用于太阳能电池板的自动测试分选应用工程
2011-04-10朱鹏涛刘东斌
朱鹏涛,刘东斌,卫 兵
ZHU Peng-tao,LIU Dong-bin,WEI Bing
(北京机械工业自动化研究所,北京 100120 )
0 引言
当电力、煤炭、石油等不可再生能源频频告竭,能源问题日益成为制约国际社会经济发展的瓶颈时,越来越多的国家开始开发太阳能资源,寻求经济发展的新动力。中国蕴藏着丰富的太阳能资源,太阳能利用前景广阔。
太阳能电池板是太阳能发电系统中的核心部分,也是太阳能发电系统中价值最高的部分。其作用是将太阳的辐射能力转换为电能,或送往蓄电池中存储起来,或推动负载工作。太阳能电池板的质量和成本将直接决定整个系统的质量和成本。由于太阳能板薄、质地脆,容易造成碎片及隐裂,国内外对于太阳能电池板的测试目前还没有成熟的解决方案。
1 系统概述
本系统由工件测试工位和分拣码垛工位组成,如图1所示。
工件测试前先将接线适配器安装到工件上,工件测试工位通过上料操作台输入的工件种类、模拟器的工作状态(是否充电完成),工件是否到位等条件给测试机器人发送相应的程序号,测试机器人读取程序号,通过示教完成对不同程序运行轨迹的编制,实现了抓取、扫码、模拟仪测试、放置等工作过程。测试机器人将太阳能测试模拟仪测试后的工件放置到传送辊道后进行耐绝缘自动接电测试。测试完成后,辊道自动运转,将工件传送到贴标工位。到达后工人能够根据分档指示屏的指示,对相应的太阳能板进行贴标,完成后工人将适配器卸下。
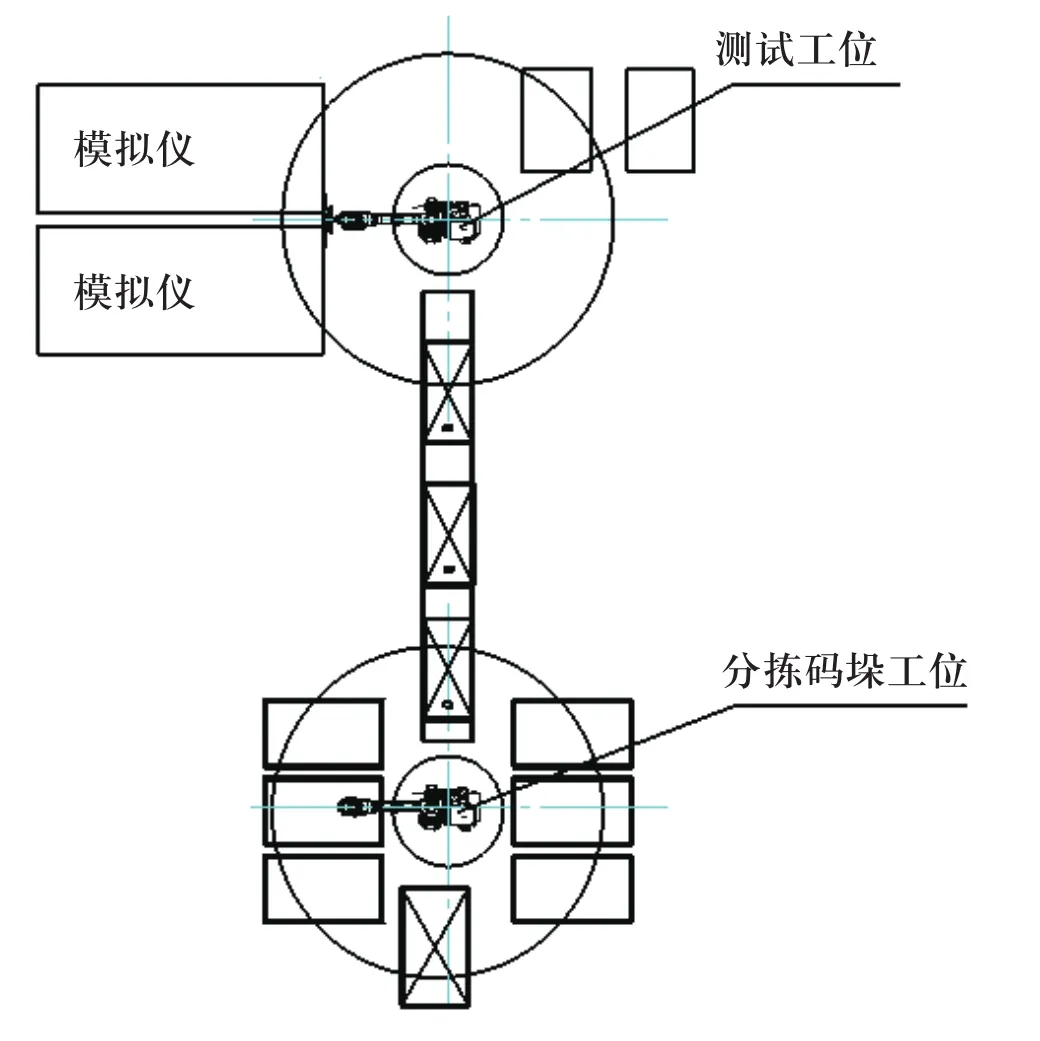
图1 自动测试分选系统布置图
分拣码垛机器人在工件分拣码垛工位抓取太阳能电池板进行条码读取,读取完成后 PLC根据条码信息从数据库中查找该组件的详细信息,完成后发送的相应的工件品种及工件的垛位号传给分拣码垛机器人并进行分档。机器人通过示教实现自动分拣码垛工作,通过机器人内部累加器记录工件数量。当每垛工件到达20块,自动报警,通知操作人员更换托盘并将累加器清空。通过WINCC上位机将分档数据自动保存到EXCEL文件中,完成整个太阳能电池板自动测试、分选。
2 结构介绍
2.1 ABB IRB 6640机器人简介
ABB IRB 6640型机器人融合了第二代TrueMove和QuickMoveTM技术,运动精度更高,进一步缩短编程时间、优化工艺效果,操作更加灵活,在国内已得到广泛采用。
IRB 6640-130型机器人技术参数如下:
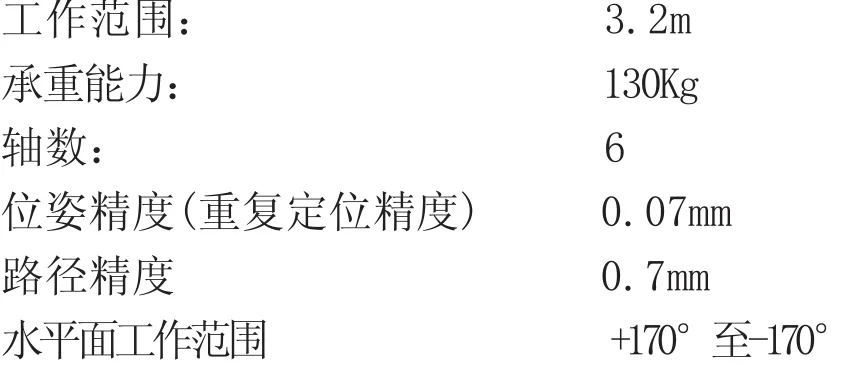
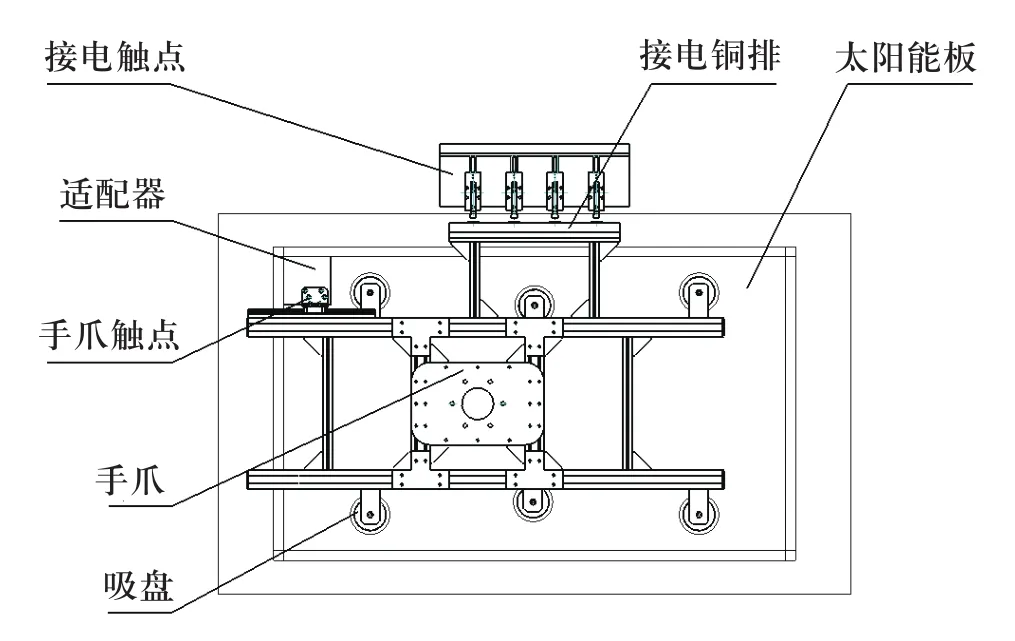
图2 接电测试装置图
2.2 接电测试装置
由于测试电池板对测试线的电阻有严格的要求,电阻不能超过模拟仪要求的电阻,而测试线从机器人手爪经机器人本体再连接到模拟仪,长度超过了10米,测试线自身的电阻就超过了要求的电阻。
本系统的接电装置设计分为适配器,接电铜排和接电触点三部分,测试工作状态如图2所示。太阳能电池板由人工安装适配器并与电池板上接线盒导线连接。机器人抓取太阳能电池板测试时,手爪触点与适配器接触连接,使接电铜排与电池板导通。
机器人抓取电池板到测试工位时,使接电铜排与接电触点连接,模拟仪装在接电触点上方。通过使用接电装置,测试线不用经过机器人本体,大大地缩短了测试线的使用长度,降低了电阻,满足了模拟仪要求。
2.3 机器人抓取装置
由于电池板薄、质地脆,导致抓取过程容易造成隐裂。本系统采用柔性真空吸盘抓取工件,选用了内部带支撑的吸盘,使吸盘在工作时有足够的支撑面积,避免对电池板造成损伤。
吸盘的布置尽量靠近边框,中间一对吸盘与两边吸盘错开,不在一条直线上,实验证明,这种布置也可减少隐裂的发生,使隐裂概率降到万分之一以内,满足了电池板大规模测试的要求。
3 控制系统介绍
系统采用西门子S7-300系列PLC作为控制工作站主站,通过Profibus-Dp总线控制条码阅读器、太阳能测试模拟仪及ABB机器人等设备,采用TCP/IP总线协议与太阳能测试模拟仪通讯。
测试机器人通过示教完成太阳能电池板自动抓取、扫码、测试、放置,放置后的组件信息(ISCVOCPMVMIMFF)与条码自动绑定,实现太阳能电池组件测试队列的建立。
分拣机器人通过示教完成太阳能电池板的抓取、扫码、分拣等工作,当太阳能电池组件扫完完成后,根据条码会在测试队列中查询相应测试信息传输到上位机数据库中。上位机采用研祥工控机,使用WINCC v6.2软件通过OPC Server与EXCEL通讯,通过EXCEL宏处理整理数据库数据,完成最终与企业ERP系统的联接。
4 结论
随着太阳能行业的发展,传统的人工测试已经无法满足大规模生产的需要。机器人自动测试分选工作站会逐步取代人工,应用到太阳能组件的测试分选作业中。
本文介绍的测试分选工作站,已成功应用于现场。大大提高了生产效率,降低了人工成本,产生了巨大的经济效益,在太阳能行业,机器人自动化应用领域,达到并保持国际先进水平。提高了国产太阳能产品在国际市场的竞争力,促进了国产太阳能企业的良性发展和技术创新。
