机载拖曳式雷达有源诱饵对抗方法研究与仿真
2011-03-20农春丽
农春丽
(西安电子科技大学电子工程学院,陕西西安710071)
拖曳式雷达有源诱饵(Towed Radar Active Decoy,TRAD)干扰是一种新的自卫干扰方式,它是指由空中运动的飞机通过拖缆牵引、对敌方威胁雷达产生射频干扰的一种特殊电子装备。当飞机使用拖曳式雷达有源诱饵时,由于出现了第二个射频源,所以导弹的角度误差会发生畸变。如果飞机和拖曳式诱饵在距离、速度或角度上分辨不出来,那么导弹导引头的响应会成为两个RF源的复杂函数,这将产生一个角度误差,从而增加了导弹的脱靶距离,提高了飞机的生存能力[1]。因此拖曳式诱饵已成为飞机躲避精确制导导弹的有力手段之一。
1 拖曳式诱饵工作原理
如果将载机散射回波作为一个源,则最简单的非相干干扰方法就是在载机附近配置一个干扰源,如图1所示。
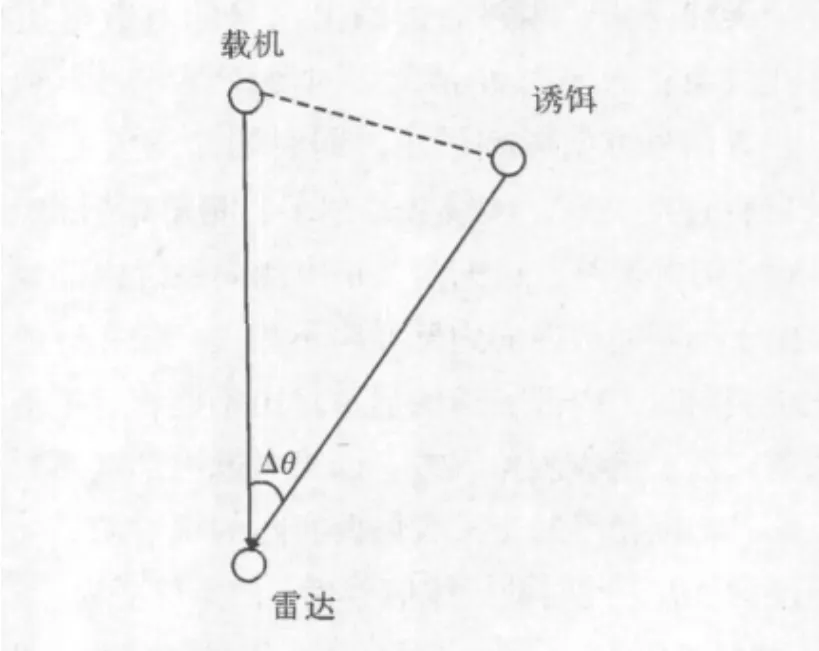
图1 非相干干扰示意图
假设该干扰源与载机回波的时间差、频率差、角度差、功率比分别为Δt,Δfd,Δθ,KJ,末制导雷达的距离、多普勒频率、角度分辨力分别为δR,δfd,δθ,根据非相干干扰原理,应满足

由此形成末制导雷达的稳态角度偏差dθ为

式(1)中的3个约束条件用以保证末制导雷达在距离、速度和角度上都不能分辨目标回波和干扰信号,从而将载机与干扰源当成一个“虚拟目标”进行跟踪和引导。式(2)则是在此约束条件下得到的跟踪方向与载机之间的角度偏差,它主要取决于功率比KJ。
TRAD作为一种载机外干扰源,通过拖曳线与载机相连,能逼真地模拟载机的航速、航向及雷达反射特性,使一般单脉冲雷达导引头的跟踪系统无法通过运动特性来区分载机和诱饵。在中远距离上,无论是迎头、尾追还是截击,载机回波信号与诱饵干扰信号的多普勒频率差与距离差,以及弹机连线与弹诱连线的张角分别小于普通单脉冲导引头雷达的多普勒频率分辨率、距离分辨率以及角度分辨率,即满足式(1)的条件,导引头较难分辨载机回波信号与诱饵干扰信号,因此,干扰信号较容易捕获导引头的跟踪波门。当导弹运动到一定位置后,也可以通过载机机动形成载机、诱饵、导弹之间的三角态势后,总有一个不满足式(1)的时刻,而且通常是出现角度可分辨的情况Δθ>δθ,此时单脉冲末制导雷达将按照该时刻前载机回波与干扰信号功率比的概率,选择某个方向继续跟踪。显然如果此时干扰功率高于目标回波信号功率的概率越大,末制导雷达跟踪拖曳诱饵的概率也越大。
2 测量抗拖曳式诱饵干扰的分析与仿真
2.1 可行性分析
通过第一节拖曳式诱饵干扰工作原理分析可知,拖曳式诱饵作用是使末制导雷达在距离、速度和角度上都不能分辨目标回波和干扰信号,从而将目标与干扰源当成一个“虚拟目标”进行跟踪和引导。为通过减小雷达天线波束宽度,提高雷达的角度分辨率抑制拖曳式诱饵的干扰不可行时,因为雷达天线波束越小,载机逃逸出雷达天线波束照射范围的几率也会相对增大。所以需要寻找其他的方法,使雷达在天线波束宽度在不变的条件下仍然能够分辨出载机和诱饵。
由于TRAD与载机的运动特性一致,在中远距离上,弹机连线与弹诱连线的张角较小,导弹——载机的相对速度与导弹——诱饵的相对速度几乎相同。但随着距离的接近,两者对导弹的张角逐渐增大,相对速度差也越来越大。这时如果导引头的速度分辨力较高,进行频谱分析时,将可以观察到单根谱线逐渐分离成两根,进而对两者进行分辨。一般两者速度相差两个速度分辨单元宽度时,导引头即可分辨出载机与诱饵[2]。
速度选通角度测量方法是指在进行单脉冲测角前,首先进行速度跟踪,只有当速度跟踪上目标后才进行角度测量,此时角度测量仅在特定速度回波信号的单元做角度测量,因此经过速度选通,干扰信号在频域被截断,干扰信号损失Δfj/Δfd倍,其中Δfd为雷达的多普勒频率分辨率。若干扰信号与雷达速度跟踪的信号不在同一个速度单元,干扰信号则被完全抑制。
PD雷达具有速度测量的能力,并且改变雷达参数可以提高多普勒分辨率,达到速度高分辨的要求。如果在分离点前,PD雷达就已经从频率上分辨出目标和诱饵,配合速度选通角度测量,就可以消除诱饵对导引头单脉冲测角系统的干扰[3-4]。
2.2 仿真与分析
针对导弹迎头攻击的作战场景,载机的多普勒速度会小于诱饵的多普勒速度。在进行频谱分析时,两根谱线中频率较高的一根属于诱饵,此时将回波信号通过一个带通或低通滤波器,滤除频率较高的谱线后再进行角度测量便能够削弱诱饵对导引头单脉冲测角系统的影响。
仿真初始时刻以拦截导弹发射点为坐标原点,导弹飞行速度1 000 m/s,初始时刻导弹入射角与导引头速度矢量均为40°,雷达发射功率Pt=1 000 W,目标方向导引头发射天线增益Gt=36 dB,目标方向导引头接收天线增益Gr=36 dB,导引头工作波长λ=0.03 m,目标雷达截面积σ=3 m2,采用不起伏模型,雷达发射机和接收机综合损耗分别为γT=1 dB,γR=1 dB,导引头半功率波束宽度为3°,比例导航系数取3,弹目初始距离R=7 000 m,中放增益G=60 dB,导弹跟踪下限cT/2=150 m,导弹杀伤半径70 m。载机无机动,飞行速度800 m/s,沿水平方向匀速飞行,飞行方位角为39°。诱饵发射功率Pj=200 W,诱饵天线增益Gj=0 dB,发射损耗γj=1 dB,拖曳线长度L=150 m,诱饵下坠角5°。采用速度高分辨时多普勒分辨力Δfd=976.562 5 Hz,多普勒带通滤波器的通带带宽Bf=Δfd,制导时间间隔0.020 0 s。
仿真结束条件:
(1)导弹距离载机或诱饵的最小距离小于导弹的杀伤半径。
(2)导弹与目标或诱饵的空间距离连续n个周期均为渐远。
仿真目的:
通过比较普通单脉冲雷达和速度高分辨单脉冲PD雷达的仿真结果,验证速度高分辨单脉冲PD雷达抗拖曳式诱饵转发式干扰的能力。
仿真结果:
(1)普通单脉冲雷达,近炸引信引爆导弹时的弹目距离133.816 3 m,近炸引信引爆导弹时的弹诱距离为66.290 4 m。仿真导弹、载机和诱饵的轨迹和角度跟踪曲线如图4所示。
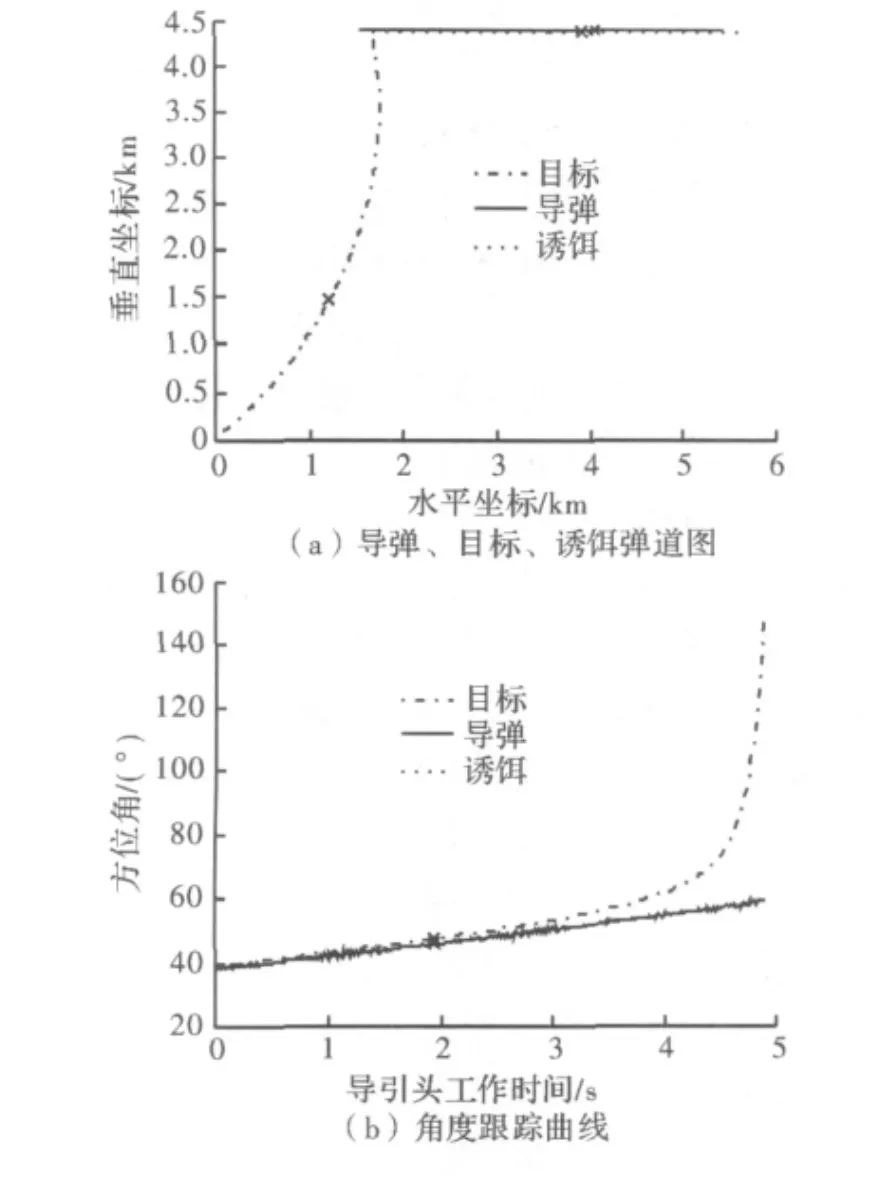
图4 普通单脉冲雷达仿真结果
(2)速度高分辨PD雷达,近炸引信引爆导弹时的弹目距离66.228 9 m,近炸引信引爆导弹时的弹诱距离189.483 0 m。仿真导弹、载机和诱饵的轨迹和角度跟踪曲线如图5所示。
图4和图5中的“×”均表示载机或诱饵逃逸出雷达和波束宽度的时刻即分离点。通过仿真结果的比较,可以看出在普通单脉冲雷达和速度高分辨PD雷达的仿真参数相同的情况下,普通单脉冲雷达导引头完全被诱饵诱偏,导引头上的近炸引信引爆炸弹时,载机逃逸诱饵被炸毁,诱饵起到了保护载机的作用;但采用有速度高分辨和多普勒滤波体制时,导弹在分离点前就已经跟踪上了载机,导引头上的近炸引信引爆炸弹时,载机被炸毁,诱饵没有起到保护载机的作用。
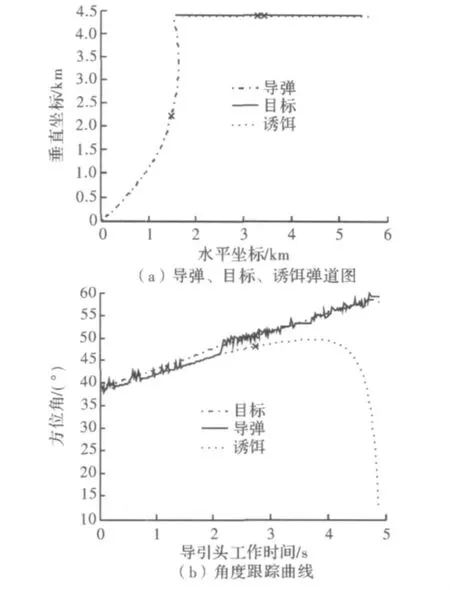
图5 速度高分辨PD雷达仿真结果
3 结束语
拖曳式雷达有源诱饵可以对单脉冲雷达进行有效的角度干扰,受到国内外军事领域的广泛关注。尽管单脉冲雷达目前还不能从角度上分辨出载机和诱饵,但根据拖曳式诱饵的特点,采取一些其他技术方法,还可以有效地抑制其对单脉冲雷达角度测量系统的干扰。
[1] 方有培.拖曳式有源射频诱饵干扰防空导弹研究[J].航天电子对抗,2001(4):16-19.
[2] 周栋.拖曳式诱饵对抗方法探讨[J].制导与引信,2010,31(2):10-11.
[3] 韩晋平,冉小凤.拖曳式雷达诱铒的噪声干扰分析与仿真[J].电子科技,2011,24(3):62-65.
[4] 张瑜,张德贤.基于类别比例因子和类内均分度的χ2统计改进[J].电子科技,2010,23(12):74-76.
