超短基线水下声学定位数据处理
2011-03-26吴学文包更生陶春辉顾春华张恺
吴学文,包更生,陶春辉,顾春华,张恺
(国家海洋局第二海洋研究所海底科学重点实验室,浙江杭州310012)
0 引言
水下定位技术是解决水下作业的前提与关键。目前,法国Ixsea、挪威Simrad、英国Sondardyne等公司都推出了中深水的商用超短基线水下声学定位系统产品,但对其数据的处理与应用则很少提及[1-3]。国内只有少数机构在进行水声定位技术的研究,到目前为止,没有成熟的产品,大部分都限于国外引进。本文便是以“大洋一号”装备法国Ixsea公司的Posidonia 6000深水超短基线为例,在介绍超短基线定位原理的基础上,依据水下目标相对位置x、y、z3向在时间轴上各自的分布来识别定位跳点、并采用合理的数据结构与算法,实现对跳点的交互式剔除,得到可信的水下声学定位数据;这一部分已开发出成熟的处理软件,并在中国大洋第21、22航次近700天的海上作业中得到了充分的应用[4-6]。
1 超短基线水下声学定位原理
超短基线定位系统通过测量从水下应答器(简称目标)到船底换能器阵(简称基阵)的声波传播时间(简称测时)来计算目标的斜距r,通过测量从目标到达基阵各水听器的声波相位差(简称测相)来计算目标的俯仰角和方位角,从而确定目标相对基阵的相对位置(x,y,z);最后通过(x,y,z)和基阵的GPS大地坐标换算出目标的大地坐标。
由于船底换能器基阵的尺寸很小(d<<r),可按近似平面波场来处理;同时依据船底换能器阵与水下目标间的几何关系下声波传播的波长;d为船底换能器基阵的阵元间距;ψ为船底换能器阵x轴相邻基元接收信号相位差;ξ为船底换能器阵y轴相邻基元接收信号相位差。
超短基线实际的测量值为斜距r和相位差ψ、ξ。斜距r通过回波测距测得,具有很高的精度;目标的相对坐标(x,y,z)是其最终的水下大地坐标唯一的制约因素,其精度主要取决于相位差ψ、ξ的测量[2]。
2 超短基线水下声学定位数据处理
超短基线水下声学定位系统在实际的现场作业中,既会受到涌浪、风、海流等不同的自然环境影响,又会受到船载多波束、ADCP、浅地层剖面等同时作业的声学系统影响,更会受到母船船泊动力定位系统的干扰,导致不可避免的出现:(1)在其解算出的定位数据中存在跳点;(2)在动态测量环境下长时间不能给出定位数据,形成一个时段内定位数据空白的现象。为满足现实作业需求,给水下目标上的各传感器提供可信的定位信息,本文依据水下目标x,y,z3向在时间轴上各自的分布,采用交互式剔除的方法来排除粗差定位点,并在此基础上介绍了基于航位推算的定位数据匹配方法,以实现对水下目标定位数据稀少时段进行补足,从而提升水下定位数据的效率。
2.1 定位数据介绍
Posidonia 6000超短基线定位系统的原始记录文件是按设定的定位周期为单位,每周期内包含PTSAG、PTSAX等多个固定字段的ASCII文件。可参阅随厂的操作手册[3、4]对原始记录文件进行数据抽取。本文主要提取原始记录中每组定位数据的“日期、GMT时间、母船经纬度、拖体经纬度、X、Y、Z、斜距DTG(r)”信息,采用文件头说明及数据行的ASCII方式写出原始记录的提取数据文件,作为本文的研究对象。
2.2 定位数据跳点的识别与剔除
跳点,又叫野值点、异常点,是指在一条测线资料中相对少数明显与周围测量值有较大出入,而且与实际不符的一些测量值点[5]。水下定位跳点数据的剔除,通常采用直接对最终水下大地坐标经纬度进行处理,其手段有:(1)直接在经纬度平面分布图上剔除其外围的散点,这存在两个问题。1)由于存在较多不同时段的跳点刚好落在另一时段的密集区内而导致剔除不彻底;2)“外围”边界是个很模糊的概念,难以找到准确依据加以确定,如图1所示。(2)通过拟合或滤波等手段对异常点进行剔除,也存在两方面问题:一方面是作业时不同时段受干扰的程度不同,不能使用统一的拟合参数或滤波参数;另一方面是所有异常点都参与运算,相当于用异常数据来剔除异常数据。
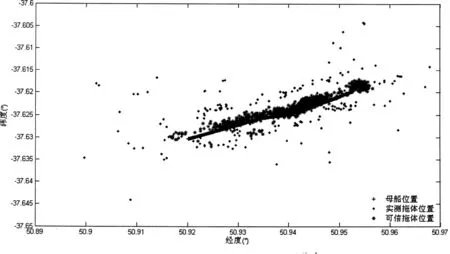
图1 母船与水下目标(拖体)位置分布
本文从现场作业中寻找依据、采用更易于操作的方法来实现对定位数据中的跳点进行识别并剔除。其基本思路是选用更为直观的过程数据x,y,z作为判断对象,利用定位原理中x,y,z的相互制约关系,依据x,y,z3维各自的时间系列分布,如图2所示来识别跳点,并采用快速有效的交互方式将跳点剔除。
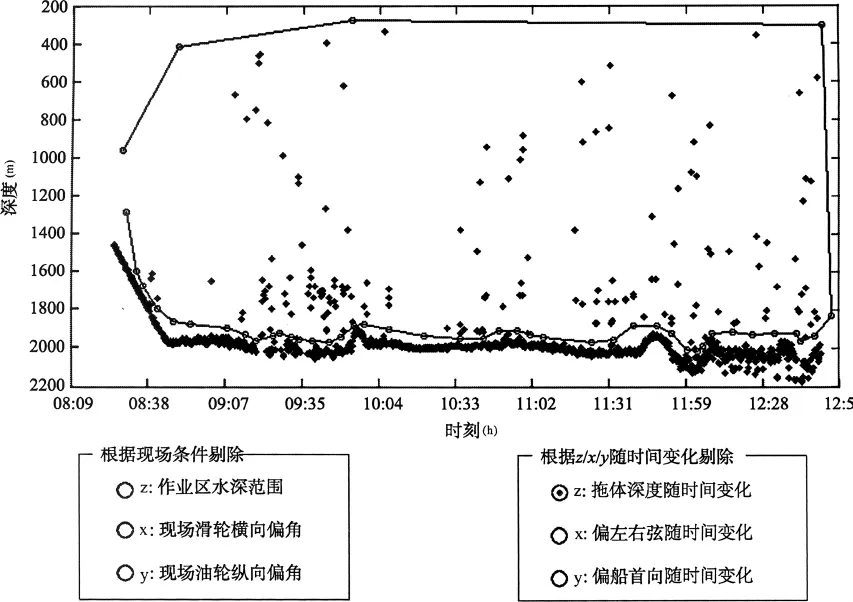
图2 定位数据跳点识别与剔除的操作截屏
交互式剔除的基本思想是通过人来判断定位数据是否应该剔除,并通过表述来剔除这些数据。只要选取更易于判断的对象,采用人性化的表述方式,该方法能彻底、快速有效地剔除异常定位数据。本文回避对水下目标最终的大地坐标经纬度进行判断,以(x,y,z)三维各自的时间系列分布图作为判断对象更易于对跳点的识别,受干扰的异常定位数据的三维分量中至少有一个在时间系列分布图上明显偏离前后相邻的未受干扰定位点。在表述方式上,本文采取直接在时间系列分布图上用鼠标圈定出任意多边型(左键取点,右键自动闭合多边型),图2中圈在多边型内的点为异常定位数据点,自动被剔除[1]。
软件设计的总体目标:(1)不改变Posidonia 6000显控记录软件ABYSS记录的原始文件及其提取数据文件,每次编辑完成后,自动生成测线的编辑工程文件、剔除后的有效定位数据文件;(2)支持对定位数据点的剔除、每步剔除后可即时获得剔除前后相关数据的对比图;(3)支持对执行过剔除操作的数据的恢复,对于误剔除的数据可采用相同操作对数据进行选择性的恢复;(4)支持原始数据提取批处理功能,支持按“三维剔除模型”剔除异常定位数据的批处理功能。
本文按设计目标实现了图2中超短基线快速后处理软件设计功能。软件主菜单中的“数据”主要完成单一、批量、同一测线的原始记录数据的数据提取工作;“编辑”主要提供:(1)重复编辑历史数据的入口;(2)实现数据剔除与数据恢复的转换;“图件”提供提取各种图件,方便对原始数据的评价、交互式剔除结果的比较分析,图2仅展示其中的一项;“帮助”提供软件的使用说明和版本信息。通过z、x、y三维的交互式剔除达到要求后,保存退出。软件自动写出两个文件:其一为工程文件,即在所有原始数据列后添加“是否为异常点列”,方便对同一数据不同研究目的的多次交互式剔除;其二为结果文件,即写出所有可信的水下定位数据。
2.3 定位数据匹配
只有给水下目标上搭载的传感器匹配准确的定位信息,其探测出的属性数据才具有独立分析和使用价值。水下目标在下水作业前,需将各传感器的系统时钟均设置为GMT时间并对时;作业结束,出水后以时间为索引、在剔除跳点后的离散定位点基础上,对各传感器进行定位数据的匹配,以满足各传感器不同采样频率的定位匹配要求,从而最大限度的提升数据的使用效率。设需要匹配时刻ti的位置(xi,yi),记为(ti,xi,yi),超短基线水下声学定位周期为tcycle,并在其有效定位数据中,与时刻ti相邻的前一定位点(t0,x0,y0)、后一定位点(t1,x1,y1),理论上介绍定位数据匹配方法。
水下目标上通常搭载有LADCP或DVL[6]、MRU等传感器。LADCP、DVL这类传感器能测出水下目标相对海底的运动速度、具有较高的采样频率,能在短时间内给出水下目标的相对位置测量,而超短基线有效定位数据则能在较长时间段内给出水下目标的绝对定位数据。将两者充分结合便可在定位数据匹配上取得较好的效果。
利用已知起点、终点的坐标(超短基线系统给出)和海底探测系统的对地速度和运动方向(DVL、MRU给出)推算海底探测系统当前时刻的位置,如图3所示。
由于水下目标不带有加速度计,但DVL采样率较高,可以假定在距离di时间段内加速度ai不变,则:
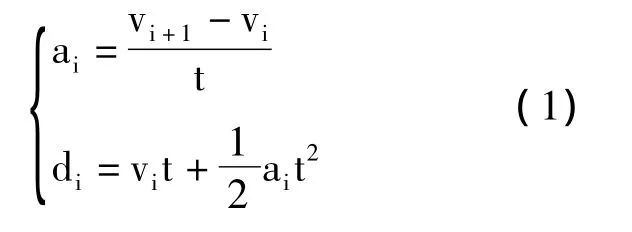
式中,ai为ti到ti+1时间段内的加速度;di为海底探测系统在ti到ti+1时间段内运行的距离,t为采样间隔时间,t=ti+1-ti;vi为ti时刻的DVL测量速度。水下目标在ti时刻的位置可表示为:
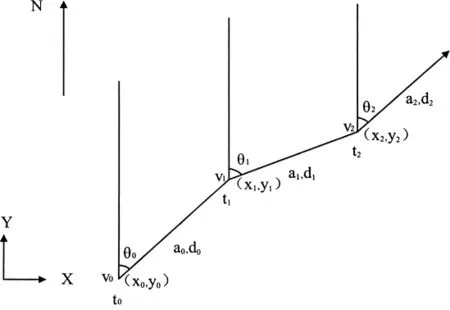
图3 航位推算法原理

式中,θi为ti时刻水下目标的真航向,由运动参考单元的罗经测量得出。
3 结束语
本文以“大洋一号”已装备的Posidonia 6000超短基线为例,在介绍超短基线定位原理的基础上,从过程数据(x,y,z)入手,依据水下目标x,y,z3向在时间轴上各自的分布来识别定位跳点、并实现对跳点的交互式剔除,做到对超短基线水下声学定位数据的“去伪存真”。最后从理论上阐述了基于航位推算法的定位数据匹配方法,从而提升水下定位数据的效率,以满足现场作业中对水下定位的更高需求。
[1]吴学文,包更生,张恺.热液硫化物现场调查中超短基线异常定位数据的快速剔除[J].热带海洋学报,2010,29(4):165-169.
[2]喻敏,惠俊英,冯海泓,等.超短基线系统定位精度改进方法[J].海洋工程,2006,24(1):86-91.
[3]Ixsea Oceano Sas.Posidonia6000 User Manual[P/CD].http://www.ixsea-oceano.com,2003-10-01.
[4]Ixsea Oceano Sas.Posidonia features and benefits[EB/OL].http://www.ixsea.com/en/products/14/posidonia.html,2009-02-06.
[5]吴学文,高金耀,包更生.走航测线数据跳点的剔除[J].海洋测绘,2007,27(4):44-46.
[6]Teledyne Rd Instruments.Workhorse Commands and Output Data Format[P/CD].http://www.adcp.com,2001-08-01.
