双馈发电机励磁模糊控制实验研究
2011-04-25栾晓伟
李 岚 栾晓伟
(太原理工大学电气与动力工程学院,太原 030024)
1 引言
变速恒频发电就是在绕线异步发电机的转子侧施加三相低频交流电以实现交流励磁,通过控制励磁电流的幅值、频率、相位能够实现输出电能的恒频恒压。传统的控制方法要求对被控对象建立精确的数学模型,而且过于依靠准确的系统参数,稳定性方面有所欠缺。模糊控制的特点是以自然语言的形式对控制对象传达控制信息,无须精确的数学模型,且使自然语言能够转化为计算机所能接受的算法语言,优秀的实践操作经验和专家意见被引进到了控制系统之中,达到控制目的[1-2]。
本文根据双馈发电系统矢量控制的特点,设计了转速闭环二维模糊控制器,经过模糊推理计算及清晰化处理,得出转子有功电流分量。基于TMS320LF2812的双馈发电机系统实验平台,进行了转速环模糊控制试验,验证了转速闭环模糊控制器设计的正确性,实现了双馈发电机的变速恒频控制。
2 双馈发电系统数学模型
m-t坐标系下,定子侧基于发电机惯例,转子侧基于电动机惯例。
采用定子磁场定向矢量控制, 将定子磁链矢量1ψ方向作为m轴的正方向。根据文献[3]中的公式推导,可得双馈发电机矢量控制基本方程

由式(8)可知,sP、sQ与定子电流t、m轴分量tsi﹑msi成正比,调节tsi﹑msi即可独立地调节sP、sQ。
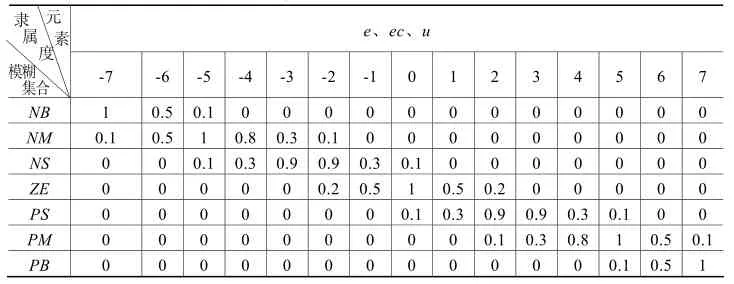
表1 语言变量e、ec、u的赋值表
3 模糊控制器设计
模糊控制器在常规控制器基础上,应用模糊集合理论,由模糊控制器输出最终控制结果,来保证电机在不同的运行状态下都能具有良好的动、静态性能[4]。
典型的模糊控制器组成如图1所示。
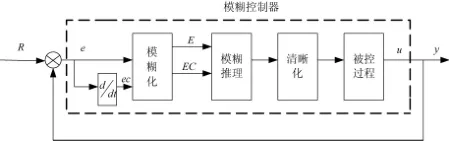
图1 模糊控制器系统方框图
3.1 论域及语言变量值
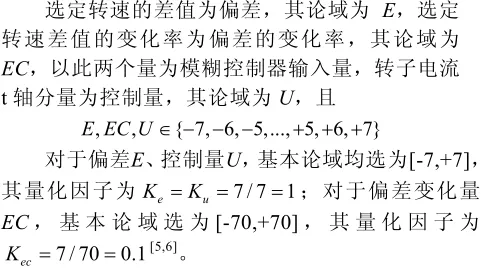
选取偏差E、偏差变化量EC、控制量U的模糊集均为{NB,NM,NS,ZE,PS,PM,PB},其中,NB、NM、NS、ZE、PS、PM、PB分别为负大、负中、负小、零、正小、正中、正大。
本系统中选隶属度为正态分布函数,并据此建立语言变量E、EC、U的赋值表如表1所示。
3.2 模糊控制规则
对于采用二维模糊控制器的模糊推理控制系统,其控制规则一般采用“IF andecTHENu”来描述,控制状态如表2所示。

表2 模糊控制状态表
3.3 清晰化
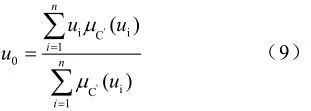
模糊推理得到的是一个模糊集合,它反映了控制语言的不同取值。但是,对于实际系统来说,被控对象只能接受一个确定的控制量,因此,必须将控制量变换为实际用于控制的清晰量0u。本文采用加权平均法进行清晰化计算,计算公式为
经计算可以得到模糊控制器控制量值的查询表,如表3所示。

表3 模糊控制器控制量值查询表
求得清晰量u0后,还需根据实验操作经验,经尺度变换,乘以系数0.66666,变为实际的控制量u',这就是模糊控制器的最终输出值,即转子电流的有功分量itr*,通过u'的调整控制作用,使偏差e尽量小。
4 模糊控制器软件设计
完成上述准备工作后,基于 TMS320LF2812的双馈发电机系统实验平台上,编写模糊控制器的程序,设计模糊控制器,系统试验平台如图 2所示。其程序流程图如图3所示。
5 实验结果
基于上述软、硬件,保证无功功率给定不变,在不同给定转速下,进行了双馈发电励磁模糊控制实验,测得模糊控制器输出量itr*及转子侧的电压。表4给出了给定转速n∗= 1385r/min 时模糊控制器输出量itr*、转子侧的电压分量及SVPWM电压旋转矢量幅值的关系。

图2 实验平台结构简图

表4 模糊控制器输出值与转子电压对照表
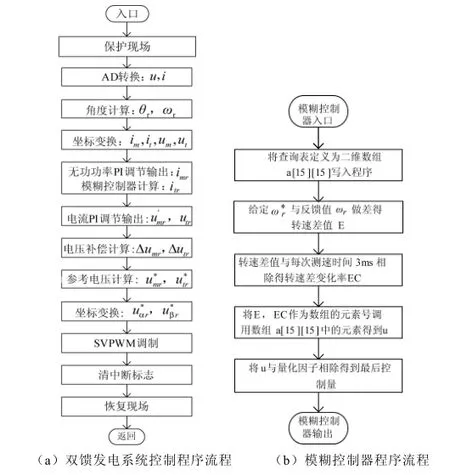
图3 系统程序流程方框图
根据公式(8)可得,当无功功率给定保持不变时,定子电流的m轴分量ims保持不变,再根据公式(4)可知,此时转子电流的m轴分量imr保持不变。在这种情况下,保持电机转速n不变,即保持转差角速度ωs不变,根据公式(6)、(7)可知,转子侧的电压分量只与模糊控制器的输出量itr*有关,即SVPWM电压旋转矢量幅值只与模糊控制器的输出量itr*有关。经过模糊控制器后,不同转速下转子侧线电压实测波形如图4所示。当转速发生变化时,双馈发电机定、转子电流变化波形如图5所示。
由实验结果可以看出:
(1)转差角速度ωs不变,转子侧SVPWM电压旋转矢量幅值与转子侧电压分量随着模糊控制器输出量的变化而变化,可见,模糊控制器通过调节器输出量itr*,达到了控制转子侧电压的目的,即模糊控制器的作用符合公式的理论推导,在系统调节中起到了作用。
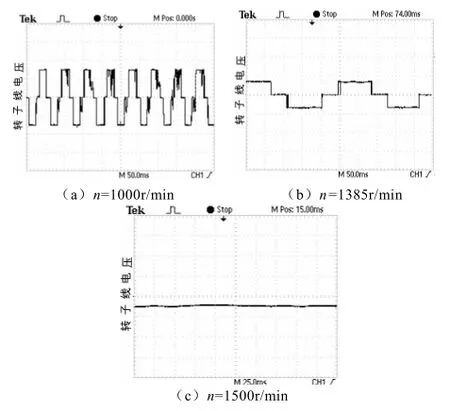
图4 不同转速下转子侧线电压波形
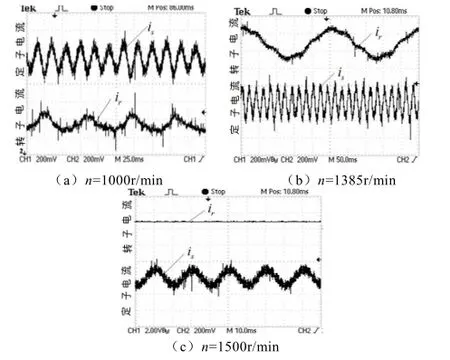
图5 不同转速下定﹑转子电流波形
(2)给定转速变化时,模糊控制器输出电流分量及转子侧的电压都会相应变化,从而使转子侧电流频率改变,保证了定子输出电流频率的恒定。
6 结论
模糊控制是一种非线性控制方式,具有较强的鲁棒性,特别适用于控制方式复杂、实际控制系统所在自然环境不易把握、系统稳定性要求高而数学模型却非线性、多耦合的生产过程。本文在分析了双馈发电机变速恒频交流励磁系统原理的基础上,基于其控制平台,设计了转速闭环的模糊控制器,并通过实验,证明了此控制器完全满足双馈发电机变速恒频运行的控制要求,为双馈发电系统模糊控制的进一步研究奠定了基础。
[1] 章卫国,杨向忠.模糊控制理论与应用[M].西安:西北工业大学出版社,1999.1:48-63.
[2] Slootweg J G, Haan S W H, Polinder H, et a1. Aggregated modeling of wind parks with variable speed wind turbines in power system dynamic simulations[C]. 14thPSCC. Sevma,2002.
[3] 李岚,曹天明.变速恒频双馈风力发电机的功率控制[J].太原理工大学学报,2010,3(41):290-292.
[4] 刘福才,韩会山,陈丽.基于DSP的异步电机模糊控制系统编程[J].电机与控制学报,2006,10(1).133-137.
[5] 李岚,王秀丽.风力发电有功功率模糊控制器的设计[J].太阳能学报,2007,11(28):1272-1277.
[6] 林渭勋. 现代电力电子技术[M].北京:机械工业出版社,2005.
