DSP在电机控制系统中的应用
2011-03-20周崐黄友桥曹晨
周崐 黄友桥 曹晨
(1. 海军驻湖南地区军事代表室,湖南 411101;2. 中国船舶重工集团公司第701研究所,武汉 430070)
1 引言
随着工业电气传动、自动控制和家电领域对电机控制产品需求的不断增加,现代电机控制技术也变得越来越重要。在DSP(Digital Signal Processing)技术被大量应用之前,电机控制系统中的数字化处理都是由单片机来完成的。单片机将计算机的基本组成部件集成于一片硅片之上,且内部具有许多适用于控制目的的功能部件,如51系列和MCS96系列,加上其成本低廉,软硬件资源丰富,易于开发的优点,因而它的出现迅速占领了电机控制等众多工业应用领域。目前,在不涉及复杂计算的场合,单片机仍然占据主要位置。
但是随着现代控制理论的发展和众多先进控制技术的出现,单片机已经难以胜任一些控制任务。为了实现高精度的、实时的控制,现代控制算法大都涉及到坐标变换,转子磁链模型计算,转子参数辨识校正,并且任务中常常带有多单元的实时通讯,与PC机的远距离控制等众多的功能,而单片机的计算速度,内部资源都已经不能满足这样的任务。
近几年来,基于DSP的电机专用集成电路由于在计算速度、容量存储等方面比单片机具有更优的性能,已逐渐代替单片机运用于电机控制系统中。本文以现在使用比较广泛的无刷直流电机和TI公司的TMS320LF2407这一款DSP为例,详细介绍了DSP在电机控制中的应用。
2 永磁无刷直流电机控制器
永磁无刷直流电机是近年来迅速成熟起来的一种新型机电一体化电机。该电机由定子、转子和位置检测元件及霍尔传感器等组成,既具有交流电机的结构简单、运行可靠、维护方便等优点,又具有直流电机运行效率高、功率密度大、调速性能好的优点,而且不受机械换相限制。其运行特点是每60°换相一次。永磁无刷直流电机系统如图1所示。其理想的反电势波形是具有120°电角度平台的梯形波,并由120°方波电流(相电流)供电,其方波电流和梯形波反电动势如图2所示。
永磁无刷直流电机的控制系统,除要求具备高性能的控制器之外,还可以通过控制器的设计在某种程度上弥补电动机性能之不足。图3为基本原理图。
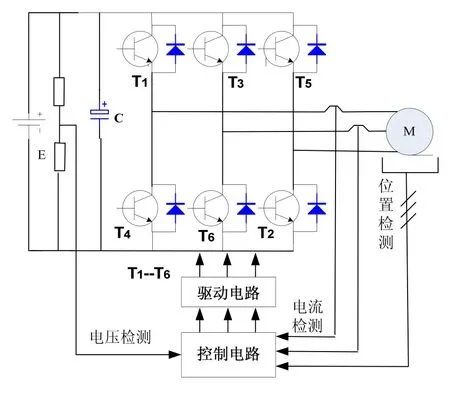
图1 永磁无刷直流电机系统图
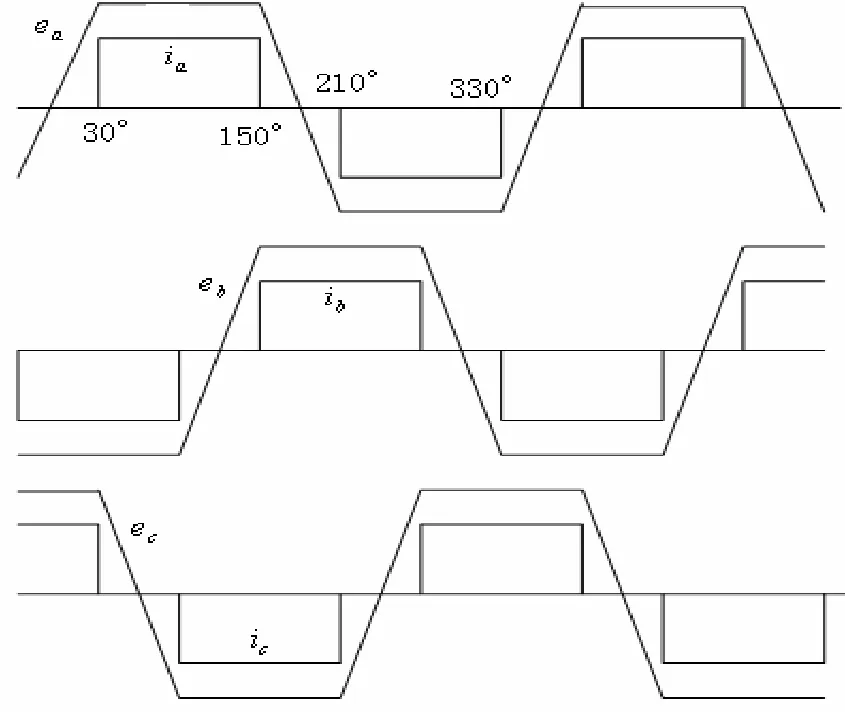
图2 BLDCM方波电流和梯形波反电动势
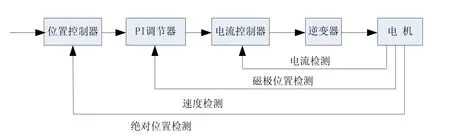
图3 电机控制基本框图
其中,位置环的作用是产生速度指令并使电机准确定位。通过设定的目标位置与电机的实际位置相比较,利用其偏差通过位置调节器来产生电机的速度指令,在小偏差区域,产生逐次递减的速度指令,使电机减速运行直至最终定位。速度环的作用是保证电机的转速与指令值相一致,消除负载转矩扰动等因素对电机转速的影响。速度指令与反馈的电机实际转速相比较,其差值通过速度调节器产生相应的电流参考信号的幅值,电流参考信号幅值与通过磁极位置检测得到的电流参考信号相位相乘,即得到完整的电流参考信号(通常使电流参考信号与反电势同相位),该信号控制电机加速,减速或匀速,从而使电机的实际转速与指令值保持一致。速度调节器通常采用的是PI控制方式,对于动态响应,速度恢复能力要求特别高的系统,可以考虑采用为结构控制方式或自适应控制方式等。电流环由电流控制器和逆变器组成,其作用是使电机绕组电流实时,准确的跟踪电流参考信号,电流控制器主要有线性电流控制器,滞环电流控制器和预测电流控制器三种。
目前,无刷直流电机控制系统经常采用的电力电子器件主要有功率场效应管 MOSFET和绝缘门极双极型晶体管 IGBT。其二者均具有电压控制,驱动功率小,并联容易,工作频率高的特点。IGBT通态电阻要比MOSFET小得多,且其具有很高的耐压和工作电流。
无刷直流电机控制系统需要有转子位置和速度的传感器来为其提供三环反馈信号。比较常用的传感器有霍尔集成电路传感器,混合式光电编码器;增量式光电编码器,增量式磁编码器,多转绝对式光电编码器,旋转变压器。
3 TMS320LF2407简介
TMS320LF2407是美国 TI公司推出的电机微控制器 TMS320LF240系列最常用的一种。它具有DSP内核,其高度集成度减少了控制器的外围电路,能将DSP的高速运算能力与面向电机的高效控制于一体,在实现电机控制上具备强大功能。
(1) PWM输出和功率驱动。LF2407的PWM发生电路可产生6路具有可编程死区和可变输出极性的PWM信号,直接控制电机驱动器,死区时间可由死区控制寄存器设置,其最大特点是它可以提供空间电压矢量输出模式。
(2) 电流检测。LF2407内部有2个10位8通道AD转换器,电流检测从电流互感器采样,经隔离放大器调理后送到内部高速 ADC转换,进行反馈控制。
(3) 转速位置反馈。LF2407内含的可编程独立的I/O引脚,捕获口,外部中断可方便的进行数字量操作。内部的4个捕获单元输入端用软件定义为QEP方式,可对脉冲前后沿进行计数,得到电机转速,通过变相电路判别两路信号的次序,得到电机的转向。
(4) 保护电路。为保证系统中功率转换电路及电动机驱动电路工作的可靠性,LF2407提供了PDPINTA和PDPINTB两个功率驱动保护中断输入引脚,当电机驱动不正常时,如出现过电压,过电流等,该中断有效,将PWM输出引脚置为高阻态。
(5) 通信。LF2407内部包含有串行通信接口SCI模块和CAN控制器模块。SCI模块支持CPU与其他使用标准格式的异步外设之间的数字通信。CAN控制器模块提供了一种有效支持分布式控制或实时控制的串行通信局域网络。
4 基于 DSP的无刷直流电机控制系统的硬件设计与软件实现
4.1 控制系统硬件设计
由以上基本知识,按照电机特点设计的系统结构如图4所示。它包括以下几个基本环节。
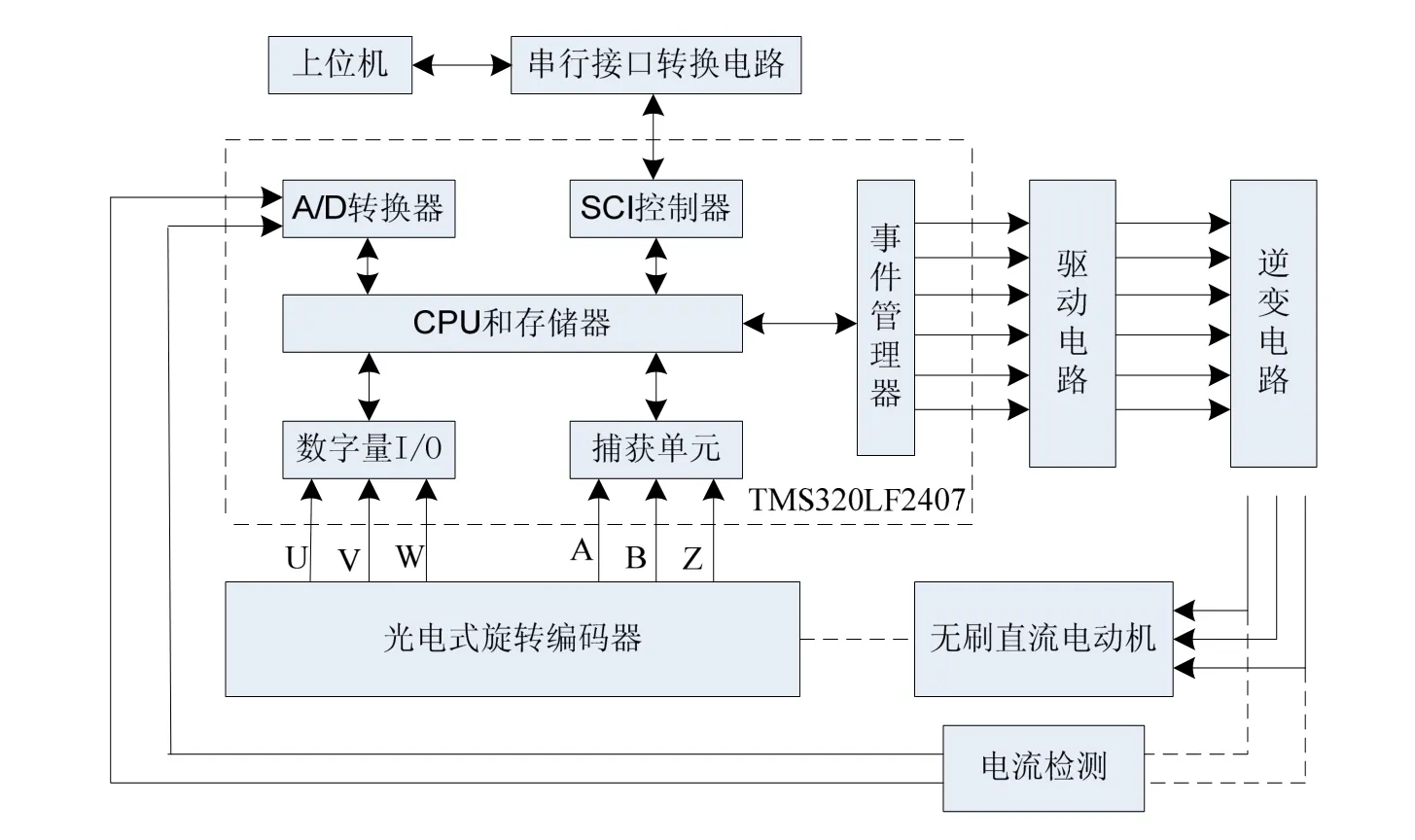
图4 控制系统硬件设计
(1) 驱动电路。主回路可采用七单元集成化智能功率模块作为系统的主开关功率器件,三个桥臂的6个IGBT驱动单元利用高速光耦实现隔离接口。
(2) 电机相电流检测电路。利用闭环型霍尔元件式电流传感器检测电机两相电流,再利用采样电阻和多级运放将电流信号处理在0-3.3v间变化的模拟电压信号,与集成在TMS320LF2407内的A/D转换器外引脚相连接。
(3) 转子位置检测电路。电动机的转子位置和转速检测使用增量式光栅编码器,其输出信号送入DSP的I/O口和QEP单元,通过位置的微分运算得到转速信号。
(4) 保护电路。TMS320LF2407的事件管理器提供了外部中断 PDPINT来实现对系统的保护。系统可将过流,过温,电源故障等保护信号处理为多路低电平有效的信号,把上述信号相“与”后的输出接DSP的PDPINT引脚。系统故障时,片内固化的PDPINT中断程序自动切断系统的PWM输出,直到故障消失和系统复位。
(5) 串行通讯电路。要实现上位PC机对整个控制系统的监控,可用串行通讯专用芯片MAX232和DSP内部的SCI控制器完成串行接口总线的数据通讯。如果有分布式的多控制器,则可以选择DSP内部集成的CAN控制器来完成通讯任务。
4.2 控制系统软件设计
基于上述永磁同步电动机全数字化矢量控制系统的控制软件,包括初始化程序,主程序和中断服务子程序3个部分。系统在每次复位以后,首先执行初始化程序,实现对DSP内部各功能模块工作模式的设定和初始状态的检测,在完成上述工作后,中断开启,系统执行主程序。同时,当外部中断条件满足时,系统执行中断服务子程序。系统的主要控制功能是由主程序,串行通讯子程序和定时中断子程序来完成的。其中,电机的主要控制策略由定时器中断子程序来执行。在这2个中断服务子程序中,外部保护中断子程序优先级较高。
(1) 主程序的基本功能。主程序是系统控制软件在完成初始化之后进入的一段循环执行的程序,它除了调用串行通讯子程序之外,主要是执行系统的巡检功能,即执行对系统状态,电机和散热底板温度以及直流母线上电解电容电压等的检测,通过设置一定的标志,实现控制回路的动作或状态参数的上传。
(2)中断子程序中控制策略的实现。控制软件通过在初始化程序中设置事件管理器的相关寄存器,就可以在允许中断触发后,每隔一定的时间间隔中断主程序的执行。该时间间隔通常与PWM 的调制频率有关,如调制频率为 10kHz,因此定时器中断程序执行的时间间隔为 100ns。这样通过对定时器中断子程序的循环执行,即通过对矢量控制算法的循环执行,就实现了对电机的控制。
(3)通讯子程序。LF2407的 DSP具有 SCI的串行通讯功能和支持分布式网络的 CAN控制器,因而通讯程序的结构是与通讯协议一一对应的。
(4)外部中断保护子程序。当 PDPINT引脚电压由高电平变为低电平,固化与片内的中断服务程序切断DSP的PWM输出,使控制器死机。该中断是硬件中断,不受软件设置的影响,但中断发生是,如果软件有所设置程序将自动跳到外部中断保护子程序的起始执行部分。
5 结论
目前,DSP器件具有较高的集成度,精简的指令系统,独立的程序和数据空间等使其具有高速的数据运算能力,采用基于DSP的电机专用集成电路的另一个好处是,可以降低对传感器等外围器件的要求。在高速控制中,使用DSP可以进行通常的位检测和逻辑运算以及高速数据传输。随着DSP器件的价格日益下降,性能不断提高,采用 DSP器件代替单片机来控制电机将成为电机控制的发展趋势。
[1] MS320C24x DSP Controllers Reference Set, Volume2:Peripheral Library and Specific Devices [Z ].USA:Texas Instruments, March, 1997.
[2] Texas Instruments. F241/ F243/ C242 DSP controllers reference guide, system and peripheral, 2000. 2-2~2-21.
[3] 尹泉, 余高明, 万淑芸. 基于DSP的永磁无刷直流伺服电机全数字控制系统. 电力电子技术, 2001,6.
[4] 李先祥, 斯燕跃. 无刷直流电机的单片机监控系统的研制. 电气传动自动化, 2002, 2.
[5] 彭军, 杜复旦, 管伯良. 无刷直流电机的 DSP控制.机电一体化, 2000, 2.
[6] 李威震. 无刷直流电机及应用研究. 连云港职业技术学院学报, 2000,6.