就可以由式(11)构成速度辨识器的参考模型,式(12)和式(13)构成可调模型,这种辨识模型称为反电动势模型。在参考模型中不存在纯积分项,因此电机运行于低速域时速度辨识器具有一定的鲁棒性。利用MRAS理论选择适当的自适应调节律可获得转速估计值,但这种辨识器的参考模型包含有电机的漏感Lσ,当电机的漏感变化时,如果仍然采用其额定值来构成参考模型,势必会降低速度观测的精度。为消除电机漏感的影响,扩大速度辨识器的适用范围,在反电动势模型基础上,再定义一个新变量Dm及其观测值D^m如下:

将式(14)作为参考模型,式(13)和式(15)作为可调模型,这样构成一个新的模型参考自适应系统。参考模型中不包含纯积分项和电机漏感,电机稳态精度和调速范围都得到了提高。选择合适的自适应律获得较好的转速估计。
3.2 定子电阻辨识
在式(14)的参考模型中仍包含定子电阻,若电机温度在运行中升高时,定子电阻发生变化,将造成实际转速与辨识转速之间的误差,特别在低速时这种误差更大,严重影响了系统低速性能。本文将式(15)作为参考模型,式(14)作为可调模型构成定子电阻Rs的自适应辨识系统,在短时间间隔内速度可视为恒定,此时只对定子电阻进行辨识,同时2个模型交换作用,其误差驱动另一个自适应装置进行定子电阻辨识,使R^s收敛于实际值并更新Rs值。这样就解决了在低速域转速辨识和定子磁链观测受定子电阻参数影响较大的问题,进一步扩大了调速范围,提高了速度辨识的准确性和鲁棒性。由于式(14)和式(15)2个模型在转速和定子电阻辨识时作用是相互切换的,因而称之为交互式MRAS参数辨识。其结构框图如图4所示。
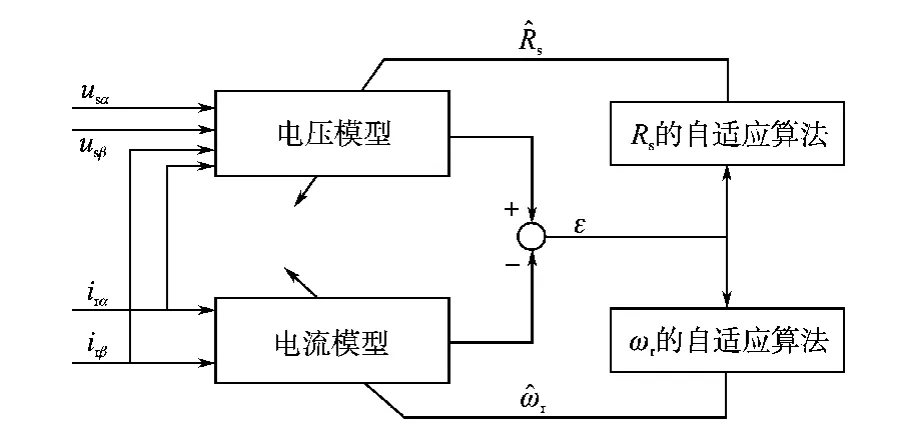
图4 基于交互式MRAS的转速和定子电阻辨识的框图Fig.4 Block diagram of speed and stator resistance identification based on mutual MRAS
4 仿真与实验结果
4.1 仿真结果
将以上交互式模型参考自适应方法用于直接转矩控制中,构成无速度传感器异步电动机直接转矩控制系统。用Matlab/Simulink软件对其进行仿真。仿真用到的异步电动机参数为:额定功率PN=1.5kW,额定电压UN=380V,额定频率fN=50Hz,额定转速nN=1 400r/min,转动惯量J=0.026 7kg·m2,电机极对数np=2,定、转子互感Lm=0.363H,转子自感Lr=0.386H,定子自感Ls=0.398H,转子电阻Rr=12.31Ω,定子电阻Rs=10.28Ω。给定定子磁链|Ψs|*=1Wb。
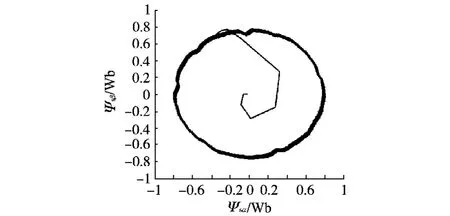
图5 无定子电阻辨识的定子磁链仿真波形Fig.5 Simulation waveform of stator flux without stator resistance identification
为了考察定子电阻对定子磁链的影响,仿真模型对定子磁链的轨迹进行了观测,图5和图6分别为无定子电阻辨识和有定子电阻辨识的定子磁链仿真波形,可以看出带定子电阻辨识的定子磁链与未辨识的定子磁链相比,其幅值更接近圆形,磁链幅值的波动较小,且较迅速到达磁链给定值,定子磁链观测精度提高。

图6 有定子电阻辨识的定子磁链仿真波形Fig.6 Simulation waveform of stator flux with stator resistance identification
图7为转子转速辨识仿真波形,其中曲线1是无定子电阻辨识的转速辨识波形,2是有定子电阻辨识的转速辨识波形,3是给定转速。可以看出,带定子电阻辨识的转速辨识与无定子电阻辨识的转速辨识相比,动态性能更好,转速阶跃响应几乎没有振荡,以及超调和稳定时间都比较小,而且转速的观测结果与实际转速值之间的误差很小。这是因为定子电阻的变化能及时在定子磁通方程式中得到反映,使得控制系统鲁棒性增强。

图7 转子转速辨识仿真波形Fig.7 Simulation waves of rotor speed identification
4.2 实验结果
为进一步验证理论分析和计算机仿真结果的正确性,进行了实验研究。上文提到的交互式MRAS参数辨识和直接转矩控制策略在以Microchip公司的dsPIC30F6010A为核心的电机控制开发平台上得到了实现,电机参数同仿真。
调速系统的给定负载转矩都设定为3.5N·m,转子磁链给定值为Ψ*r=0.9Wb。未对定子电阻辨识时的速度辨识和转矩变化波形如图8所示,有定子电阻辨识后的速度辨识和转矩变化波形如图9所示。图8、图9中的曲线1是转矩波形,2是给定负载转矩,3是转速辨识波形,4是给定转速。由图8可知在给定转速为梯型(0~12s)和阶跃型(14~26s)变化时转矩和速度辨识波形出现了较大的振荡,这是没有考虑定子电阻变化的结果。而由图9可知采用交互式MRAS方法对定子电阻辨识后的转矩和速度辨识曲线没有出现振荡,只有微小的波动,这说明辨识效果非常好。图8和图9的实验结果表明,与无定子电阻辨识控制相比,交互式模型参考自适应直接转矩控制可以实现在速度较低时对转速的高精度辨识,并且有效地减小低速时的转矩脉动,说明无速度传感器直接转矩控制系统在速度较低时具有良好的动静态性能。

图8 无定子电阻辨识的速度辨识和转矩变化曲线Fig.8 Rotor speed identification and torque variation curves when stator resistance is not identified

图9 有定子电阻辨识的速度辨识和转矩变化曲线Fig.9 Rotor speed identification and torque variation curves when stator resistance is identified
5 结论
本文基于模型参考自适应理论研究了一种交互式模型参考自适应转速和定子电阻的参数辨识方法。仿真和实验结果表明,该方案在消除了纯积分和漏感变化影响的同时,也消除了定子电阻变化对定子磁链和转矩的影响,实现了对转速的高精度辨识,从而改善了低速域直接转矩控制性能,使得电机在较宽的调速范围内有良好的性能。这种新的速度辨识方法具有结构简单、易于实现并继承了直接转矩控制系统鲁棒性强和动态响应特性好的优点。
[1] Faiz J,Sharifian M B B,Keyhani A,etal.Sensorless Direct Torque Control of Induction Motors Used in Electric Vehicle[J].IEEE Trans.Energy Convers.,2003,18(1):1-10.
[2] 王宇,邓智泉,王晓琳.无轴承异步电机的直接转矩控制技术研究[J].中国电机工程学报,2008,28(21):80-84.
[3] Lascu C,Trzynadlowski A M.A Sensorless Hybrid DTC Drive for High-volume Low-cost Applications[J].IEEE Trans.Ind.Electron.,2004,15(5):1048-1055.
[4] 奚国华,沈红平,喻寿益,等.异步电机无速度传感器直接转矩控制系统[J].中国电机工程学报,2007,27(21):76-82.
[5] 黄志武,桂卫华,年晓红,等.基于自适应观测器的无速度传感器感应电机控制[J].控制理论与应用,2007,24(6):913-918.
[6] 王坚,年晓红,桂卫华,等.新型异步电机无速度传感器控制方法[J].中国电机工程学报,2008,28(3):96-101.
[7] Zaky M S,Khater M M,Shokralla S S,etal.Widespeedrange Estimation with Online Parameter Identification Schemes of Sensorless Induction Motor Drives[J].IEEE Trans.Ind.Electron.,2009,56(5):1699-1707.
[8] Kiyotake H,Shinohara K,Yamamoto K.Rotor Speed Detection Method for Vector Control of Induction Motor Without Speed Sensor Utilizing Slot Harmonics[J].IEEE Trans.lA,2007,27(7):739-746.
[9] Barut M,Bogosyan S,Gokasan M.Speed-sensorless Estimation for Induction Motors Using Extended Kalman Filters[J].IEEE Trans.Ind.Electron.,2007,54(1):272-280.
[10]程善美,付中奇.基于自适应转速辨识的直接转矩控制系统研究[J].电力电子技术,2007,41(9):24-25.
[11]巫庆辉,邵诚.感应电动机定子磁场定向直接转矩控制中定子电阻自适应估计方法[J].机械工程学报,2006,42(6):24-29.
[12]刘军锋,李叶松.定子电阻对无速度传感器系统的影响及其在线调整[J].电气传动,2007,37(11):6-9.
[13]Li Zhen,Xu Longya.Sensorless Field Orientation Control of Induction Machines Based on a Mutual MRAS Scheme[J].IEEE Trans.on IE,1998,45(5):824-830.
[14]刘兴堂.应用自适应控制[M].西安:西北工业大学出版社,2003.
[15]樊后世,樊立萍.基于模型参考自适应的电机直接转矩控制研究[J].仪器仪表学报,2006,27(6):2004-2005.
修改稿日期:2010-11-17
Direct Torque Control of Induction Motor Speed Sensorless with Stator Resistance Identification
SHE Zhi-ting1,ZHENG Yong1,YUAN Jun-bo2,ZHANG Hong-mei2
(1.CollegeofElectricalandInformationEngineering,HunanUniversity,Changsha410082,Hunan,China;2.EducationMinistryKeyLaboratoryofElectricPropulsionandServoControl,HunanUniversity,Changsha410082,Hunan,China)
Based on the dynamic mathematical model of induction motor direct torque control,the mutual model reference adaptive system(MRAS)method for parameter identification was proposed to implement the rotor speed and stator resistance online identification by changing the roles of reference model and adjustable model used in the mutual MRAS scheme.Computer simulations and experimental results show that the method can obtain high-precision speed identification and solve the problems of dynamic and static performance of the system under the influence of stator resistance variation.The torque ripple of DTC at low speed is also improved.
induction motor;speed sensorless;direct torque control;mutual MRAS
TM343
A
佘致廷(1962-),男,博士,硕士导师,Email:shezhiting@yahoo.com.cn
2010-09-19
